一种火星车自主休眠与唤醒控制方法
文献发布时间:2023-06-19 09:43:16
技术领域
本发明属于航天器在轨自主运行控制技术领域,具体涉及一种火星车自主休眠与唤醒控制方法。
背景技术
中国将在2020年发射火星车进行火星表面巡视探测。火星车火面工作最主要的约束是能源,由于能源紧张,即使在可视弧段内,火星车上的通信设备也不能长期开机,每天通信时长非常有限。按照任务规划,在火昼期间火星车有能源补充时,进行移动、感知、探测等耗能较多的探测任务;在火夜期间火星车没有能源补充时,进行通信、数传等耗能较少的探测任务。
火星车依赖太阳翼发电补充能源,能源生成情况与火星时间、天气密切相关。火星表面地形崎岖,大气稀薄,存在沙尘天气。晴朗天气下能源充足,沙尘天气下能源匮乏。由于与太阳的距离更远,光照相对较弱,火面平均太阳光强平均约为地球的0.43倍,目前国际上通常采用的地球轨道光强为1353W/m
综上所述,火星车在能源上面临火面环境恶劣、电池容量有限、发电效率低、耗电功率高等多重因素的影响,能源极其紧张。火星车完成科学探测任务的前提是保证自身生存,为确保自身生存,需要维持火星车自身的能源平衡。国外深空探测器主要采用放射性同位素温差电池提供能源,如阿波罗登月计划、旅行者号探测器、伽利略号探测器等。放射性同位素温差电池结构紧凑、可靠性高、寿命长、受环境影响小,美国在未来多个深空探测计划中将继续研制、使用高性能的同位素温差电池。由于技术基础、探测器总质量、项目预算等多方面的限制,目前我国探测器还未采用同位素温差电池,而是采用“休眠-唤醒”的方式规划深空探测器的能源消耗,解决探测器的能源平衡问题。在我国已经发射的嫦娥三号、嫦娥四号探测器上,采用“延时程控+自主唤醒”的控制方式,控制探测器在月夜时进入休眠,在月昼来临后自主唤醒,使探测器具备了在月夜极端工况下保证生存的能力。
在以火星车为代表的深空探测器采用上述方法应对火面极端工况时,主要存在以下问题:
(1)火面工作环境与月面不同。月球表面大气稀薄,探测器能源平衡的主要威胁是可预测的月夜。火面存在大气,探测器能源平衡受火面天气影响较大,而火面天气变化是难以预测的。因此,采取嫦娥三号、嫦娥四号的规划式休眠唤醒难以应对火面工作环境。在天气较好的情况下,规划式休眠唤醒会浪费宝贵的通信弧段。在天气较差的情况下,规划式休眠唤醒难于及时根据探测器能源水平对探测器工作模式进行适应性调整,可能造成探测器电池的放电深度下降到较低水平,对后续任务造成不利影响,甚至威胁探测器生存。
(2)规划式休眠唤醒需要地面向探测器预先注入关闭载荷设备、调整测控模式、调整热控模式、调整太阳翼姿态等一系列设置指令,对测控实时性、测控链路稳定性的要求较高。与月球探测任务相比,火星探测任务的通信弧段、时长都十分有限,且存在在一段时间内无法建立通信的可能。若采用规划式休眠唤醒设计,在火星车需要进入休眠状态时,存在因为测控条件不佳导致火星车无法及时进入休眠态的可能。
(3)在规划式休眠唤醒中,探测器进入休眠的时刻是确定的,唤醒的时刻也是可预期的,因此探测器可以在唤醒后自主推测出一个精度可接受的器上时间。由于火面天气难以预测,火星车唤醒时刻存在不确定性,唤醒后器上时间与实际时间误差较大,已经不再可信,无法判断后续应进行那些工作。因此,火星车唤醒后首先需要尝试跟地球或中继星建立通信,从地球、中继星获取准确的时间,以作为后续工作的依据。
发明内容
有鉴于此,本发明的目的是提供一种火星车自主休眠与唤醒控制方法;首先,保证火星车休眠后能保留充足的电量,为后续唤醒后恢复能源平衡提供基础;其次,保证唤醒后尽可能使蓄电池保持供电状态,同时保护蓄电池不被过放;再次,解决由于休眠、唤醒时刻的不可预期性,造成通信窗口错位无法正常通信的问题。
一种火星车控制方法,其特征在于,包括自主休眠控制方法,具体包括如下步骤:
步骤(1)、判定当前处于能源相对充足工况还是能源匮乏工况,如果是能源相对充足工况,执行步骤(2),否则执行步骤(3);
步骤(2)、能源相对充足工况下的自主休眠控制:
2a)当前火星日峰值电量判定:
火星车周期性检测一帧太阳阵输出电流,当检测到连续多帧大于充电电流门限后,记为充电状态,转换状态至放电检测状态;在之后的检测中,当检测到连续多帧小于放电电流后,判断火星车电量达到当前火星日的峰值电量,立刻进行一次休眠检测,即执行2b);
2b)进行休眠检测:
设Q为当前电池电量,Q0为蓄电池满电峰值容量阈值,Q1为蓄电池轻度沙尘峰值容量阈值;
①如果Q1≤Q<Q0,火星车转最小工作模式,且记录电量为Qold;转换状态至充电检测状态;
在下一次检测充电转放电事件后,检测当前蓄电池电量Q,如果Q<Qold,则控制火星车立刻进行休眠设置;如果Qold≤Q<Q0,则火星车维持最小工作模式,继续充电检测;如果Q≥Q0,则控制火星车转回正常工作模式,继续充电检测;
②如果Q<Q1,则控制火星车立刻进入休眠;
③如果Q≥Q0,火星车维持当前工作状态不变,继续保持充电检测状态;
步骤(3)能源匮乏工况下的自主休眠控制:
3a)当前火星日峰值电量判定:
火星车周期性检测一帧太阳阵输出电流,当检测到连续多帧大于充电电流门限后,记为充电状态,转换状态至放电检测状态;在之后的检测中,当检测到连续多帧小于放电电流后,判断火星车电量达到当前火星日的峰值电量,立刻进行一次休眠检测,即执行3b);
3b)峰值电量判定:
设Q2为能源匮乏工况下的峰值容量阈值;如果检测到Q<Q2,火星车立刻休眠;否则,火星车维持当前工作状态不变;
3c)实时电量判定:
火星车周期性检测蓄电池电量Q,如果连续多帧电量低于能源匮乏工况下蓄电池过放阈值Q3且充放电电流为放电状态,启动自主休眠,否则继续检测。
较佳的,未发生过休眠唤醒时,判断火星车处于能源相对充足态;发生过休眠唤醒,判断火星车处于能源匮乏态。
较佳的,自主休眠检测由地面根据在轨实际情况通过发指令的形式开启。
进一步的,在执行步骤(1)之前,先检测任务使能禁止状态,如果是禁止状态,结束本轮休眠检测;如果是使能状态,继续执行步骤(1)。
较佳的,Q0和Q1的值可在轨修改。
进一步的,还包括唤醒后通信恢复控制:
休眠后当太阳翼输出功率逐步上升,火星车自主唤醒;唤醒后,将器上时间清零,自主设置器上设备工作状态为唤醒后预设状态;周期性开关测控链路,尝试恢复通信;地面、中继星在每次尝试建立测控链路过程中,持续性发送授时指令,火星车唤醒后第一次接收到直接地面或环绕器授时指令,进行时间调整,同时转入最小工作模式。
本发明具有如下有益效果:
1)本发明方法与现有技术相比,提出了一种根据是否曾经休眠过来选择火星车休眠策略的方法,为器上选用能源相对充分工况下自主休眠策略还是能源匮乏工况下自主休眠策略提供了依据,提升了自主休眠策略的使用灵活性。
2)本发明方法与现有技术相比,提出了一种适用于能源相对充分工况的自主休眠策略。其特点在于根据火星车在每个火星日的峰值电量判断是否需要进入休眠态或进行最小工作模式,并可在能源状况好转后从最小工作模式自主恢复为正常工作模式。该策略适用于火星车在火面检测到沙尘后尽快休眠,保证火星车休眠后能保留充足的电量,为后续唤醒后在最小工作模式下充电以恢复能源平衡提供基础。
3)本发明方法与现有技术相比,提出了一种适用于能源匮乏工况的自主休眠策略。其特点在于结合火星车在每个火星日的峰值电量和火星车当前实时电量,共同判断是否需要进入休眠。该策略适用于唤醒后使用,旨在唤醒后尽可能使用蓄电池来维持供电不进行休眠,同时又保护蓄电池不被过放。
4)本发明方法与现有技术相比,提出了一种唤醒后恢复通信的控制策略,解决了由于休眠、唤醒时刻的不可预期性,造成通信窗口错位无法正常通信的问题。
附图说明
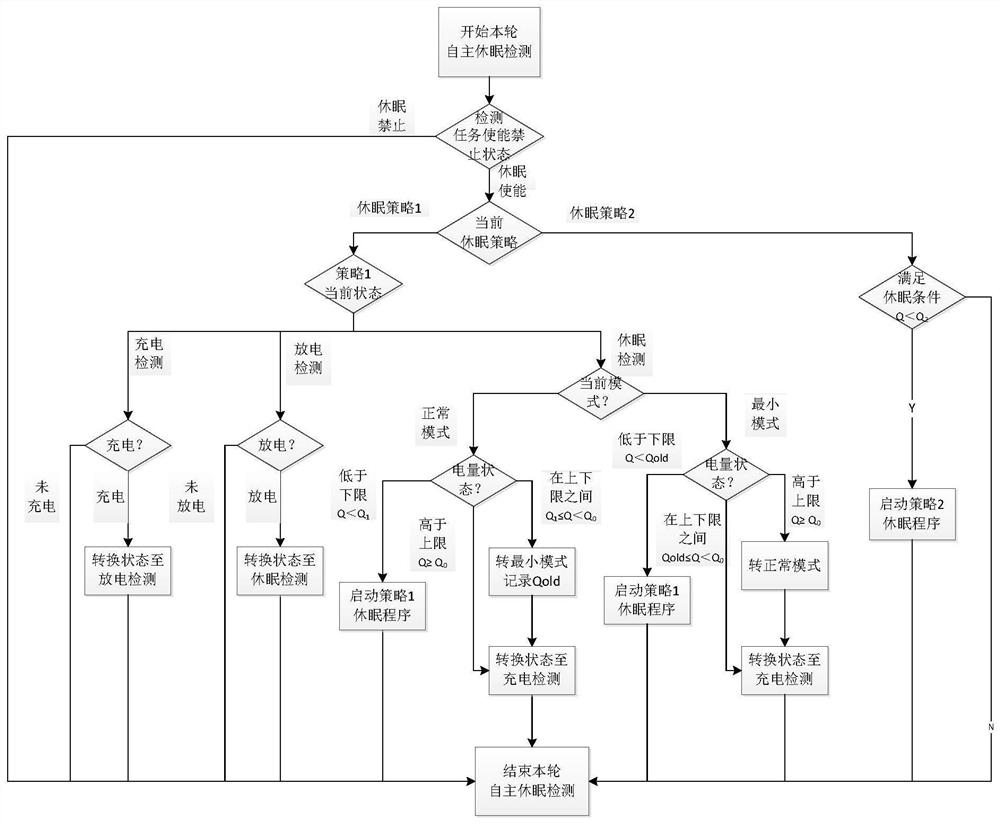
图1为火星车自主休眠检测流程图。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本发明提出了一种火星车自主休眠与唤醒控制方法。该方法使用火星车蓄电池电量作为预测能源平衡的判据,在预测能源风险后自主进入休眠态。将火星车的工作状态划分为能量相对充足、能量匮乏两种工况,为不同工况设计了不同的能源平衡预测策略。在唤醒后,自主规划火星车测控设备的开关,尝试与地面、中继星恢复通信。通过上述步骤,使火星车能够在能源匮乏时自主进入休眠,在外部光照条件好转而唤醒后自主恢复与地球、中继星的通信。
其特点在于:
(1)通过火星车是否发生过休眠唤醒,将火星车的工作状态划分为能源相对充足、能源匮乏两种工况。未发生过休眠唤醒时,判断火星车处于能源相对充足态;发生过休眠唤醒,判断火星车处于能源匮乏态。在不同状态下,采用不同的自主休眠策略。
(2)针对能源相对充足态,采用火星车在每个火星日的峰值电量作为能源平衡的判据。通过不同的门限阈值,进一步将能源失衡的状态区分为轻度失衡、重度失衡两种。在能源轻度失衡情况下,器上自主转入最小工作模式以降低耗能,暂不进入休眠;后续峰值电量转好后,可从最小工作模式转回正常工作模式。在能源重度失衡情况下,器上自主进行休眠状态设置,进入休眠态。
(3)针对能源匮乏态,结合峰值电量和实时电量共同判定是否进入休眠。峰值电量的判定时机与能源充足态相同,一旦判定能源平衡恶化直接进入休眠。
实时电量的判定周期性进行,结合整车充放电状态判断是否需进入休眠态。当整车处于充电状态时,认为后续能源平衡存在改善的可能性,暂不进入休眠态;当整车处于放电状态,且电池电量低于阈值时,认为能源失衡程度正在加大,器上自主进行休眠状态设置,进入休眠态。
(4)针对休眠、唤醒时刻的不可预期性,设计了一种唤醒后通信恢复策略。在唤醒后,器上自主周期性开关测控设备,创造对地、对中继星测控条件。
如图1所示,本发明的实施步骤说明如下:
(1)判定当前处于能源相对充足工况还是能源匮乏工况
火星车自主休眠策略分为能源相对充足自主休眠策略、能源匮乏自主休眠策略。
能源相对充足自主休眠策略旨在检测到沙尘后尽快休眠,保证火星车休眠后能保留充足的电量,为后续唤醒后恢复能源平衡提供基础。能源相对充足自主休眠策略在首次自主休眠前使用。能源匮乏自主休眠策略在唤醒后使用,旨在唤醒后尽可能使用蓄电池来维持供电不进行休眠,同时又保护蓄电池不被过放。地面可以通过上行注入更改自主休眠策略。火星车着陆前、EDL段和火星车着陆后初期工作不进行自主休眠检测,自主休眠检测由地面根据在轨实际情况通过发指令的形式开启。
火星车在大功率工作时,可能误触发自主休眠,为了避免该情况,可根据实际指令动作功耗情况,在大功率设备工作指令前单独增加自主休眠检测禁止指令,在大功率工作指令后单独增加自主休眠检测使能指令。
(2)能源相对充足工况下的自主休眠策控制:
a)当前火星日峰值电量判定:
火星车周期性检测一帧太阳阵输出电流,当检测到连续多帧大于充电电流门限后,记为充电状态,转换状态至放电检测状态;在之后的检测中,当检测到连续多帧小于放电电流后,判断火星车电量达到当前火星日的峰值电量,立刻进行一次休眠检测,即执行b)。
b)进行休眠检测:
Q为当前电池电量,Q0为蓄电池满电峰值容量阈值和Q1为蓄电池轻度沙尘峰值容量阈值(蓄电池在满电情况下,遭遇轻度沙尘,火星车执行正常工作任务后,蓄电池剩余电量),该两个值应可在轨修改。
①如果Q1≤Q<Q0(连续测多次),火星车转最小工作模式,且记录电量为Qold(作为重要数据保存);转换状态至充电检测状态;
在下一次检测充电转放电事件后,检测当前蓄电池电量Q,如果Q<Qold(连续测多次),则认为当日光照条件低于最小工作模式天气光照,火星车立刻进行休眠设置。如果Qold≤Q<Q0(连续测多次),则认为当日光照条件高于最小工作模式天气光照,天气有所好转,不设置休眠,但蓄电池未满,能源安全裕度低,火星车维持最小工作模式,进入充电检测状态。如果Q≥Q0(连续测多次),则认为光照条件较好,蓄电池恢复到满电状态此时火星车转回正常工作模式,继续充电检测。
②如果Q<Q1(连续测多次),则说明当日光照条件低于最小工作模式天气光照,火星车立刻进入休眠。
③如果Q≥Q0,火星车维持当前工作状态不变,继续保持充电检测状态。
(3)能源匮乏工况下的自主休眠控制:
a)当前火星日峰值电量判定:
火星车周期性检测一帧太阳阵输出电流,当检测到连续多帧大于充电电流门限后,记为充电状态,转换状态至放电检测状态;在之后的检测中,当检测到连续多帧小于放电电流后,判断火星车电量达到当前火星日的峰值电量,立刻进行一次休眠检测,及执行b)。
b)峰值电量判定:
Q为当前电池电量,Q2为能源匮乏工况下的峰值容量阈值。
①如果连续L次检测到Q<Q2,火星车立刻休眠;
②否则,火星车维持当前工作状态不变。
c)实时电量判定:
火星车周期性检测蓄电池电量Q,如果连续多帧电量低于Q3(能源匮乏工况下蓄电池过放阈值)且充放电电流为放电状态,启动自主休眠,否则继续检测。
(4)唤醒后通信恢复控制:
沙尘过后,太阳翼输出功率逐步上升,火星车自主唤醒(包括二次电源开关、蓄电池组放电开关、火星车一次母线开关自主接通)。唤醒后,将器上时间清零,自主设置器上设备工作状态为唤醒后预设状态。周期性开关测控链路,尝试恢复通信。地面、中继星在每次尝试建立测控链路过程中,持续性发送授时指令,火星车唤醒后第一次接收到直接地面或环绕器授时指令,进行时间调整,同时转入最小工作模式。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种火星车自主休眠与唤醒控制方法
- 一种火星车自主休眠与唤醒系统