一种基于星时驱动的电推进位置保持方法
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及一种基于星时驱动的电推进位置保持方法,主要用于卫星电推力器位置保持的软件设计与实现,属于航天器嵌入式软件设计领域。
背景技术
电推进是一种利用电能加速推进工质从而实现高比冲的航天器推进技术。高比冲带来的低推进剂消耗可以大幅缩减推进剂携带量。与化学推进相比,采用电推进系统可以延长卫星寿命、改善在轨性能和提高载荷比。电推进应用于卫星的轨道提升、位置保持成为发展趋势。但是由于电推进的推力小,电推进卫星的位置保持以数周为一个位保周期,每个位保周期的前几日由地面测轨制定位保策略确定位保参数,剩余的时间内卫星每圈轨道都进行数次的位保点火控制,并在此基础上进行角动量卸载。将电推力器在每轨点火时段看成是卫星在轨道上运行的一个弧段,电推进位置保持是由多个轨道和多个弧段组成。
针对电推进点火任务的多轨道和多弧段特性,传统的完全依赖地面测控网进行推力器开关机,工作量极大增加。本发明提出了一种基于星时驱动的电推进位置保持方法,地面上传一次位保周期内所有位置保持的点火参数,由卫星自动执行点火。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提供一种基于星时驱动的电推进位置保持方法,解决了传统的完全依赖地面测控网进行推力器开关机的问题。
本发明的技术方案是:一种基于星时驱动的电推进位置保持方法,包括如下步骤:
(1)对电推进点火任务参数进行预处理,按参数是否根据任务变化的特点分为策略参数和属性参数;
(2)根据策略参数和属性参数,通过星时驱动,按时间顺序依次进行电推力器每轨点火前的初始化工作、矢量调节机构转向调节、电推力器参数配置、开机弧段处理。
所述步骤(1)的具体方法为:
(11)对每个电推力器进行数字编号索引1,2…,NUM,其中NUM为电推力器安装的数目。
(12)每次点火任务前,根据地面是否需要更新点火任务参数,将点火任务参数分为策略参数和属性参数。
所述步骤(12)的具体方法为:
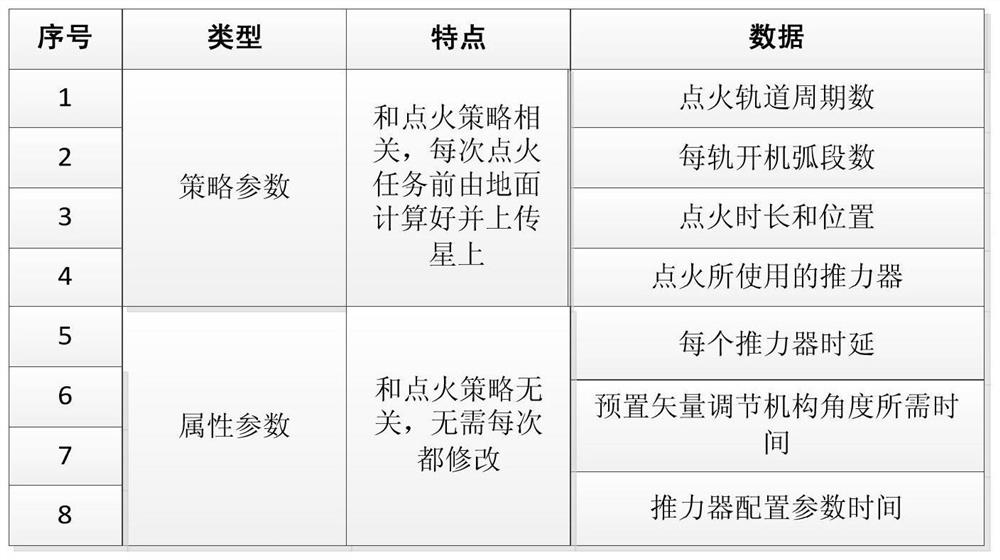
(121)将策略参数具象为一组变量V:点火轨道周期数nOrb、开机弧段数nArc、点火时长和位置用点火起始时刻TS以及点火结束时刻TE来表示,开机弧段所使用的推力器用编号E来表示。每次点火的策略参数中均包含(nOrb×nArc)个TS、TE和E。在每次位保点火任务前,由地面注入该组变量值。
(122)将属性参数具象为一组变量R:每个推力器的推力时延TD、预置矢量调节机构角度所需时间TP,推力器配置参数时间TC。属性参数中均包含NUM个TD。该组参数一般不随位保策略变化而变化。
所述步骤(2)的具体方法为:
(21)根据每轨第一个开机弧段的推力器编号E,取出该弧段对应的推力器时延TD。根据第一个弧段的点火起始时间TS和推力器时延TD以及预置矢量调节机构角度所需时间TP,计算出每轨点火前初始化对应的时刻Ti,即Ti=TS-TD-TP。判断卫星的星时Ta与Ti的大小,若Ta等于Ti时,则转入步骤(22),进行每轨点火任务前的初始化工作,否则进入步骤(31);
(22)置开机弧段计数器A=1,并计算出角动量卸载量对应的该轨所有弧段所用推力器的方向偏移量,之后转入步骤(23);
(23)进行每轨第一个开机弧段的矢量调节机构转向调节处理,当矢量调节机构调节到位时,进入步骤(24),否则进入步骤(31);
(24)提前调节下一开机弧段的矢量调节机构,便于在下一开机弧段到来时,所用推力器指向已调节到位,之后转入步骤(25);其中,下一开机弧段编号为A+1;
(25)计算参数配置时刻Tc=TS-TD-TC。判断卫星的星时Ta与当前开机弧段的参数配置时刻Tc的大小,当Ta等于Tc时,星上软件进行电推力器参数配置,并转入步骤(26)执行,否则进入步骤(31);
(26)判断卫星的星时Ta,若星时Ta等于当前开机弧段的开机起始时刻TS时,则转入步骤(27),否则进入步骤(31);
(27)星上软件给当前弧段的电推力器发点火指令;判断卫星的星时Ta,若星时Ta等于当前开机弧段的关机时刻TE时,则转入(28),否则进入(31);
(28)星上软件给当前弧段的电推力器发停止点火指令,之后进入步骤(29);
(29)判断当前开机弧段计数器A与开机弧段数numSeq的大小。若A小于numSeq,则置开机弧段计数器A=A+1,转入步骤(31),执行下一开机弧段点火流程处理;否则,进入步骤(30);
(30)判断点火轨道周期计数器O与点火轨道周期数numOrb的大小,若O小于numOrb,则置点火轨道周期计数器O=O+1,之后跳转到步骤(31),继续下一轨道的初始化工作和弧段处理;否则跳转到步骤(32);
(31)重复(21)-(30)步骤,进行下一个软件控制周期的点火流程;
(32)点火策略参数置0。本次点火任务结束。
本发明与现有技术相比的优点在于:
(1)本发明针对电推进位置保持的特点,通过对点火任务参数进行预处理,实现了多轨道和多弧段的点火任务,点火轨道数和弧段数可地面灵活配置,适应不同卫星的电推控制策略,具有更好的灵活性和可扩展性。
(2)本发明通过星时驱动方式,星上通过判断星时能自动执行点火流程,直至完成整个点火任务。地面无需一一向电推力器发开机和关机指令,提高了卫星的自主运行能力。
(3)该方法已经在某个在轨卫星的电推进位置保持进行了应用,经工程实施验证了该方法的可行性和有效性。
附图说明
图1为点火任务参数组成结构表;
图2为点火弧段处理流程图;
图3为本发明基于星时驱动的电推进位置保持方法流程图;
具体实施方式
本发明一种基于星时驱动的电推进位置保持方法,针对电推进位置保持任务多轨道和多弧段的特点,传统电推进位置保持完全依赖地面测控网进行推力器开机和关机,本发明采用星时驱动的方式,卫星按时间顺序依次进行电推力器每轨点火前的初始化工作、矢量调节机构转向调节、电推力器参数配置、开机弧段处理。本发明实现了电推进的多轨道和多弧段的自动点火任务,提高了卫星的自主运行能力,点火轨道数和弧段数可地面灵活配置,具有更好的灵活性和可扩展性。下面结合附图对本发明的具体实施方式进行进一步的详细描述。
本发明一种基于星时驱动的电推进位置保持方法,如图3所示具体步骤如下:
第一步,识别电推点火任务参数:
对每个电推力器进行数字索引编号1,2…,NUM,其中NUM为电推力器安装的数目。根据点火任务参数变化的特点,可按参数是否根据任务变化分为策略参数和属性参数。策略参数和属性参数的构成如图1所示。
将策略参数具象为一组变量V:点火轨道周期数numOrb、开机弧段数numArc、点火时长和位置用点火起始时刻TS
将属性参数具象为一组变量R:每个推力器的推力时延TD
第二步,每轨点火前的初始化工作:
根据每轨第一个开机弧段的推力器编号Elec
根据第一个弧段的点火起始时间TS
第三步,矢量调节机构转向调节处理:
根据每轨第一个开机弧段的推力器编号Elec
第四步,开机弧段处理:
(1)提前调节下一开机弧段所用推力器的推力指向
在当前开机弧段处理中,提前调节下一开机弧段的推力指向,便于在下一开机弧段到来时,所用推力器指向已调节到位。下一开机弧段推力器编号为Elec
(2)星时驱动推力器参数配置
由于电推力器的功率特性,可产生不同大小的推力,所需要的电推点火配置参数也不同。在电推力器开机前,应根据当前弧段使用的推力器编号,提前选择对应的配置参数。
计算参数配置时刻Tc=TS
(3)星时驱动开机指令
判断卫星的星时Ta与当前开机弧段的点火起始时刻TS
(4)星时驱动关机指令
判断卫星的星时Ta与当前开机弧段的点火关机时刻TE
第五步,点火任务结束判断策略
(1)开机弧段结束判断策略
判断当前开机弧段A编号与开机弧段数numSeq的大小。若A小于numSeq,则置当前开机弧段编号A=A+1,并跳转到第四步执行下一开机弧段处理。若A等于numSeq,则说明轨道周期O的所有开机弧段已执行完毕,跳转到步骤(2)轨道周期结束判断策略。
(2)轨道周期结束判断策略
判断当前点火轨道周期编号O与点火轨道周期数numOrb的大小,若O小于numOrb,则置点火轨道周期编号O=O+1,并跳转到第二步继续下一轨道的初始化工作和弧段处理。若O等于numOrb,则点火策略参数V清零,本次点火任务结束。
- 一种基于星时驱动的电推进位置保持方法
- 一种基于星时驱动的电推进位置保持方法