一种多向姿态控制装置
文献发布时间:2023-06-19 09:49:27
技术领域
本发明属于浮空器领域,涉及一种多向姿态控制装置。
背景技术
在临近空间飞艇飞行过程中,控制飞艇姿态使其按照预定航迹飞行或机动是十分关键的环节。而调姿装置的运用对于飞艇实现抗风飞行及区域驻留等任务有着重大意义。现有的调姿装置主要为单一方向控制或复杂的矢量控制,其控制效率低、结构重量大,因而具有较小的工程应用价值。
鉴于现有调姿装置的诸多弊端,一种简洁高效的临近空间飞艇多向姿态控制装置就显得尤为重要。
发明内容
本发明目的在于提供一种多向姿态控制装置,其结构简单可靠,控制效率高。
本发明多向姿态控制装置,包括单向变距调姿机构与多向姿态控制支架。
其中,单向变距调姿机构由电机驱动螺旋桨模块旋转;同时采用舵机驱动及传动组件传动的方式同时控制螺旋桨模块中螺旋桨桨叶变距;多向姿态控制支架根据设计有多个安装面,实现多个单向变距调姿机构的固定。
上述螺旋桨桨叶变距控制具体设计方式为:
设计螺旋桨模块包括螺旋桨固定桨毂、螺旋桨活动桨毂与螺旋桨桨叶。其中,螺旋桨固定桨毂周向等角度间隔通过连接轴与螺旋桨固定桨毂连接。连接轴与螺旋桨固定桨毂间固定连接,连接轴与螺旋桨活动桨毂间通过轴承连接。同时各螺旋桨活动桨毂上设计有传动摇臂。
设计传动组件为传力臂、上滑块与驱动杆件。其中,上滑块套于驱动电机的输出轴上,末端为连接端,周向上通过与螺旋桨桨叶数量相同的传力臂分别连接各个传动摇臂。驱动杆件包括驱动摇臂、控制臂与拉杆;其中,驱动摇臂末端固定于舵机输出轴上,前端与控制臂末端铰接;控制臂前端与拉杆末端铰接,拉杆前端与上滑块间铰接。
由此,通过舵机带动驱动摇臂摆动,进而由控制臂带动拉杆摆动,拉动上滑块沿驱动电机的输出轴小幅移动,最终由四根传力臂带动四片螺旋桨桨叶转动,实现四片螺旋桨桨叶的同步等角度变距。
本发明的优点在于:
1.本发明多向姿态控制装置,采用轻质高强高可靠性结构实现了临近空间飞艇多方向同步调姿;
2.本发明多向姿态控制装置,可同时操控螺旋桨推力的方向和大小,具有响应速度快、控制效率高的特点;
3.本发明多向姿态控制装置,通过多个单向变距调姿机构的高效组合,实现了飞艇不同方向的控制解耦,对飞艇的飞行控制具有积极的作用。
附图说明
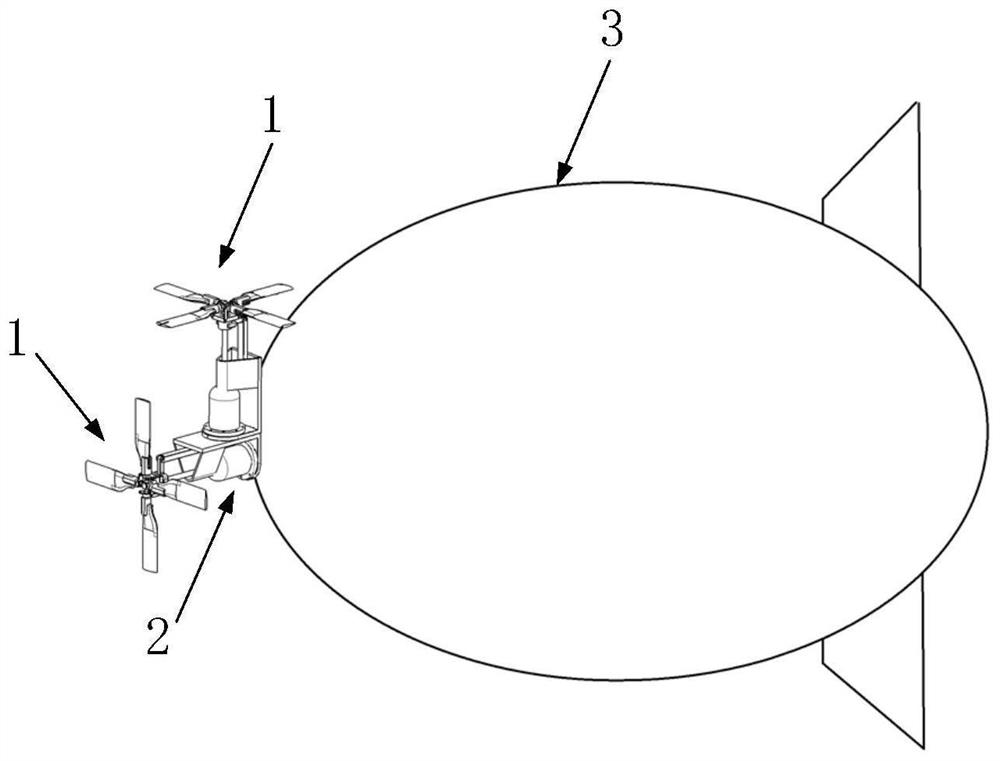
图1为本发明多向姿态控制装置安装位示意图;
图2为本发明多向姿态控制装置整体结构示意图;
图3为本发明多向姿态控制装置中螺旋桨模块结构示意图;
图4为本发明多向姿态控制装置中电机模块与变距模块结构示意图;
图5为本发明多向姿态控制装置中垂直设计的多向姿态控制支架结构示意图。
图中:
1-单向变距调姿机构 2-多向姿态控制支架 3-飞艇
101-螺旋桨模块 102-电机模块 103-变距模块
101a-螺旋桨固定桨毂 101b-螺旋桨活动桨毂 101c-连接轴
101d-螺旋桨桨叶 101e-传动摇臂 102a-驱动电机
102b-连接底座 103a-舵机 103b-传力臂
103c-上滑块 103d-驱动摇臂 103e-控制臂
103f-拉杆 201-飞艇连接面 202-电机固定面
具体实施方式
下面结合附图对本发明做进一步详细说明。
本发明多向姿态控制装置,用于临近空间飞艇的姿态调整,由多个单向变距调姿机构1与多向姿态控制支架2构成,均安装于临近空间飞艇3的头部,如图1所示。
所述单向变距调姿机构1包括由螺旋桨模块101、电机模块102、变距模块103组成,如图2所示。
螺旋桨模块101包括螺旋桨固定桨毂101a、螺旋桨活动桨毂101b、连接轴101c与螺旋桨桨叶101d,如图3所示。其中,螺旋桨固定桨毂101a为正方体结构,周向四个侧壁中心位置具有连接轴101c,连接轴101c一端与螺旋桨固定桨毂101a固定连接,四根连接轴101c呈十字构型,连接轴另一端通过轴承与螺旋桨活动桨毂101b活动连接。螺旋桨活动桨毂101b为U形结构,封闭端与连接轴101c另一端端部间通过轴承活动连接,螺旋桨活动桨毂101b用于连接螺旋桨桨叶101d,且各螺旋桨活动桨毂101b封闭端端部设计有垂直于螺旋桨活动桨毂101b轴向设置的传动摇臂101e,各传动摇臂101e端部设计有连接孔,用于与变距模块103相连。上述螺旋桨固定桨毂101a、螺旋桨活动桨毂101b均由7075铝合金制成。
螺旋桨桨叶101d为四片,由碳纤维复合材料制成,达到轻质高强的目的。四片螺旋桨桨叶101d根部分别插入前述螺旋桨活动桨毂101b内,螺旋桨桨叶101d根部具有安装孔,通过螺栓与螺旋桨活动桨毂101b间固定连接;且使螺旋桨桨叶101d前缘沿旋转方向设置。
所述电机模块102包括驱动电机102a与连接底座102b,如图4所示。其中,驱动电机102a的机体末端安装连接底座102b;连接底座102b采用法兰盘,用于实现单向变距调姿机构1与多向姿态控制支架2间连接。驱动电机102a的输出轴端部与螺旋桨模块101中螺旋桨固定桨毂101a固定,固定位置位于螺旋桨模块101中平行于四个连接轴101c轴线所在平面的一侧面中心位置。由此,驱动电机102a通过其输出轴将输出的扭矩传递至螺旋桨固定桨毂101a,为螺旋桨模块101提供动力,驱动螺旋桨桨叶101d产生多向姿态控制所需的推力。
所述变距模块103用于调整四片螺旋桨桨叶101d的桨距,包括舵机103a、传力臂103b、上滑块103c与驱动杆件。
其中,上滑块103c为套筒结构,套于驱动电机102a的输出轴上,末端为连接端,周向上设计有与螺旋桨桨叶101d数量相同的传力臂连接面,本实施方式中设计上滑块103c连接端为正方形结构,该连接端周向四个传力臂连接面端部设计有连接位,且四个侧面上的连接位与四个螺旋桨活动桨毂101b上的传动摇臂101e端部连接孔位置相对。
传力臂103b与螺旋桨桨叶101d数量需相同,为四根。四根传力臂103b一端分别与上滑块103c连接端周向四个侧面上的连接位间通过转轴轴接;四根传力臂103b另一端分别与对应位置的传动摇臂101e的连接孔通过转轴连接,使四根传力臂103b均平行于驱动电机102a。
驱动杆件用于控制螺旋桨桨叶101d变距,包括驱动摇臂103d、控制臂103e与拉杆103f。其中,驱动摇臂103d末端固定于舵机103a输出轴上,前端与控制臂103e末端铰接;控制臂103e前端与拉杆103f末端铰接,拉杆103f前端为U形结构连接插头,使上滑块103c套筒部分置于该连接插头内,两端相对位置与连接插头两端间铰接。由此,通过舵机103a带动驱动摇臂103d摆动,进而由控制臂103e带动拉杆103f摆动,拉动上滑块103c沿驱动电机的输出轴小幅移动,最终由四根传力臂103b带动4片螺旋桨桨叶101d转动,实现四片螺旋桨桨叶101d的同步等角度变距。上述传力臂103b、上滑块103c与控制臂103e均由7075铝合金制成。
所述多向姿态控制支架2用来安装上述结构的单向变距调姿机构1,采用7075铝合金或复合材料制成,可通过开设凹槽等方式减轻其重量。多向姿态控制支架2根据需求设计有多个安装面,实现多个单向变距调姿机构1的固定。本发明中多向姿态控制支架设计为分体结构,通过多个个体间的连接,形成整体多向姿态控制支架。如图5所示,每个个体具有飞艇连接面201与电机固定面202;其中,电机固定面202上设计有与电机模块102中连接底座102b匹配的螺孔,通过螺钉可实现连接底座102b与电机固定面202间的连接;飞艇连接面201用于固定单向变距调姿机构1中的舵机103a以及与飞艇间的连接。两个单体间通过其中一个单体的飞艇连接面201与另一个单体的电机固定面202间相连,使两个个体间的电机固定面202相互垂直,进而达到多个单体变距调姿机构2垂直布置的目的。上述结构的多向姿态控制装置,通过多向姿态控制支架1中通过在某一电机固定面202上安装飞艇转接支架,通过飞艇转接支架实现多向姿态控制装置与临近空间飞艇3头部间固定连接。由此通过调整每个单向变距调姿机构1的推力大小和方向,实现临近空间飞艇3偏航及俯仰姿态的同时控制。
本发明多向姿态控制装置中,螺旋桨桨叶101d的数量,根据设计推力要求设计,上滑块103c的形状需根据桨叶数量设计,保证上滑块103c与各个螺旋桨活动桨毂101b间连接的传力臂103b均平行于驱动电机102a的输出轴。同时,多向姿态控制支架2的设计不局限于具体实施方式中垂直角度的多向姿态控制支架2,可根据各个单向变距调姿机构1所需求的安装角度进行设计,使姿态控制支架2具有与所需求安装角度相同角度的固定面202。
- 一种多向姿态控制装置
- 一种负载姿态可多向调整的抗弯型离心机转臂