一种基于预置姿态的卫星入轨快速成像方法
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及一种基于预置姿态的卫星入轨快速成像方法,属于航天领域。
背景技术
传统卫星入轨后的姿态控制过程一般需先后经历对日捕获控制、对日定向到最终建立巡航姿态进行在轨测试等阶段。卫星建立姿态基准后,再开展成像。从卫星入轨到第一次成像的时间一般为1天~7天,即便是以快速响应能力著称的美国TacSat系列卫星,从发射入轨到第一次成像消耗时间也长达约12小时。
这使得现有的卫星入轨成像技术存在控制流程繁琐、成像准备时间长和卫星相应速度慢等问题。
发明内容
本发明的目的是提出一种基于预置姿态的卫星入轨快速成像方法,以解决现有技术张量磁定位方法存在定位盲区,针对定位盲区的误差补偿又不充分,定位精度不够的问题。
一种基于预置姿态的卫星入轨快速成像方法,所述卫星入轨快速成像方法包括以下步骤:
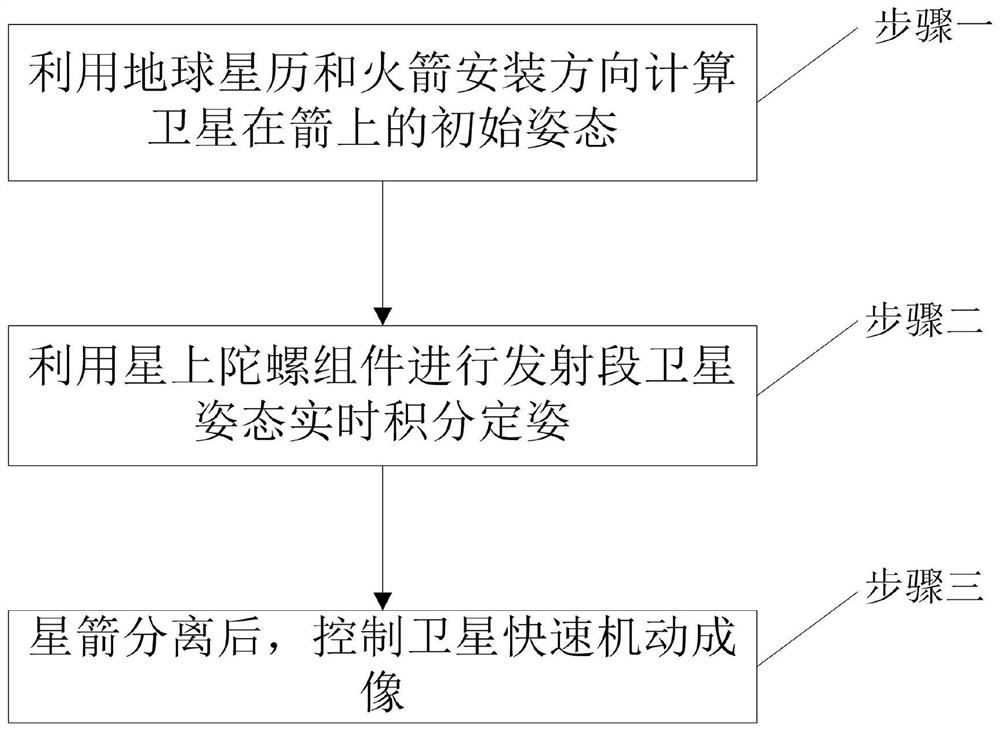
步骤一、利用地球星历和火箭安装方向计算卫星在箭上的初始姿态;
步骤二、利用星上陀螺组件进行发射段卫星姿态实时积分定姿;
步骤三、星箭分离后,控制卫星快速机动成像。
进一步的,定义箭上首次计算时刻为t
在步骤一中,具体包括以下步骤:
步骤一一、通过地球星历信息,计算t
步骤一二、通过发射点经、纬度信息,计算发射点北东地坐标系相对于地球本体固连坐标系的姿态矩阵,记为矩阵R
步骤一三、通过火箭射前安装方向信息,计算火箭本体坐标系相对于发射点北东地坐标系的旋转矩阵,记为矩阵R
步骤一四、通过卫星与火箭的相对安装关系,计算得到卫星相对于火箭的姿态矩阵,记为矩阵R
步骤一五、计算初始t
R
计算结果R
进一步的,在步骤二中,具体的,t
其中,
ω
进一步的,在步骤三中,具体的,t
本发明的主要优点是:本发明创造的优点在于以下几个方面:
(1)传统卫星的姿态计算和控制流程从星箭分离后开始,而本文提出的方法利用地球星历、火箭的安装方向等信息,计算箭上卫星的初始姿态,将姿态计算和控制流程的开始时间提前至卫星箭上加电阶段,充分利用了地面已知信息,简化了入轨后的控制流程。
(2)本文提出的方法大幅缩短了成像准备时间,提高了卫星的成像响应速度,将卫星的成像时间由传统的数小时降低至分钟级。
(3)在仅采用常用配置的条件下,通过软件预置参数的方式提高了卫星成像响应速度,卫星研制硬件成本相比于传统卫星并无提高。
附图说明
图1是本发明的一种基于预置姿态的卫星入轨快速成像方法的方法流程图;
图2是各时刻与阶段关系图;
图3是步骤三的方法流程图。
具体实施方式
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种基于预置姿态的卫星入轨快速成像方法,所述卫星入轨快速成像方法包括以下步骤:
步骤一、利用地球星历和火箭安装方向计算卫星在箭上的初始姿态;
步骤二、利用星上陀螺组件进行发射段卫星姿态实时积分定姿;
步骤三、星箭分离后,控制卫星快速机动成像。
进一步的,参照图2所示,定义箭上首次计算时刻为t
在步骤一中,具体包括以下步骤:
步骤一一、通过地球星历信息,计算t
步骤一二、通过发射点经、纬度信息,计算发射点北东地坐标系相对于地球本体固连坐标系的姿态矩阵,记为矩阵R
步骤一三、通过火箭射前安装方向信息,计算火箭本体坐标系相对于发射点北东地坐标系的旋转矩阵,记为矩阵R
步骤一四、通过卫星与火箭的相对安装关系,计算得到卫星相对于火箭的姿态矩阵,记为矩阵R
步骤一五、计算初始t
R
即为t
进一步的,在步骤二中,具体的,t
其中,
ω
根据此方法,递推至t
进一步的,在步骤三中,具体的,t
- 一种基于预置姿态的卫星入轨快速成像方法
- 基于点目标的敏捷成像卫星直线扫描条带预生成方法和卫星三轴姿态快速确定方法