一种航天器轨道转移的允许控制集合构建方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及航天领域的航天器轨道转移,具体涉及一种航天器轨道转移的允许控制集合构建方法。
背景技术
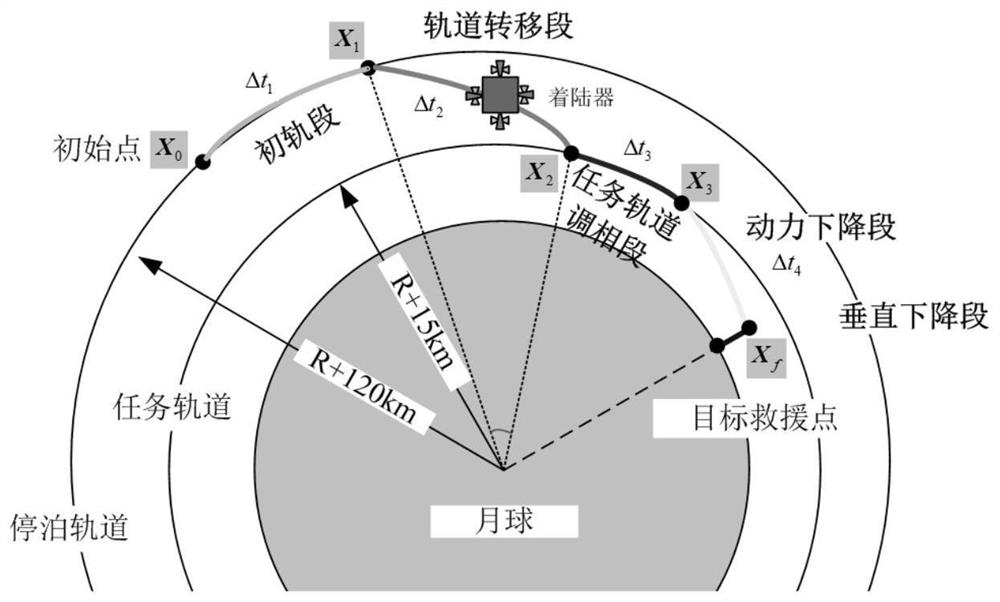
月面紧急救援是当宇航员在月面发生事故或故障时,通过预先部署在环月轨道上的救援航天器,通过变轨与轨道下降,软着着陆于待救援点投放救援物资和维修设备的过程。该任务分为五个阶段:初轨段,轨道转移段、任务轨道调相段、动力下降段和垂直下降段。
通常的航天器轨道转移仅考虑燃料或能量最优,郑博采用伪谱法获得了航天器轨道转移的燃料最优轨道,而月面紧急救援的任务通常需要时间最优,更为复杂的多阶段轨道转移任务的性能指标更为复杂。针对多阶段任务的全局优化方法目前有启发式智能优化方法和动态规划法。其中启发式算法存在算法设计难度大、易陷入局部最优解、算法复杂度高等特点,不易于在航天领域应用。经典的动态规划法本质上式一种搜索类算法,没有统一的形式且需较大的计算机储存空间。
发明内容
针对现有制导理论存在的问题:大多数仅针对单一阶段,只能进行局部优化,无法获得多阶段任务全过程的最优解的问题。本发明提供了一种面向月面紧急救援任务的航天器轨道转移的允许控制集合构建方法,用于构建各段的允许控制集合,从而采用动态规划法确定任务全程的最优轨迹。
本发明的技术方案是:
一种航天器轨道转移的允许控制集合构建方法,包括以下步骤:
S100,根据月面宇航员遭遇险情时发出的救援信号,确定待救援点和此时救援航天器在月心惯性系下的坐标;
S200,根据救援航天器在月心惯性系下的坐标的初末状态,使用初轨段、轨道转移段、任务轨道调相段、动力下降段和垂直下降段将初末状态连接,并在轨道转移段的初末时刻进行脉冲轨道转移控制;
S300,通过改变轨道倾角差、升交点赤经差、真近点角和给定转移时间的取值,利用脉冲轨道转移控制获得每种状态下达初末速度增量和燃料消耗,构建轨道转移段允许控制集合;
S400,救援航天器在任务轨道上运行一段时间后,到达动力下降段初始点,动力下降段的终点由待救援点确定,在给定动力下降段的初末状态,基于显式制导方法获得其下降段时间和每时刻需要施加的速度增量,构建动力下降段允许控制集合。
作为本发明的进一步改进,脉冲轨道转移控制具体为:
经过一段距离的无控初始轨道后,施加一次脉冲速度增量,使得航天器进入转移轨道,在转移轨道飞行一段时间后施加第二次脉冲速度增量,使得救援航天器进入任务轨道。
作为本发明的进一步改进,所述脉冲速度增量是在给定初始轨道与任务轨道的轨道根数和给定转移时间的情况下,采用二体问题下的Lambert算法求解。
作为本发明的进一步改进,所述动力下降段的初始轨道位置采用月球经纬度表示。
作为本发明的进一步改进,所述动力下降段允许控制集合为所有允许控制和其对应的初末状态构成的集合。
本发明与现有技术相比具有以下技术效果:
本发明采用构建允许控制集合的方法构建缩小了多阶段航天任务全局最优解的搜索范围,先获得了初始和终末的位置、速度。再根据初始状态获得所有可能的脉冲轨道转移控制量,根据所有可能的脉冲轨道转移控制量构建轨道转移段允许控制集合;构建动力下降的允许控制集合。使其不必在每种情况下都完整的计算一遍轨道的各阶段,在同等算力下降低了计算时间,易于在轨实时计算。采用构建允许控制集合的方法便于多阶段任务的离线计算,并可将允许控制集合作为预案,实现紧急状态下的制导律快速获取。
附图说明
图1为五阶段的月面紧急救援任务流程图;
图2为轨道转移段在一定任务轨道倾角和升交点赤经的情况下,改变进入任务轨道的真近点角和给定转移时间,转移段燃料消耗的变化规律;
图3-图5为轨道转移段允许控制集合(部分),其包含了不同任务轨道倾角、升交点差、真近点角和对应的最短转移时间;
图6为制动段允许控制集合(部分),其包含了动力下降段开始的救援航天器所在的月球经纬度和对应的最短下降时间。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下文中将结合附图对本发明的实施例进行详细说明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互任意组合。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
本发明的一种航天器轨道转移的允许控制集合构建方法,包括以下步骤:
步骤一:获得救援航天器的初始位置、速度与末时刻位置、速度
当月面宇航员遭遇险情时,根据发出的救援信号,确定待救援点和此时救援航天器在月心惯性系下的坐标,从而确定任务末时刻的航天器位置、速度。
步骤二:脉冲轨道转移控制的确定
根据步骤一获得月心惯性系下的坐标的初末状态,使用初轨段、轨道转移段、任务轨道调相段、动力下降段和垂直下降段将其连接。脉冲轨道转移控制发生在轨道转移段的初末时刻,具体为经过一段距离的无控初始轨道后,施加一次脉冲速度增量,使得航天器进入转移轨道,在转移轨道飞行一段时间后施加第二次脉冲速度增量,使得救援航天器进入任务轨道。上述过程可在给定初始轨道与任务轨道的轨道根数和给定转移时间的情况下,采用二体问题下的Lambert算法可求解两次脉冲增量。
步骤三:轨道转移段允许控制集合的构建
在步骤一中获得了救援航天器初始轨道,在步骤二中轨道转移段初始点的轨道六根数中的真近点角(φ)随救援航天器在初始轨道上的运动时间而变化,是一个不确定量。施加第二次脉冲时的任务轨道根数中的轨道倾角(i)、升交点赤经(Ω)、真近点角(φ)都是不确定量。本发明中实际上的转移轨道燃料消耗仅与转移初末时刻的轨道根数差有关,何其绝对量无关。通过改变轨道倾角差(Δi)、升交点赤经差(ΔΩ)、真近点角(Δφ)和给定转移时间(t
步骤四:动力下降段允许控制集合的构建
救援航天器在步骤二中的任务轨道上运行一段时间后,到达动力下降段初始点,动力下降段的终点由待救援点唯一确定。在给定动力下降段的初末状态,可基于显式制导方法获得其下降段时间和每时刻需要施加的速度增量。动力下降段的初始轨道根数是不确定的,其可以采用月球经纬度表示。本发明提出的动力下降段允许控制为满足动力下降段相关敏感器、推力器、安全性等约束的控制。动力下降段允许控制集合为所有允许控制和其对应的初末状态构成的集合。
以下结合具体实施例和附图对本发明的方法进项详细说明。
实施例
给定数值仿真初始条件为:月球引力常数μ=4903km
根据步骤一,确定任务全程的初始位置为(0°N,100°W),待救援点的终端位置为(10°N,20°E)。
根据步骤二、三,在给定的轨道转移段初末位置和转移时间下,采用Lambert算法,获得该段燃料消耗,如图2。在该具体实施过程中性能指标选为时间最短,采用上述方法构建允许控制集合,如图3-5。
根据步骤四,不断改变动力下降段初始点的月球经纬度,采用上述方法获得每种状态下的最短下降时间,在满足相关约束下构建的允许控制集合如图6。
以上披露的所有文章和参考资料,包括发明申请和出版物,出于各种目的通过援引结合于此。描述组合的术语“基本由…构成”应该包括所确定的元件、成分、部件或步骤以及实质上没有影响该组合的基本新颖特征的其他元件、成分、部件或步骤。使用术语“包含”或“包括”来描述这里的元件、成分、部件或步骤的组合也想到了基本由这些元件、成分、部件或步骤构成的实施方式。这里通过使用术语“可以”,旨在说明“可以”包括的所描述的任何属性都是可选的。
多个元件、成分、部件或步骤能够由单个集成元件、成分、部件或步骤来提供。另选地,单个集成元件、成分、部件或步骤可以被分成分离的多个元件、成分、部件或步骤。用来描述元件、成分、部件或步骤的公开“一”或“一个”并不说为了排除其他的元件、成分、部件或步骤。
应该理解,以上描述是为了进行图示说明而不是为了进行限制。通过阅读上述描述,在所提供的示例之外的许多实施例和许多应用对本领域技术人员来说都将是显而易见的。因此,本教导的范围不应该参照上述描述来确定,而是应该参照前述权利要求以及这些权利要求所拥有的等价物的全部范围来确定。出于全面之目的,所有文章和参考包括发明申请和公告的公开都通过参考结合在本文中。在前述权利要求中省略这里公开的主题的任何方面并不是为了放弃该主体内容,也不应该认为申请人没有将该主题考虑为所公开的发明主题的一部分。
- 一种航天器轨道转移的允许控制集合构建方法
- 一种航天器轨道转移的允许控制集合构建方法