多旋翼无人飞行器举升机架
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及飞行器技术领域,具体涉及一种多旋翼无人飞行器举升机架。
背景技术
纵观世界,目前国内外研发的无人飞行器百花齐放百家争鸣,而适用于载人和载货的无人飞行器,普遍存在以下问题:一、受现有无人飞行器机架和机臂的结构限制,现有载货无人飞行器的货物普遍吊装在无人飞行器机架的下面,有直接裸露吊装在无人飞行器机架下面的设计,也有在无人飞行器机架下面设计一个封闭式的箱体用于装载货物的设计,还有将货物捆绑在无人飞行器机架上面或下面的设计,而现有载人无人飞行器也没有打破现有无人飞行器机架和机臂的结构限制;二、现有无人飞行器机架中间没有设置环状舱体托架,没有设置载人(载货)舱的位置;三、现有无人飞行器其旋翼外侧普遍没有设置导流筒罩,四、现有无人飞行器设计复杂、价格昂贵。
总之,受现有无人飞行器机架和机臂的结构限制,不方便设置载人(载货)舱,而本发明无人飞行器举升机架,具有方便设置载人(载货)舱、能量转化率高、结构简单、经济实用的优势,是未来多旋翼载人(载货)飞行器发展的方向。
发明内容
针对现有技术中的缺陷,本发明提供一种多旋翼无人飞行器举升机架,其具有方便设置载人(载货)舱、能量转化率高、结构简单、经济实用的优势。
一种多旋翼无人飞行器举升机架,包括舱体托架、举升旋翼、动力设备、支撑臂以及导流筒罩;
所述舱体托架的中间是设置载人(载货)舱的位置,所述举升旋翼设置有多个,并列周向分布于所述舱体托架的四周,每个所述举升旋翼的下端分别设置有驱动所述举升旋翼运转的动力设备,所述动力设备通过支撑臂固定在所述舱体托架对应的外壁,所述举升旋翼外竖向设置有导流筒罩。
进一步,所述舱体托架的中间是设置载人(载货)舱的位置,舱体托架为环状平面结构,其实施例1的舱体托架为圆形环状平面结构,或实施例2的舱体托架为椭圆形环状平面结构,或实施例3的舱体托架为正方形环状平面结构,其舱体托架的平面结构可以设计成多种形式。
进一步,所述举升旋翼外竖向设置有导流筒罩,导流筒罩固定在舱体托架的外缘,导流筒罩之间紧密相连相互固定。
进一步,各个所述举升旋翼并列周向分布于所述舱体托架的四周,除了有碍设置舱门的地方,都可以设置举升旋翼以增加举升动力。
进一步,所述动力设备均采用发动机或电动机。
进一步,所述动力设备均采用发动机时,动力源为燃油;所述动力设备均采用电动机时,动力源为蓄电池组。
进一步,所述动力设备的支撑臂可以采用多种形式与导流筒罩相固定。
进一步,所述举升旋翼的导流筒罩沿气流方向的长度可以根据需要通过计算确定,随着导流筒罩沿气流方向的长度加长,导流筒罩从而形成气流涵道有利于气流产生更强的推力。
进一步,所述举升旋翼的旋翼数量可以根据需要设计为单组、双组或多组,多组旋翼通过同轴叠加旋转如同喷气式飞机的发动机转子一样有利于气流产生更强的推力。
本发明的有益效果体现在:
1、与现有无人飞行器机架相比,本发明的舱体托架中间是设置载人(载货)舱的位置,可以在舱体托架的中间设置一个封闭式的载人(载货)舱用于载人和载货。本设计打破了现有无人飞行器机架和机臂的结构限制,可以实现无人飞行器载人和载货。
2、与现有无人飞行器机架相比,本发明的举升旋翼外竖向设置有导流筒罩,以提升举升旋翼运转产生的动力聚集程度,从而提升动力源的能量利用率,也可以起到保护举升旋翼的作用。
3、与现有无人飞行器机架相比,本发明的举升旋翼外竖向设置有导流筒罩,导流筒罩固定在舱体托架的外缘,导流筒罩之间紧密相连相互固定,从而可以实现飞行器在相对较小的占地投影面积的情况下获得相对较大的举升动力。
4、与现有无人飞行器机架相比,本发明动力设备的支撑臂可以采用多种形式与导流筒罩相固定,从而可以增加动力设备的稳定性。
5、与现有无人飞行器机架相比,本发明结构简单,成本较低。
综上所述,本发明无人飞行器举升机架,具有方便设置载人(载货)舱、能量转化率高、结构简单、经济实用的优势,是未来多旋翼载人(载货)飞行器发展的方向。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
图1为实施例1的主视图;
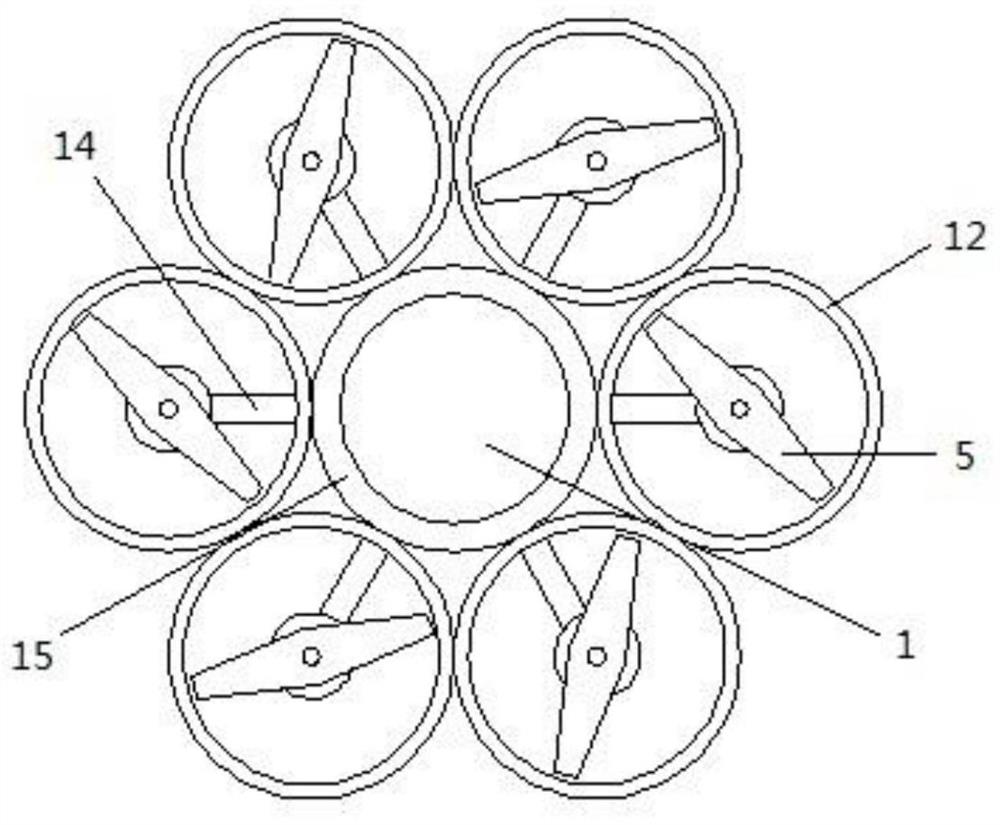
图2为实施例1的俯视图;
图3为实施例1的侧视图;
图4为实施例2的主视图;
图5为实施例2的俯视图;
图6为实施例2的侧视图;
图7为实施例3的主视图;
图8为实施例3的俯视图;
图9为实施例3的侧视图;
为了与本申请人已申请相关飞行器专利中的编号相对应,附图中标注的编号不连续,设置载人(载货)舱的位置1、举升旋翼5、动力设备6、导流筒罩12、支撑臂14、舱体托架15。
具体实施方式
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
实施例1
如图1、图2和图3所示,一种多旋翼无人飞行器举升机架,包括舱体托架15、举升旋翼5、动力设备6、支撑臂14以及导流筒罩12;
所述舱体托架15的中间是设置载人(载货)舱的位置1,所述举升旋翼5设置有六个,并列周向分布于所述舱体托架15的四周,每个所述举升旋翼5的下端分别设置有驱动所述举升旋翼5运转的动力设备6,所述动力设备6通过支撑臂14固定在所述舱体托架15对应的外壁,所述举升旋翼5外竖向设置有导流筒罩12。
具体的,所述舱体托架15的中间是设置载人(载货)舱的位置1,其舱体托架15为圆形环状平面结构。
具体的,所述举升旋翼5外竖向设置有导流筒罩12,导流筒罩12固定在舱体托架15的外缘,导流筒罩12之间紧密相连相互固定。
具体的,所述动力设备6均采用电动机,动力源为蓄电池组。
实施例2
如图4、图5和图6所示,与实施例1的区别在于:
所述舱体托架15的中间是设置载人(载货)舱的位置1,所述举升旋翼5设置有十个。
具体的,所述舱体托架15的中间是设置载人(载货)舱的位置1,其舱体托架15为椭圆形环状平面结构。
具体的,所述动力设备6均采用发动机,动力源为燃油。
实施例3
如图7、图8和图9所示,与实施例1的区别在于:
所述舱体托架15的中间是设置载人(载货)舱的位置1,所述举升旋翼5设置有十六个。
具体的,所述舱体托架15的中间是设置载人(载货)舱的位置1,其舱体托架15为正方形环状平面结构。
具体的,所述动力设备6均采用发动机,动力源为燃油。
实施例1、实施例2和实施例3的工作原理:
本发明多旋翼无人飞行器举升机架同现有无人飞行器机架的工作原理相一致,本发明飞行器由自动飞行程序操控飞行,飞行器飞行原理同现有无人飞行器的飞行原理相一致。由于本发明飞行器举升机架中间设置了舱体托架,所以将本发明飞行器的控制设备和动力源设置在载人(载货)舱的底部、顶部或其他位置。
本发明通过在舱体托架中间设置载人(载货)舱,从而打破了现有无人飞行器机架和机臂的结构限制,从而可以实现无人飞行器载人和载货;通过在举升旋翼外竖向设置导流筒罩,可以提升举升旋翼运转产生的动力聚集程度,从而可以提升动力源的能量利用率,也可以起到保护举升旋翼的作用;通过在举升旋翼外竖向设置导流筒罩,导流筒罩固定在舱体托架的外缘,导流筒罩之间紧密相连相互固定,从而可以实现飞行器在相对较小的占地投影面积的情况下获得相对较大的举升动力;通过动力设备的支撑臂采用多种形式与导流筒罩相固定,从而可以增加动力设备的稳定性。
本发明的舱体托架也可以设计成立体结构,如桶状、盒状或筒状等多种立体结构。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的保护范围当中。
- 多旋翼无人飞行器举升机架
- 一种无人飞行器机架的旋翼及模块化的多旋翼机架