一种用于在轨组装的空间可展棱柱单元
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及空间可展机构,具体涉及一种用于在轨组装的空间可展棱柱单元。
背景技术
随着空间通信、对地观测、深空探测、载人航天等事业的迅猛发展,对大尺度、轻量化、高几何稳定性的宇航空间机构的需求变得非常迫切,但受火箭整流罩容积的限制,需要设计具有大折展比的空间结构组装单元,在运输和发射阶段处于折叠状态,而在航天器入轨后展开成工作状态。随着宇航空间研究计划的逐步发展和空间系统的复杂化程度升级,空间可展机构已从过去简单单一的形式向复杂、多自由度、模块化方向发展,大型空间折展机构成为近年来宇航科学与技术研究领域的热点。
大型可展开卫星天线的研究成为了卫星研制工作中的关键技术,对天线的口径要求越来越高,但对单环环形桁架机构,随着天线口径的增大,天线刚度下降,达不到实际的使用要求刚度。而如何提高天线整体刚度,还没有很好的解决方案。现有的环形桁架可展开天线大多采用电机拉动驱动绳索从而实现整个机构的展开,电机驱动虽然可以有效的控制展开速度,减少机构展开过程中的冲击振动,但复杂的驱动机构不但增加了结构的重量,也降低了结构的可靠性,容易引起环形桁架可展开天线展开失败,导致空间探测任务无法实现。
发明内容
本发明为克服现有技术不足,提供一种用于在轨组装的空间可展棱柱单元。该可展棱柱单元折展比大,承力性能好,可靠稳定,对称性好,有利于提高空间结构组装单元的在轨对接的连接刚度。
本发明的技术方案是:
一种用于在轨组装的空间可展棱柱单元包括同步机构、内横杆、外竖杆和中心竖杆;多个同步机构首尾相接组成上下两个环,同一个环中相邻的同步机构由相连的涡簧铰链折展限位,两个环通过与同步机构转动连接的外竖杆连接组成正六棱柱单元,正六棱柱单元的中心设置有中心竖杆,中心竖杆通过可折展的内横杆与同步机构转动连接形成正六棱柱折展单元,上环中相间的设置的三个同步机构各自分别与下环中斜对的两个同步机构通过拉索连接,上环中相间设置的三个同步机构通过拉索与中心竖杆的下端连接,和上环所述相间设置的三个同步机构斜对的下环中的同步机构与中心竖杆的上端连接。
本发明相比现有技术的有益效果是:
本发明利用涡簧铰链可以避免棱柱单元展开到位后的非人为因素的解锁,提高了大型结构体在轨组装的稳定性,外界的机械臂与中心竖杆和其上部的六杆接头连接,在展开过程中心竖杆保持不动,中心竖杆保证了单元的承力性能,展开过程为环形受到涡簧铰链的扭矩而运动。同步机构的作用可以减少组装单元自由度使杆件同步运动,还可实现外横杆展开的同步性。棱柱单元上下为对称结构,保证了外竖杆展开的稳定性。本发明的可展棱柱单元折展比大,承力性能好,可靠稳定,对称性好,有利于提高空间结构组装单元的在轨对接的连接刚度。
下面结合附图和实施方式对本发明的技术方案作进一步地说明:
附图说明
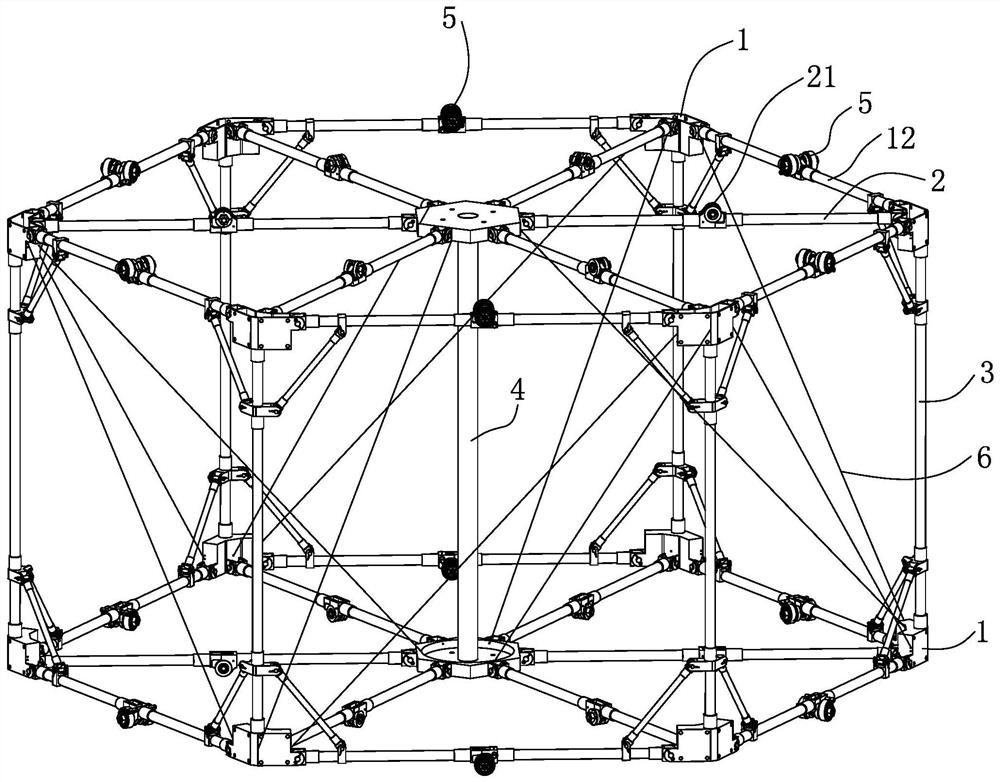
图1是本发明的在轨组装的空间可展棱柱单元展开状态图;
图2是本发明的在轨组装的空间可展棱柱单元折叠状态图;
图3是图1的俯视图;
图4是图3的主视图;
图5是图3的侧视图;
图6是上下两个同步机构分别与内横杆和外横杆连接的示意图;
图7是涡簧铰链的立体图;
图8是从一个方向看的转动副的立体图;
图9是从另一个方向看的转动副的立体图;
图10是带有卡接部的内杆接头的立体图;
图11是限位组件的装配图;
图12是涡簧铰链与两个外横杆连接的示意图;
图13是转动副与两个内横杆连接的示意图;
图14是中心竖杆的示意图。
具体实施方式
参见图1-图5所示,一种用于在轨组装的空间可展棱柱单元,包括同步机构1、内横杆2、外竖杆3和中心竖杆4;多个同步机构1首尾相接组成上下两个环,同一个环中相邻的同步机构1由相连的涡簧铰链5折展限位,两个环通过与同步机构1转动连接的外竖杆3连接组成正六棱柱单元,正六棱柱单元的中心设置有中心竖杆4,中心竖杆4通过可折展的内横杆2与同步机构1转动连接形成正六棱柱折展单元,上环中相间的设置的三个同步机构1各自分别与下环中斜对的两个同步机构1通过拉索6连接,上环中相间设置的三个同步机构1通过拉索6与中心竖杆4的下端连接,和上环所述相间设置的三个同步机构1斜对的下环中的同步机构1与中心竖杆4的上端连接。
外界的机械臂与中心竖杆4和其上部的六杆接头41连接(如图14所示),在展开过程中心竖杆4保持不动,中心竖杆4保证了单元的承力性能。展开过程为环形受到涡簧铰链5的扭矩而运动,整个单元包括24根外横杆、24根内横杆、7根竖杆、12个四杆接头和12根拉索。部分拉索6连接上下布置的六杆接头41。同步机构1的作用可以减少组装单元自由度使杆件同步运动,同步机构本质是曲柄滑块机构。
特别地是,如图6所示,所述同步机构1包括四杆接头11、外横杆12、连杆13和滑块14;每个四杆接头11分别与内横杆2和两个外横杆12铰接,与外竖杆3固接,滑块14滑动设置在外竖杆3上,滑块14与两个外横杆12之间布置有与二者铰接的连杆13。相邻两个同步机构1通过两个外横杆12连接,可展棱柱单元上下为对称结构,保证了外竖杆3展开的稳定性。同步机构1的设计能够保证相邻两根外竖杆3能够同时运动,设置上下同步机构结构相同,即可展棱柱单元上下运动完全一致,则在展开过程中折叠杆转角相同,且与其连接的连杆13的转角相同,可展棱柱单元可同步展开。同时铰接处为铰链连接,采用偏置的形式(四杆接头11的铰接点偏置),杆件可以折叠到平行的位置。
更进一步地是,如图7和图12所示,所述涡簧铰链5包括涡卷弹簧51、连接轴52和两个外杆接头53;连接轴52的两端分别套设有涡卷弹簧51,两个外杆接头53可转动地设置在连接轴52上,涡卷弹簧51一端被其中一个外杆接头53的延伸头顶压,涡卷弹簧51的另一端固定在连接轴52上,两个外杆接头53与外横杆12连接。因上述铰链是偏置的,在展开后会两根杆的距离逐渐变大然后会有略微的减小。单元展开到位后驱动铰链通过涡卷弹簧51锁定,若要解锁铰链必须使两根竖杆的距离为最大距离,需克服铰链阻力矩、拉索的作用力矩、涡卷弹簧的驱动力矩等,利用涡卷弹簧可以避免组装单元展开到位后的非人为因素的解锁,提高了大型结构体在轨组装的稳定性。单元展开时由涡卷弹簧51的驱动两个外横杆12的力矩驱动展开,当展开到位时由铰链的限位部件进行限位,此时由涡卷弹簧51的剩余驱动力矩及拉索的预紧力和铰链锁定。当机械臂夹取单元后,涡卷弹簧51驱动环展开,通过四杆接头两边的双曲柄滑块机构(两个连杆和滑块)实现外横杆展开的同步性。
如图8-图10和图13所示,两个内横杆2通过转动副21实现折展,所述转动副21包括传动轴211、限位组件212和两个内杆接头213;两个内杆接头213可转动地设置在传动轴211上,两个内杆接头213分别与内横杆2固接,限位组件212安装在一个内杆接头213上,另一个内杆接头213具有一卡接部2130,两个内横杆2完全展开后,卡接部2130被限位组件212限位,两个内横杆2折叠时,卡接部2130脱离限位组件212。两个内横杆2被完全展开后,在平面内呈一条直线。卡接部2130可为凸轮截去部分后的圆弧体,卡接部2130具有一个阻挡面,阻挡面与限位组件212配合实现限位和分离。
进一步来说,如图11所示,所述限位组件212包括长支杆2121、短支杆2122和两个连接板2123;长支杆2121和短支杆2122平行设置,长支杆2121和短支杆2122上固定有平行间隔设置的两个连接板2123,其中一个内杆接头213具有一个安装通槽2131,长支杆2121固定在安装通槽2131的侧壁上,两个内杆接头213相对转动时,所述卡接部2130能在安装通槽2131内运动,两个内横杆2完全展开后,卡接部2130被短支杆2122挡住,两个内横杆2折叠时,卡接部2130脱离短支杆2122。两个内横杆2折展时,卡接部2130能在安装通槽2131内运动,当两个内横杆2完全展开后呈一条直线,此时,卡接部2130卡在短支杆2122上实现限位,当两个内杆接头反向转动实现折叠时,卡接部2130脱离短支杆2122,在安装通槽2131内转动,直至两个内横杆2折叠到位。
发射时本实施方式的可展棱柱单元均为收拢状态,收拢于收纳桶内。到达预定轨道后外界的机械臂通过可展单元上的夹持接口拿取可展单元,该可展单元在受到涡卷弹簧51的扭矩下在轨展开。单元展开后外界的机械臂夹持单元进行大型结构体的在轨组装。
外部的对接装置与可展开单元用螺栓进行连接,对接装置在可展单元上沿着圆周均布设置,在一个四杆接头11上布置对接装置。由于单元为对称结构且保证在轨组装后大型结构体的刚度,将对接装置对称布置。外界的机械臂或者航天员在装配时首先将中心的可展单元装在卫星载体的基准平台上。在进行大型结构体一圈的装配,整个大型结构在装配时在采取围绕中心的可展单元进行一圈一圈的装配。
本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
- 一种用于在轨组装的空间可展棱柱单元
- 四棱柱可展单元以及基于四棱柱可展单元的空间伸展机构