无人飞行器发动机的控制系统
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及无人飞行器的控制系统,尤其涉及一种无人飞行器发动机的控制系统。
背景技术
随着无人机发展,对发动机的控制提出了更高的要求。无人机启动发动机启动时可通过发射架发射、垂直发射、抛射发射等,其中在发射后,在飞行的转向中,位于发动机尾部的舵系统起到重要作用,舵系统主要由舵片驱动电机、舵片组成。目前,涡喷推进式无人机采用一个发动机配置四个舵片的结构,每一个舵片由一个电机控制,以保障无人机的运动的灵活性,舵片的材料一般为耐熔金属、陶瓷及其氧化物、硼化物、碳化物,以及石墨和碳的产物等,价格较为昂贵。
发明内容
本发明的目的是提供一种具有较高灵活性能的同时成本更低廉的无人飞行器发动机的控制系统。
为了实现上述目的,本申请提供了无人飞行器发动机的控制系统,包括:
主控系统,所述主控系统包含处理模块、反馈信号接收模块和控制平台通信模块,所述处理模块根据反馈信号接收模块接收到的反馈信号和控制平台通信模块接收的控制信号生成控制指令;
推进系统,所述推进系统包含涡喷推进单元,所述涡喷推进单元主要由两个发动机和与每个发动机相应的发动机控制电路所组成,所述发动机控制电路根据所述飞行控制指令中的相关指令控制对应发动机运行;
舵系统,所述舵系统包含舵机,所述舵机主要由舵片和相应的舵片驱动电机、舵片驱动传动机构和舵片驱动控制电路所组成,所述舵片驱动控制电路根据所述无人飞行器飞行控制指令中的相关指令控制对应一个舵片驱动电机运行并通过舵片驱动传动机构使对应舵片转动;
反馈系统,所述反馈系统包含用于获得生成所述飞行控制指令所需的飞行状况的传感器,所述传感器将获得的检测信号作为所述反馈信号发送至所述反馈信号接收模块并通过该反馈信号接收模块发送至处理模块进行处理;
所述舵片的旋转轴以垂直于无人飞行器发动机尾部中轴线的方式布置且任意相邻两个舵片旋转轴之间的夹角为90°;每个发动机上分别配置三个舵片,使两发动机的舵片的布局相对于两发动机之间的中线对称。
采用本无人飞行器发动机的控制系统可依然在拥有较高的灵活性的前提下,同时相比于双发动机配置八个舵片而言,价格更加低廉。
进一步地是,所述舵片到发动机的喷管之间的距离为2mm~150mm。本无人飞行器发动机的控制系统的舵片与喷管的距离控制在2mm~150mm即具有很高的灵活性。
进一步地是,一个所述发动机上布置两个舵片驱动电机,所述传感器分别与该两个舵片驱动电机的舵片驱动控制电路电性连接;两个舵片驱动电机中的一个舵片驱动电机布置于发动机侧方朝外的一侧。设置在外侧的舵片驱动电机单独控制位于侧方的一个舵片。一个所述发动机上布置两个舵片驱动电机,这里即一个发动机对应配置两个舵片驱动电机。当设置双发动机时,即两个发动机上的每一个发动机均配置两个舵片驱动电机。
进一步地是,一个所述发动机上的一个所述舵片驱动电机通过舵片驱动传动机构传动连接三个舵片中相对的两个舵片,用于使该舵片驱动电机对三个舵片中相对的两个舵片进行同时控制。这里相对的两个舵片,即方向相向、指向相反且正对的两个舵片。
进一步地是,所述舵片驱动传动机构中包含同时控制所述两个舵片的弯折杆,该弯折杆布置于两个发动机之间,该弯折杆与位于外侧的另一个舵片相对设置,这样也同时防止弯折杆对舵片的转动进行干涉。
进一步地是,所述无人飞行器发动机的控制系统还包含一个将两个发动机连接的前固定支架,该前固定支架包含用于分别套装在两个发动机上的两个卡箍和用于连接两个卡箍的连接架,所述连接架两侧设置有卡槽,所述卡箍嵌入于该卡槽中并通过螺栓固定。
进一步地是,所述卡箍套装于发动机的前段;所述无人飞行器发动机的控制系统还包含靠近喷管、位于发动机后段的后固定支架,所述后固定支架包含两个用于套装发动机后段的套环;所述发动机的外壳上固定设置有外架,所述后固定支架通过外架与所述前固定支架连接。
这样后固定支架与前固定支架形成一个稳固的、锁紧两个发动机的框架,保障在给舵系统提供完整的支撑的同时,保障双发动机之间具有十分稳固的相对位置关系。
进一步地是,所述舵片通过舵片固定架与所述套环连接;所述套环上排布有与舵片位置相对的三组舵片固定架安装孔,所述舵片固定架通过穿设于舵片固定架安装孔的螺栓与套环连接。
进一步地是,所述卡箍包含外箍和内箍两半,该外箍的两端分别与内箍两端对接形成一圈卡箍,所述内箍与连接架连接;布置于发动机侧方朝外的一侧的舵片驱动电机固定于所述外箍上,另一个舵片驱动电机固定于所述内箍上。
进一步地是,所述内箍的两端分别为固定舵片驱动电机的基座,所述传感器设置于该基座上;所述基座向前固定支架方向延伸,所述前固定支架通过该基座与后固定支架连接。
下面结合附图和具体实施方式对本发明做进一步的说明。本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
构成本发明的一部分的附图用来辅助对本发明的理解,附图中所提供的内容及其在本发明中有关的说明可用于解释本发明,但不构成对本发明的不当限定。在附图中:
图1为用于说明实施方式中的无人飞行器发动机的控制系统原理示意图;
图2为用于说明实施方式中的无人飞行器发动机的控制系统整体的上斜视结构示意图;
图3为用于说明实施方式中的无人飞行器发动机的控制系统用于凸显舵片部分的示意图;
图4为图3中的A处的局部示意图;
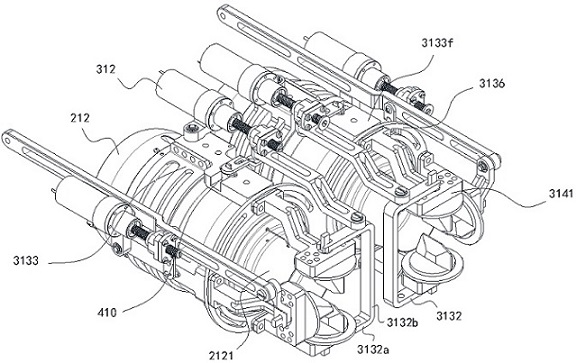
图5为用于说明实施方式中的无人飞行器发动机的控制系统整体的下斜视结构示意图;
图6为用于说明实施方式中的无人飞行器发动机的控制系统俯视结构示意图。
图中标记:100-主控系统;110-处理模块;120-反馈信号接收模块;130-控制平台通信模块;200-推进系统;210-涡喷推进单元;211-发动机控制电路;212-发动机;2121-喷管;210-涡喷推进单元;300-舵系统;310-舵机;311-舵片驱动控制电路;312-舵片驱动电机;313-舵片驱动传动机构;3132-弯折杆;3132a-弯折杆的端部杆;3132b-弯折杆的连接杆;3133-前固定支架;3133c-连接架;3133d-卡箍的外箍;3133e-卡箍的内箍;3133f-基座;3136-套环;314-舵片;3141-舵片固定架;400-反馈系统;410-角位移传感器;420-磁阻传感器;430-气压传感器;440-空速传感器;450-GPS传感器;460-超声测距模块;470-视觉传感器;480-惯性测量单元。
具体实施方式
下面结合附图对本发明进行清楚、完整的说明。本领域普通技术人员在基于这些说明的情况下将能够实现本发明。在结合附图对本发明进行说明前,需要特别指出的是:
本发明中在包括下述说明在内的各部分中所提供的技术方案和技术特征,在不冲突的情况下,这些技术方案和技术特征可以相互组合。
此外,下述说明中涉及到的本发明的实施例通常仅是本发明一部分的实施例,而不是全部的实施例。因此,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
关于本发明中术语和单位。本发明的说明书和权利要求书及有关的部分中的术语“包括”以及它的任何变形,意图在于覆盖不排他的包含。
参照图1至图6。
如图1,本实施方式采用双发动机212的无人飞行器发动机212的控制系统进行实施方式说明,本无人飞行器发动机212的控制系统,包括主控系统100、推进系统200、舵系统300和反馈系统400。
所述主控系统100包含处理模块110、反馈信号接收模块120和控制平台通信模块130,所述处理模块110根据反馈信号接收模块120接收到的反馈信号和/或控制平台通信模块130接收的控制信号生成飞行控制指令。
处理模块110可以采用满足使用要求的各种市售控制器。所述控制平台通信模块130可以采用无线通信装置与反馈系统400进行无线通信。
推进系统200包含涡喷推进单元210,所述涡喷推进单元210主要由一个发动机212和相应的发动机控制电路211所组成,所述发动机控制电路211根据所述飞行控制指令中的相关指令控制对应一个发动机212运行。
所述舵系统300包含舵机310,所述舵机310主要由一个舵片314和相应的舵片驱动电机312、舵片驱动传动机构313和舵片驱动控制电路311所组成,所述舵片驱动控制电路311根据所述无人飞行器飞行控制指令中的相关指令控制对应一个舵片驱动电机312运行并通过舵片驱动传动机构313使对应一个舵片314转动。
所述反馈系统400包含用于获得生成所述飞行控制指令所需的飞行状况的传感器,所述传感器将获得的测量信号作为所述反馈信号发送至所述反馈信号接收模块120并通过该反馈信号接收模块120发送至处理模块110进行处理;
上述的反馈系统400的传感器包含有角位移传感器410,除了角位移传感器410以外,该反馈系统400的传感器还可以包含磁阻传感器420、气压传感器430、空速传感器440、GPS传感器450、超声测距模块460、视觉传感器470和惯性测量单元480中的至少一种。舵片驱动传动机构313与角位移传感器410连接,舵片驱动控制电路311通过舵片驱动传动机构313驱动舵片314时,角位移传感器41接收到舵片314的转动信息,即经过舵片驱动传动机构313同步接收舵片314转动信息。
如图2、图3和图4,所述舵片314的旋转轴以垂直于无人飞行器发动机212尾部中轴线的方式布置且任意相邻两个舵片旋转轴之间的夹角为90°;每个发动机212上分别配置三个舵片,使两发动机212的舵片314的布局相对于两发动机212之间的中线对称。采用每个发动机212配置一组三个舵片的且让两组舵片314对称布置的方式,相较于传统的采用四个舵片314的形式,本无人飞行器发动机212的控制系统的每个发动机212配置三个舵片,使在每一个舵片314所在的平面中均有另一个舵片与其对应,即每一个平面均两两成对。本无人飞行器发动机212的控制系统可依然在拥有较高的灵活性的前提下,同时相比于双发动机212配置八个舵片314而言,价格更加低廉。
舵片314到发动机212的喷管2121之间的距离为2mm~150mm,本实施例采用2mm布置。本无人飞行器发动机212的控制系统的舵片314与喷管2121的距离控制在2mm~150mm即具有很高的灵活性。这里的舵片314所在的平面之间相交的部分形成的直线与喷管2121的中心轴线一致,一个发动机212上的舵片314到该发动机喷管2121的中心轴线的距离均相同。
一个所述发动机212上布置两个舵片驱动电机312,所述传感器分别与该两个舵片驱动电机312的舵片驱动控制电路311电性连接;两个舵片驱动电机312中的一个舵片驱动电机312布置于发动机212侧方朝外的一侧。设置在外侧的舵片驱动电机312单独控制位于侧方的一个舵片314。
一个发动机212上的一个所述舵片驱动电机312通过舵片驱动传动机构313传动连接三个舵片中相对的两个舵片,用于使该舵片驱动电机312对三个舵片中相对的两个舵片进行同时控制。
舵片驱动传动机构313中包含同时控制所述两个舵片的弯折杆3132,该弯折杆3132布置于两个发动机212之间,该弯折杆3132与位于外侧的另一个舵片相对设置,这样也同时防止弯折杆3132对舵片314的转动进行干涉。即弯折杆3132由两段平行的端部杆3132a和连接该端部杆3132a的连接杆3132b组成,端部杆3132a与舵片314的旋转轴连接,舵片驱动电机312控制该弯折杆3132绕舵片314的旋转轴进行摆动,弯折杆3132的端部杆3132a带动舵片314的旋转轴以及舵片314转动。
无人飞行器发动机212的控制系统还包含一个前固定支架3133,该前固定支架3133包含分别用于套装在两个发动机212上的两个卡箍和用于对接两个卡箍的连接架3133c,所述连接架3133c两侧设置有卡槽,所述卡箍上排布有螺栓孔,该卡箍嵌入于该卡槽中并通过螺栓固定。这样采用可拆装的上述的前固定支架3133,在装配本双发动机212时,更为灵活方便,同时为了方便两个发动机212的装配定位准确,可以在上述的卡箍上与连接架3133c对应的位置设置供上述的螺栓穿设的定位孔进行定位。
卡箍套装于发动机212的前段;无人飞行器发动机212的控制系统还包含靠近喷管2121、位于发动机212后段的后固定支架,所述后固定支架包含两个用于套装发动机212后段的套环3136。后固定支架与前固定支架3133形成一个稳固的、锁紧两个发动机212的框架,即后固定支架、前固定支架3133和两个发动机212组成一个框架结构,十分稳固,保障在给舵系统提供完整的支撑的同时,保障双发动机212之间具有十分稳固的相对位置关系。
舵片314通过舵片固定架3141与所述套环3136连接;所述套环3136上排布有与舵片314位置相对的三组舵片固定架安装孔,所述舵片固定架3141通过穿设于舵片固定架安装孔的螺栓与套环3136连接。
参考图5和图6,卡箍包含外箍3133d和内箍3133e两半,该外箍3133d的两端分别与内箍3133e两端对接形成一圈卡箍,所述内箍3133e与连接架3133c连接,这里的内箍3133e和外箍3133d即为弧形的部件,这里的内箍3133e与外箍3133d在发动机212的轴向方向上延伸一定的宽度,除了使发动机212与卡箍的连接更加稳固以外,也为在卡箍上安装的部件提供更多的支撑节点;布置于发动机212侧方朝外的一侧的舵片驱动电机312固定于所述外箍3133d上,另一个舵片驱动电机312固定于所述内箍3133e上。所述内箍3133e的两端分别为固定舵片驱动电机312的基座3133f,所述传感器设置于该基座3133f上;所述基座3133f向前固定支架方向延伸,所述前固定支架通过该基座3133f与后固定支架连接。前述的外箍3133d的两端可以设置一板状的部件与前述的基座3133f通过螺栓连接。采用上述外箍3133d和内箍3133e的分体式的连接形式形成上述的卡箍,在装配舵系统时,可以先将舵系统、反馈系统中的相关部件安装于对应的外箍3133d和内箍3133e上,然后在将外箍3133d和内箍3133e对接,最后在对未装配连接部分完成装配,这样对整个发动机212上的部件的安装更加方便。
以上对本发明的有关内容进行了说明。本领域普通技术人员在基于这些说明的情况下将能够实现本发明。基于本发明的上述内容,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
- 无人飞行器发动机的控制系统
- 无人飞行器发动机的控制系统