车载超声波雷达硬件在环测试试验台
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及一种在环测试试验台,特别涉及一种车载超声波雷达硬件在环测试试验台。
背景技术
目前,自动泊车是智能驾驶汽车领域的一个重要研究方向,超声波雷达是实现自动泊车功能的重要传感器,超声波雷达能够实现检测车位功能,同时在泊车过程中还可以实时检测车辆与障碍物的相对距离和相对方位。为保证超声波雷达能在自动泊车过程中稳定可靠地运行,需要对超声波雷达进行测试。目前,汽车生产厂商对超声波雷达的测试一般为实车试验,即把超声波雷达安装在实车上,在真实场景下检测环境信息,以此测试超声波雷达的可靠性。但是这种方法不仅浪费了大量的人力、物力以及财力,而且车辆还存在碰撞的危险。目前,也存在较多的车用超声波雷达测试试验台,例如:中国专利CN110208006B,“用于泊车系统感知测试的模拟车辆组合台架”,搭建了一套可以安装多个超声波雷达的台架,但是此台架只能检测真实场景下的障碍物,难以满足测试大量不同的场景和不同工况的要求。中国专利CN105204028B,“一种基于超声波传感器的倒车辅助硬件在环开发系统”,将4个超声波雷达安装在车尾,无法进行车位检测,且只能检测真实场景下的障碍物,测试场景有限,试验周期长。
发明内容
本发明的目的是为了解决现有的智能汽车超声波雷达测试过程中采用实车测试,所导致的测试周期长、测试成本高并具有一定的危险性,以及测试场景有限的问题而提供的一种车载超声波雷达硬件在环测试试验台。
本发明提供的车载超声波雷达硬件在环测试试验台包括有台架、旋转平台、短距超声波雷达、长距超声波雷达、收发天线、步进电机、吸波暗箱、收发变频器和数据处理系统,其中旋转平台设在台架的顶部,旋转平台的下部连接有转轴,步进电机设在台架的下部,步进电机通过驱动机构与旋转平台下部的转轴相连接,步进电机通过转轴驱使旋转平台进行转动,吸波暗箱装配在旋转平台的顶面上,短距超声波雷达和长距超声波雷达设在吸波暗箱内,对应短距超声波雷达和长距超声波雷达位置的吸波暗箱侧壁上开设有通孔,收发天线设在吸波暗箱的外部的旋转平台上并对应通孔的位置处设置,收发天线通过通孔与短距超声波雷达和长距超声波雷达传输信号,收发天线与收发变频器相连接,收发天线能够把接收的信号数据实时传输给收发变频器,收发变频器与数据处理系统相连接,收发变频器能够把收发天线传输的数据实时发送给数据处理系统,长距超声波雷达和短距超声波雷达与数据处理系统通过CAN总线连接,长距超声波雷达和短距超声波雷达能够发送超声波信号并接收收发天线发出的超声波信号,步进电机与数据处理系统相连接并由数据处理系统控制工作。
步进电机带动旋转平台的驱动机构是由主动直齿锥齿轮和从动直齿锥齿轮组成,其中主动直齿锥齿轮固连在步进电机的输出轴上,从动直齿锥齿轮固连在旋转平台下部的转轴上,主动直齿锥齿轮与从动直齿锥齿轮相啮合,步进电机通过主动直齿锥齿轮与从动直齿锥齿轮的啮合从而带动转轴和旋转平台进行转动,转轴的顶端通过法兰盘与旋转平台相连接。
旋转平台的底部设置有滚轮,滚轮装配在台架顶端的支架上。
吸波暗箱内的短距超声波雷达和长距超声波雷达对应设置有两组,每组设置有六个短距超声波雷达和长距超声波雷达,其中中间四个为短距超声波雷达,两侧对称设置有两个长距超声波雷达,对应每组的短距超声波雷达和长距超声波雷达的吸波暗箱外部设置有三个收发天线,吸波暗箱的外部对称设置有六个收发天线。
台架的底端设置有万向轮。
上述的短距超声波雷达、长距超声波雷达、收发天线、步进电机、收发变频器和数据处理系统均为现有设备的组装,因此,具体型号和规格没有进行赘述。
本发明的工作原理:
本发明提供的车载超声波雷达硬件在环测试试验台中的收发天线和收发变频器连接,收发天线能够接收到超声波雷达发出的超声波信号,并将数据处理系统模拟出来的虚拟目标信号发送回超声波雷达,收发变频器能将收发天线接收到的超声波信号变频到数据处理系统能够处理的频率,并且将数据处理系统模拟出来的虚拟目标信号变频到超声波雷达的工作频率。超声波是一种机械振动模式,以纵波的方式在弹性介质中传播,具有频率f、传播速度c与波长λ三个物理量,三个物理量具有如下关系:
f=c/λ
超声波的频率f大于20KHz,收发变频器将交变电信号转化为频率大于20KHz的声信号。
长距超声波雷达和短距超声波雷达与数据处理系统通过CAN总线连接,长距超声波雷达和短距超声波雷达能够发送超声波信号并接收收发天线发出的超声波信号。
为避免超声波雷达支架反射超声波对超声波回波造成干扰,使八个短距超声波雷达和四个长距超声波雷达均位于同一个圆的圆周上。为使收发天线发出的超声波回波能被超声波雷达接收,同时超声波雷达发出的超声波能被收发天线接收,使六个收发天线均位于同一个圆的圆周上,且此圆的圆周直径大于超声波雷达所在圆的圆周直径。
超声波在空气中,波束形状在近场区和远场区内不同,在近场区的波源线上会出现一系列声压极大极小值,波源线上最后一个声压极大值处至波源的距离称为近场区长度,用N表示。近场区声压有剧烈的起伏变化,存在着许多声压为极小值的节点。这些节点可引起探测的盲点。在远场区声强的变化趋于平稳,随着距离的增加,单调递减。因此收发天线位于的圆的圆周半径与超声波雷达所在圆的圆周半径之差应大于近场区长度N,所述近场区长度N应满足:
其中D为超声波雷达辐射面直径。
数据处理系统根据收发天线传来的超声波信号,结合仿真软件内部设定的障碍物信息以及车辆动力学模型的相关参数,实时输出虚拟的超声波回波信号。超声在空气中传播时存在衰减现象,其强度、压强幅度、振幅都随着距离的增大而按指数规律下降,数据处理系统在模拟超声波回波信号时应满足:
其中,I为声波强度,p为压强幅度,A为振幅,α代表介质弹性磨擦吸收系数;β代表介质粘滞性与热传导系数;γ代表介质内散射体的瑞利散射吸收系数;x为超声波传播的距离。
当数据处理系统中虚拟仿真软件中障碍物和主车相对运动时,会发生多普勒频移,即超声波雷达实际接收的超声波频率与真实源超声波频率不同,收发天线发射的超声波回波应满足多普勒频移现象,具体如下:
其中,Δf为频移值,v为声源与接收体之间的相对运动速度,θ为超声波的入射方向与目标运动方向之间的夹角。
数据处理系统根据车辆动力学模型的车身姿态角实时控制旋转平台旋转同样的角度,可以直观监测自动泊车算法的运行情况。
数据处理系统控制十二个超声波雷达依次发射超声波脉冲,每个长距超声波雷达都单独对应一个收发天线,其余八个短距超声波雷达分为两组,每一组包含四个短距超声波雷达,每一组的四个短距超声波雷达对应一个收发天线,当一个超声波雷达发射出超声波脉冲后,多余超声波都被吸波暗箱吸收,只有小部分被对应的收发天线接收到并被传递到收发变频器,收发变频器将接收到的超声波信号变频为数据处理系统能够处理的信号并传递给数据处理系统,数据处理系统根据接收到的超声波信号结合虚拟仿真软件中障碍物和主车的相对距离、相对速度、相对方位角、障碍物形状信息和主车上超声波雷达的安装位置,生成一个包含主车与障碍物的相对距离、相对速度的虚拟目标信号并传递给收发变频器,收发变频器将接收到的虚拟目标信号变频为超声波信号并通过收发天线发出,被相应超声波雷达接收。当一个超声波雷达的收发完成后,下一个超声波雷达开始工作,重复上述流程,直至十二个超声波雷达遍历上述流程,数据处理系统根据得到的十二组虚拟超声波信号,进行数据融合,得出虚拟车辆模型周围的障碍物信息并发送到自动泊车控制算法中,自动泊车算法运行时,数据处理系统记录虚拟车辆的车身横摆角,并根据车身横摆角控制步进电机,使得旋转平台的旋转角实时跟踪虚拟车辆的车身横摆角。随着自动泊车算法的不断运行,虚拟车辆和障碍物的相对位置不断发生变化,收发天线发出的虚拟回波信号也不断更新,从而使整个测试流程形成闭环,可以用来测试超声波雷达的性能以及算法的可靠性。
本发明的有益效果:
本发明提供的试验台能够模拟障碍物对超声波雷达进行硬件在环测试,本发明使用十二个超声波雷达,按照在实车上的布置方式布置在旋转平台上,能够最大程度接近实车测试的效果,且无需在实车上装卸雷达,操作简单,节省大量人力、物力以及财力;本发明能够在数据处理系统中构建大量不同的虚拟驾驶场景,克服了实车测试中测试场景有限的缺点,同时还降低了搭建驾驶场景的成本,缩短了搭建场景所需要的时间;本发明通过步进电机传动带动旋转平台旋转,从而带动旋转平台上的超声波雷达旋转,模拟车身横摆角的变化;本发明结构简单、安装方便、成本较低、易于市场化,且工作安全可靠,具有较强的可推广性。
附图说明
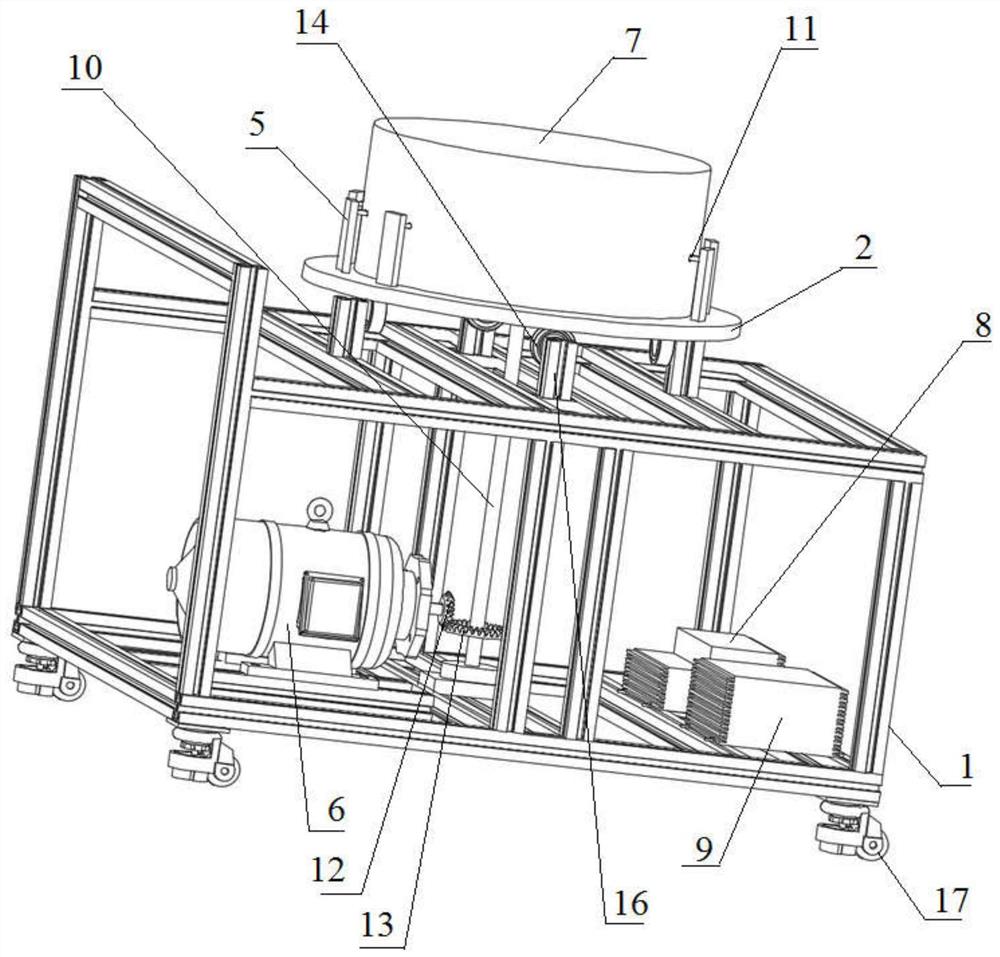
图1为本发明所述试验台整体结构示意图。
图2为本发明所述旋转平台俯视图。
图3为本发明所述吸波暗箱内部结构示意图。
图4为本发明所述旋转平台转轴零件装配关系剖视图。
图5为本发明所述试验台工作流程示意图。
上图中的标注如下:
1、台架 2、旋转平台 3、短距超声波雷达 4、长距超声波雷达 5、收发天线 6、步进电机 7、吸波暗箱 8、收发变频器 9、数据处理系统 10、转轴 11、通孔 12、主动直齿锥齿轮13、从动直齿锥齿轮 14、滚轮 15、法兰盘 16、支架 17、万向轮。
具体实施方式
请参阅图1至图4所示:
本发明提供的车载超声波雷达硬件在环测试试验台包括有台架1、旋转平台2、短距超声波雷达3、长距超声波雷达4、收发天线5、步进电机6、吸波暗箱7、收发变频器8和数据处理系统9,其中旋转平台2设在台架1的顶部,旋转平台2的下部连接有转轴10,步进电机6设在台架1的下部,步进电机6通过驱动机构与旋转平台2下部的转轴10相连接,步进电机6通过转轴10驱使旋转平台2进行转动,吸波暗箱7装配在旋转平台2的顶面上,短距超声波雷达3和长距超声波雷达4设在吸波暗箱7内,对应短距超声波雷达3和长距超声波雷达4位置的吸波暗箱7侧壁上开设有通孔11,收发天线5设在吸波暗箱7的外部的旋转平台2上并对应通孔11的位置处设置,收发天线5通过通孔11与短距超声波雷达3和长距超声波雷达4传输信号,收发天线5与收发变频器8相连接,收发天线5能够把接收的信号数据实时传输给收发变频器8,收发变频器8与数据处理系统9相连接,收发变频器8能够把收发天线5传输的数据实时发送给数据处理系统9,长距超声波雷达4和短距超声波雷达3与数据处理系统9通过CAN总线连接,长距超声波雷达4和短距超声波雷达3能够发送超声波信号并接收收发天线5发出的超声波信号,步进电机6与数据处理系统9相连接并由数据处理系统9控制工作。
步进电机6带动旋转平台2的驱动机构是由主动直齿锥齿轮12和从动直齿锥齿轮13组成,其中主动直齿锥齿轮12固连在步进电机6的输出轴上,从动直齿锥齿轮13固连在旋转平台2下部的转轴10上,主动直齿锥齿轮12与从动直齿锥齿轮13相啮合,步进电机6通过主动直齿锥齿轮12与从动直齿锥齿轮13的啮合从而带动转轴10和旋转平台2进行转动,转轴10的顶端通过法兰盘15与旋转平台2相连接。
旋转平台2的底部设置有滚轮14,滚轮14装配在台架1顶端的支架16上。
吸波暗箱7内的短距超声波雷达3和长距超声波雷达4对应设置有两组,每组设置有六个短距超声波雷达3和长距超声波雷达4的组合,其中中间四个为短距超声波雷达3,两侧对称设置有两个长距超声波雷达4,对应每组的短距超声波雷达3和长距超声波雷达4的吸波暗箱7外部设置有三个收发天线5,吸波暗箱7的外部对称设置有六个收发天线5。
台架1的底端设置有万向轮17。
上述的短距超声波雷达3、长距超声波雷达4、收发天线5、步进电机6、收发变频器8和数据处理系统9均为现有设备的组装,因此,具体型号和规格没有进行赘述。
本发明的工作原理:
本发明提供的车载超声波雷达硬件在环测试试验台中的收发天线5和收发变频器8连接,收发天线5能够接收到超声波雷达发出的超声波信号,并将数据处理系统9模拟出来的虚拟目标信号发送回超声波雷达,收发变频器8能将收发天线5接收到的超声波信号变频到数据处理系统9能够处理的频率,并且将数据处理系统9模拟出来的虚拟目标信号变频到超声波雷达的工作频率。超声波是一种机械振动模式,以纵波的方式在弹性介质中传播,具有频率f、传播速度c与波长λ三个物理量,三个物理量具有如下关系:
f=c/λ
超声波的频率f大于20KHz,收发变频器8将交变电信号转化为频率大于20KHz的声信号。
长距超声波雷达4和短距超声波雷达3与数据处理系统9通过CAN总线连接,长距超声波雷达4和短距超声波雷达3能够发送超声波信号并接收收发天线5发出的超声波信号。
为避免超声波雷达反射超声波对超声波回波造成干扰,使八个短距超声波雷达3和四个长距超声波雷达4均位于同一个圆的圆周上。为使收发天线5发出的超声波回波能被超声波雷达接收,同时超声波雷达发出的超声波能被收发天线5接收,使六个收发天线5均位于同一个圆的圆周上,且此圆的圆周直径大于超声波雷达所在圆的圆周直径。
超声波在空气中,波束形状在近场区和远场区内不同,在近场区的波源线上会出现一系列声压极大极小值,波源线上最后一个声压极大值处至波源的距离称为近场区长度,用N表示。近场区声压有剧烈的起伏变化,存在着许多声压为极小值的节点。这些节点可引起探测的盲点。在远场区声强的变化趋于平稳,随着距离的增加,单调递减。因此收发天线位于的圆的圆周半径与超声波雷达所在圆的圆周半径之差应大于近场区长度N,所述近场区长度N应满足:
其中D为超声波雷达辐射面直径。
数据处理系统9根据收发天线传来的超声波信号,结合仿真软件内部设定的障碍物信息以及车辆动力学模型的相关参数,实时输出虚拟的超声波回波信号。超声在空气中传播时存在衰减现象,其强度、压强幅度、振幅都随着距离的增大而按指数规律下降,数据处理系统在模拟超声波回波信号时应满足:
其中,I为声波强度,p为压强幅度,A为振幅,α代表介质弹性磨擦吸收系数;β代表介质粘滞性与热传导系数;γ代表介质内散射体的瑞利散射吸收系数;x为超声波传播的距离。
当数据处理系统9中虚拟仿真软件中障碍物和主车相对运动时,会发生多普勒频移,即超声波雷达实际接收的超声波频率与真实源超声波频率不同,收发天线发射的超声波回波应满足多普勒频移现象,具体如下:
其中,Δf为频移值,v为声源与接收体之间的相对运动速度,θ为超声波的入射方向与目标运动方向之间的夹角。
数据处理系统9根据车辆动力学模型的车身姿态角实时控制旋转平台2旋转同样的角度,可以直观监测自动泊车算法的运行情况。
数据处理系统9控制十二个超声波雷达依次发射超声波脉冲,每个长距超声波雷达4都单独对应一个收发天线5,其余八个短距超声波雷达3分为两组,每一组包含四个短距超声波雷达3,每一组的四个短距超声波雷达3对应一个收发天线5,当一个超声波雷达发射出超声波脉冲后,多余超声波都被吸波暗箱7吸收,只有小部分被对应的收发天线5接收到并被传递到收发变频器8,收发变频器8将接收到的超声波信号变频为数据处理系统9能够处理的信号并传递给数据处理系统9,数据处理系统9根据接收到的超声波信号结合虚拟仿真软件中障碍物和主车的相对距离、相对速度、相对方位角、障碍物形状信息和主车上超声波雷达的安装位置,生成一个包含主车与障碍物的相对距离、相对速度的虚拟目标信号并传递给收发变频器8,收发变频器8将接收到的虚拟目标信号变频为超声波信号并通过收发天线5发出,被相应超声波雷达接收。当一个超声波雷达的收发完成后,下一个超声波雷达开始工作,重复上述流程,直至十二个超声波雷达遍历上述流程,数据处理系统9根据得到的十二组虚拟超声波信号,进行数据融合,得出虚拟车辆模型周围的障碍物信息并发送到自动泊车控制算法中,自动泊车算法运行时,数据处理系统9记录虚拟车辆的车身横摆角,并根据车身横摆角控制步进电机6,使得旋转平台2的旋转角实时跟踪虚拟车辆的车身横摆角。随着自动泊车算法的不断运行,虚拟车辆和障碍物的相对位置不断发生变化,收发天线5发出的虚拟回波信号也不断更新,从而使整个测试流程形成闭环,可以用来测试超声波雷达的性能以及算法的可靠性。
- 车载超声波雷达硬件在环测试试验台
- 一种基于汽车转毂试验台的毫米波雷达硬件在环测试台架