一种直升机主减速器转速振动数据同步与融合方法
文献发布时间:2023-06-19 09:46:20
技术领域
本发明属于直升机振动监测技术领域,具体涉及一种直升机主减速器转速、振动数据同步与融合方法,用于直升机主减速器振动告警、故障诊断,便于后期时域同步平均、整周期等相位FFT、扭振判定等功能。
背景技术
振动信号是反映主减速器工作状态的重要信号之一,振动信号包含了系统大量的运行状态信息;转速信号是主减速器内部齿轮、轴承转动频率的关键指标。目前,采集分析振动信号是诊断主减速器故障的一种有效方法,绝大多数主减速器方面的故障都与振动信号有密切的关系。因此,主减速器振动监测是状态监控与故障诊断的一项重要内容。通过多个振动传感器及转速传感器,可以采集到主减速器的各种振动信号与转速信号,通过对振动信号的振幅、振动烈度、相位等参数的实时检测,结合转速信号的特征,可实时监测主减速器的运转情况,避免大事故发生给企业造成损失。
传统的振动信号与转速信号同步方法包括以下两种:
1、将一段时间T内的振动信号原始数据、转速数字信号平均值、转速数字信号最大值、转速数字信号最小值组包,每隔时间段T构成新的振动、转速数据包,满足振动、转速信号的同步要求;
2、将振动信号原始数据、转速原始数据都通过AD采集器同步采集,并组包,每隔时间段T构成新的振动、转速数据包,满足振动、转速信号的同步要求。
第一种方法无法完整记录转速信号变换信息,仅记录了最值和平均值,在转速波动时,无法为后续的等相位插值拟合提供准确信息,同步精度较低;第二种方法记录大量转速数据,特别是对于主减速器,有多个转速信号时,要分析和记录的数据量大幅度增加,因此方法二不适合于机载电子产品,常用在地面实验室分析处理过程中。
发明内容
本发明针对现有的两种方法存在的:因无法完整记录转速信号变换信息,导致同步精度低以及因分析和记录的数据量大,不适合于机载电子产品的问题,本发明结合机载HUMS电子产品架构、主减速器振动采样频率高、相应转速频率低的特点,提出了一种适合直升机载电子产品的主减速器转速振动数据同步与融合方法及系统,解决现有方法无法较有效、简单、方便的将振动和转速信号同步、融合的问题。
利用FPGA在转速上升沿时刻标记振动信号对应位,利用主减速器振动信号采样频率固定且频率高,旋翼转速、尾桨转速和动力涡轮转速低的特征,将振动和转速信号实时同步、融合,简单易于实现,没有增加机载数据量,也没有遗漏转速实时变换特征,非常有利于后期振动信号的特征提取。
为了实现上述目的,本发明的技术方案如下:
一种直升机主减速器转速振动数据同步与融合方法,其特殊之处在于,包括以下步骤:
步骤1、信号采集;
采集n路振动信号及n路转速信号;其中n为大于等于1的正整数;
步骤2、信号转换;
将n路振动信号分别转化为振动电压信号;将n路转速信号分别转化为转速方波信号;
步骤3、利用转速信号标记振动信号;
步骤3.1、利用n路模数转换单元分别将n路振动电压信号分别转化为数字信号;
步骤3.2、FPGA控制n路振动信号模数转换单元的采集启动时刻、数据读取顺序以及数据缓存序列;同步采集n路振动数字信号及n路转速方波信号;
步骤3.3、FPGA捕获每一个转速方波信号上升沿或下降沿,同时,将此时刻n路振动数字信号的对应位全部标记为“1”;将每一个转速方波信号非上升沿或下降沿时刻的n路振动数字信号的对应位标记为“0”;
步骤4、获取标记后的n路振动数字信号,根据任一路振动数字信号标记位数据间隔点数M,计算转速N=Fs/M,其中Fs为振动数字信号采样频率。同时判断出转速变化情况;且多路振动信号能够根据相同转速的标记位对齐,能够实现多路振动信号同步。
进一步地,步骤3.2中,FPGA通过控制n路模数转换单元引脚CONVST电平同时变换,实现n路振动数字信号的同步采集。
进一步地,Fs大于20KHz,转速N不大于400Hz。
进一步地,步骤3.3中使用50MHz晶振信号捕获每一个转速方波信号上升沿或下降沿。
本发明还提供一种直升机主减速器转速振动数据同步与融合系统,其特殊之处在于:包括n路振动信号调理电路、n路转速信号调理电路、模数转换单元及FPGA;
上述n路振动信号调理电路分别用于将n路振动信号分别转化为振动电压信号;
上述n路转速信号调理电路分别用于将n路转速信号分别转化为转速方波信号;
上述模数转换单元包括n个模数转换器,用于将n路振动电压信号转化为数字信号;
FPGA用于控制n个模数转换器采集启动时刻、数据读取顺序以及数据缓存序列,同步采集n路振动数字信号及n路转速方波信号;并捕获每一个转速方波信号上升沿或下降沿,同时,将此时刻n路振动数字信号的对应位全部标记为“1”;将每一个转速方波信号非上升沿或下降沿时刻的n路振动数字信号对应位标记为“0”。
本发明的有益效果是:
本发明相比较于传统的方法,在已有的机载HUMS产品架构不变情况下,利用FPGA同时控制振动信号A/D采集、转速采集的特点,在FPGA内部捕获转速信号上升沿(或下降沿),捕获到上升沿(或下降沿)的同时,将此时刻多路振动信号A/D采集结果的数字信号对应位标记为“1”,非上升沿时刻的振动信号A/D采集结果的数字信号对应位标记为“0”,由于主减速器振动信号采样频率固定且频率高(一般为100KHz),而旋翼转速、尾桨转速和动力涡轮转速低(400Hz)的特征,因此通过振动信号对应位为“1”的间隔点数,就能获取实际转速值,且误差较小,本方法将转速信号和振动信号实时同步、融合,简单易于实现,没有增加机载数据量,也没有遗漏转速实时变换特征,非常有利于后期振动信号的特征提取。
附图说明
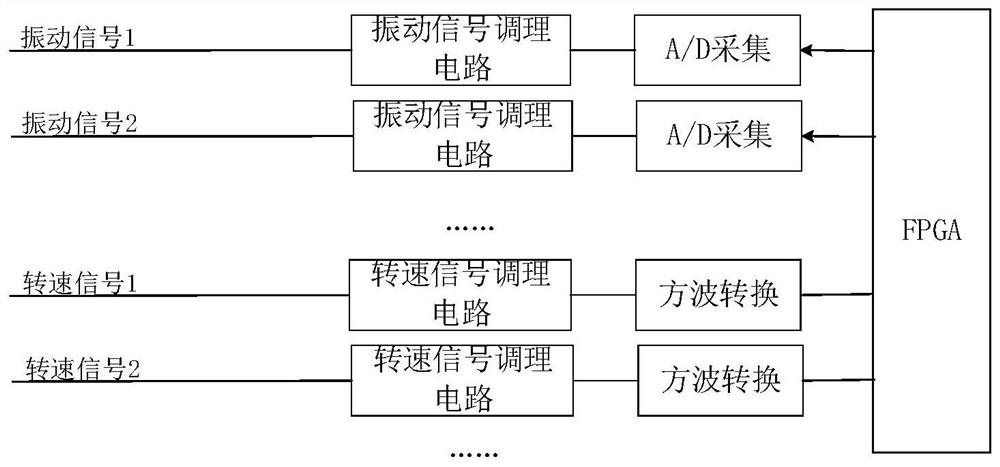
图1是直升机主减速器转速振动数据同步与融合系统框图;
图2是转速信号上升沿示意图;
图3是FPGA内部转速沿时刻标记振动信号流程示意图。
具体实施方式
下面结合附图和具体实施例对本发明做进一步说明:
如图1,本实施例直升机主减速器转速振动数据同步与融合系统,包括n路振动信号调理电路、n路转速信号调理电路、模数转换单元及FPGA;振动信号调理电路将n路振动信号分别转化为振动电压信号;转速信号调理电路将n路转速信号分别转化为转速方波信号;模数转换单元包括n个模数转换器,将n路振动电压信号转化为数字信号;FPGA控制n个模数转换器采集启动时刻、数据读取顺序以及数据缓存序列,同步采集n路振动数字信号及n路转速方波信号;并捕获每一个转速方波信号上升沿或下降沿,同时,将此时刻n路振动数字信号的对应位全部标记为“1”;将每一个转速方波信号非上升沿或下降沿时刻的n路振动数字信号对应位标记为“0”。
具体通过下述过程实现转速振动数据同步与融合:
步骤1、信号采集;
采集n路振动信号及n路转速信号;其中n为大于等于1的正整数;
步骤2、信号转换;
将n路振动信号分别转化为振动电压信号;将n路转速信号分别转化为转速方波信号;
步骤3、利用转速信号标记振动信号;
步骤3.1、利用n路模数转换单元分别将n路振动电压信号分别转化为数字信号;
步骤3.2、FPGA控制n路振动信号模数转换单元的采集启动时刻、数据读取顺序以及数据缓存序列;同步采集n路振动数字信号及n路转速方波信号;可通过控制n路模数转换单元引脚CONVST电平同时变换,实现n路振动数字信号的同步采集。
步骤3.3、如图2及图3,FPGA捕获每一个转速方波信号上升沿或下降沿,同时,将此时刻n路振动数字信号的对应位全部标记为“1”;将每一个转速方波信号非上升沿或下降沿时刻的n路振动数字信号的对应位标记为“0”;本实施例使用50MHz晶振信号捕获每一个转速方波信号上升沿或下降沿。也可使用其他信号捕获器件实现。
步骤4、获取标记后的n路振动数字信号,根据任一路振动数字信号标记位数据间隔点数M,计算转速N=Fs/M,其中Fs为振动数字信号采样频率。同时判断出转速变化情况;且多路振动信号能够根据相同转速的标记位对齐,能够实现多路振动信号同步。
本实施例一片FPGA控制多路振动信号模数转换(控制采集启动时刻、数据读取顺序)、数据缓存,且振动采样频率Fs大于20KHz,控制多路转速信号边沿捕获,且转速频率N不大于400Hz。
以某直升机主减速器转速振动数据为例进行说明。
某直升机主减速器有3路转速传感器,分别为N1、N2、N3,3路振动传感器,分别为ZD1、ZD2、ZD3;
机载电子产品采集3路转速和3路振动信号,使用转速信号调理电路将转速信号转换为方波信号,其中转速信号调理电路为常规电路,包括滤波、整形和滞回比较等电路;使用振动信号调理电路将振动信号转换为适合A/D采集的电压信号;其中振动信号调理电路也为常规电路,包括滤波、放大等电路。A/D采集将振动电压信号转化为振动数字信号。
机载电子产品使用FPGA采集振动数字信号和转速方波信号,其中振动数字信号采样频率Fs=100KHz,使用50MHz晶振信号实现转速方波信号上升沿捕获。
共使用3片12位A/D芯片AD7892,FPGA通过控制3路AD7892引脚CONVST电平同时变换实现3路振动信号同步采集;FPGA内部3路振动信号存储FIFO大小为8KB;N1、N2、N3每转一圈一个上升沿,定义3路振动信号ZD1、ZD2、ZD3每个数据标记位如表1、表2与表3所示。
表1振动信号ZD1的每个数据标记位
表2振动信号ZD2的每个数据标记位
表3振动信号ZD3的每个数据标记位
FPGA捕获N1、N2、N3对应方波信号上升沿,当检测到N1转速信号上升沿的同时,将此时刻ZD1、ZD2、ZD3的数字信号对应B14位全部标记为“1”,未检测到上升沿时刻标记B14位为“0”,循环持续进行标记;N2和N3上升沿标记方法和N1相同,最后振动数据中都被标记了N1、N2、N3对应上升沿时刻和非上升沿时刻。
软件获取FPGA中FIFO内标记后的ZD1、ZD2、ZD3的数据,可根据ZD1、ZD2、ZD3任一路振动数据B14位为“1”的振动数据间隔点M,计算转速N=Fs/M(Fs=100KHz),同时根据连续的间隔点M1、M2等,判断出转速变化情况,如果M1=M2=……,即间隔点相等,则转速稳定,否则转速连续变换波动;B12、B13标记位使用原理相同。
软件轮询获取FPGA中FIFO内标记后的ZD1、ZD2、ZD3的数据,将ZD1、ZD2、ZD3根据B14标记位为“1”起始对齐,能够实现振动信号同步,B12、B13标记位使用原理相同。
本方法将转速信号和振动信号实时同步、融合,简单易于实现,没有增加机载数据量,也没有遗漏转速实时变换特征,非常有利于后期振动信号的特征提取。
- 一种直升机主减速器转速振动数据同步与融合方法
- 基于观测器的直升机主减速器振动特征阈值设置方法