一种用于PIV测量的无人机双粒子抛投装置
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及无人机抛投装置,尤其是一种搭载在无人机上在进行PIV测量时用来进行微型示踪体及大示踪体抛投的装置,属于水利测量领域。
背景技术
在野外采用无人机进行PIV流速测量已经逐步在水利测量领域开展。但是野外河流或者湖泊中抛洒示踪体一直比较困难。因为距离远、面积大,在自然水体中一直没有合适的方法进行远程抛投。虽然在现有技术中经常采用水体表面自然示踪进行PIV采样计算,但是对于湖泊或者河流局部位置,由于光线原因无法采集水面波。这时采用示踪体对水面流场进行展现就显得尤为重要。
尤其是在对水面波动特征进行标定时,示踪体具有不可替代的优势。
随着无人机技术的快速发展,无人机由最初的军用扩展到现在的警用、民用的广泛应用,如消防、救援、测绘、投放快递等。目前,无人机抛投装置在水利勘测中起到了重要的作用。
但是现有的无人机抛投装置经常存在3个缺陷:
1,一次只能携带一个被投物进行投放;
2,投放过程中经常会产生卡阻;
3,无法对多种尺寸的示踪体进行分开投放。
发明内容
本发明的目的在于,提供一种用于PIV测量的无人机双粒子抛投装置,为PIV野外测量提供粒子抛撒支持。
一种用于PIV测量的无人机双粒子抛投装置,包括两个动力系统:一个是垂向动作的抛投微型示踪体装置;另一个是水平转动的抛投大示踪体装置。
上述的垂向动作的抛投微型示踪体装置:包括:活塞、活塞舵机、活塞顶杆、活塞盖、内壳、连接立杆;
上述的活塞顶杆底端与活塞固定连接,上部穿过内壳和连接立杆,通过销连与活塞舵机的拨杆相连,活塞舵机的拨杆往复运动带动活塞顶杆在连接立杆内往复运动,进而带动活塞盖往复运动,开关内壳的底部;
内壳内装有微型示踪体,在活塞盖处于张开位置时,粒子在活塞盖上滑落;
在活塞盖处于关闭位置时,粒子在内壳内保存。
上述的水平转动的抛投大示踪体装置,包括:内壳、外壳、大示踪体悬挂器、棘轮,主动棘爪,棘爪舵机,锁紧块,固定横梁;
上述的内壳顶部固定连接立杆,连接立杆穿过外壳和棘轮中心,通过锁紧块锁紧并通过螺丝固定在固定横梁上,固定横梁固定在无人机上;
上述内壳和外壳之间是大示踪体存储空间;
上述的内壳外侧设置开口环形台;
上述的大示踪体悬挂器通过固定角件固定安装在外壳内侧,条形挂钩通过转轴安装在固定角件上,条形挂钩另一端搭在内壳外侧的开口环形台上,大示踪体挂在条形挂钩上。
上述的棘轮固定在外壳的顶部,棘爪舵机推动主动棘爪往复运动,主动棘爪每次推动棘轮旋转一个齿位,被动棘爪在弹簧作用下卡住棘轮,使得棘轮在每个齿位处于持住状态;棘轮为8齿棘轮,每次带动外壳转动1/8周长;使得每次转动停止时有一个大示踪体悬挂器处于环形台的缺口处;由于缺少了环形台的支撑,大示踪体悬挂器的条形挂钩向下倾斜,大示踪体从条形挂钩上滑下去,弹簧将条形挂钩推向上复位。
另外本发明还公开一种使用无人机双粒子抛投装置进行PIV测量的方法,包括如下步骤:
1)PIV测量无人机首先对测量区域进行初步拍摄测算获得初步测算照片;
2)分析初步测算照片,确定需要进行PIV粒子抛撒的区域,区分微型示踪体和大示踪体的不同抛撒区域;
3)测量无人机和双粒子抛投无人机同时起飞,在双粒子抛撒期间进行PIV测量拍摄;
4)对测量拍摄结果进行计算,若仍有区域不能满足测算条件,重复步骤2),3)。
具体而言,本发明的有益效果如下:
1,能够进行微型示踪体及大示踪体两种标志物的远程投放;
2,投放口不会被微型示踪体堵塞;
3,大示踪体投放挂钩不会卡住,动作简单,保证快速完成投放。
附图说明
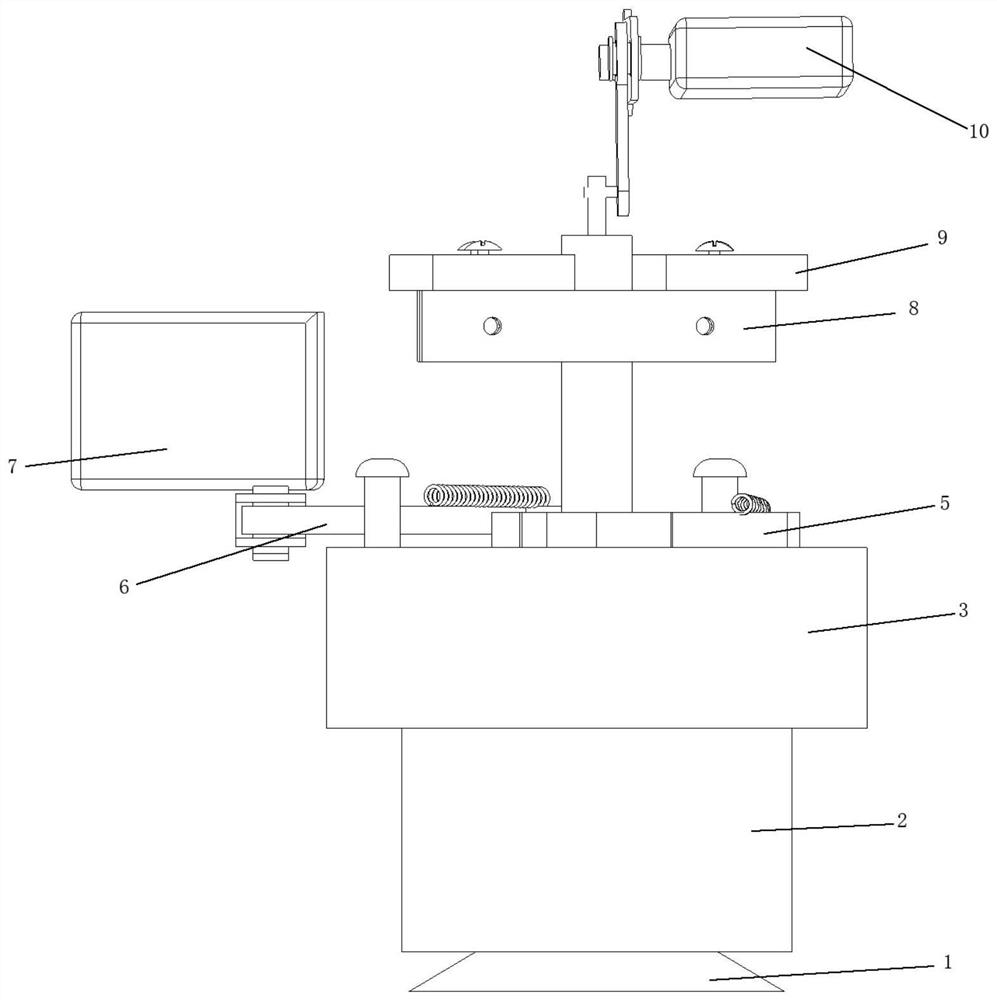
图1本发明整体正视示意图;
图2本发明的俯视示意图;
图3本发明移除固定横梁的俯视示意图;
图4本发明仰视示意图;
图5本发明活塞示意图;
图6本发明内壳示意图;
图7本发明大示踪体悬挂器示意图。
具体实施方式
下面结合附图对本发明作进一步描述,以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
实施例一
一种用于PIV测量的无人机双粒子抛投装置,包括两个动力系统:一个是垂向动作的抛投微型示踪体装置;另一个是水平转动的抛投大示踪体装置。
上述的垂向动作的抛投微型示踪体装置:包括:活塞1、活塞舵机10、活塞顶杆11、活塞盖12、内壳2、连接立杆21;
上述的活塞顶杆11底端与活塞盖12固定连接,上部穿过内壳2和连接立杆21,通过销连与活塞舵机10的拨杆相连,活塞舵机10的拨杆往复运动带动活塞顶杆11在连接立杆21内往复运动,进而带动活塞盖12往复运动,开关内壳2的底部;
内壳2内装有微型示踪体,在活塞盖12处于张开位置时,微型示踪体在活塞盖12上滑落;在活塞盖处于关闭位置时,粒子在内壳内保存。
上述的水平转动的抛投大示踪体装置,包括:内壳2、外壳3、大示踪体悬挂器4、棘轮5,主动棘爪6,棘爪舵机7,锁紧块8,固定横梁9;
上述的内壳2顶部固定连接立杆21,连接立杆21穿过外壳3和棘轮5中心,通过锁紧块8锁紧并通过螺丝固定在固定横梁9上,固定横梁9固定在无人机上;
上述内壳2和外壳3之间是大示踪体存储空间;
上述的内壳2外侧设置开口环形台23;
上述的大示踪体悬挂器4通过固定角件41固定安装在外壳3内侧,条形挂钩43通过转轴安装在固定角件41上,条形挂钩43另一端搭在内壳2外侧的开口环形台23上,大示踪体挂在条形挂钩43上。
上述的棘轮5固定在外壳3的顶部,棘爪舵机7推动主动棘爪6往复运动,主动棘爪6每次推动棘轮5旋转一个齿位,被动棘爪在弹簧作用下卡住棘轮5,使得棘轮5在每个齿位处于持住状态;
棘轮5为8齿棘轮,每次带动外壳转动1/8周长;使得每次转动停止时有一个大示踪体悬挂器4处于环形台23的缺口处;由于缺少了环形台23的支撑,大示踪体悬挂器4的条形挂钩43向下倾斜,大示踪体从条形挂钩43上滑下去,弹簧将条形挂钩43推向上复位。
上述的连接立杆21外径为2cm,高度为15cm;
上述的内壳仓22外径为15cm,壁厚为2mm,高度为8cm;
上述的环形横臂23宽度为1cm,上有长度为周长的1/8的缺口;
上述的外壳3外径为18cm,壁厚为2mm,高度为6cm;
上述的条形挂钩8长度为2.8cm,厚度为0.5cm。
上述的大示踪体悬挂器4沿外壳3内壁可以安装8或16个。
另外本发明还公开一种使用无人机双粒子抛投装置进行PIV测量的方法,包括如下步骤:
1)PIV测量无人机首先对测量区域进行初步拍摄测算获得初步测算照片;
2)分析初步测算照片,确定需要进行PIV粒子抛撒的区域,区分微型示踪体和大示踪体的不同抛撒区域;
3)测量无人机和双粒子抛投无人机同时起飞,在双粒子抛撒期间进行PIV测量拍摄;
4)对测量拍摄结果进行计算,若仍有区域不能满足测算条件,重复步骤2),3)。
- 一种用于PIV测量的无人机双粒子抛投装置
- 一种用于PIV测量的无人机大示踪体抛投装置