一种多轮多支柱式飞机的地面转弯控制方法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及多轮多支柱式飞机地面转弯控制领域,尤其是涉及一种多轮多支柱式飞机的地面转弯控制方法。
背景技术
随着现代航空技术的发展,航空运输需求不断增长,民用飞机也在向着运载能力大的宽体飞机方向发展。宽体飞机起飞着陆重量较大,对于起落架系统布局以及跑道承载性提出了更高的要求,而多轮多支柱式起落架系统可以有效减小起落架上单个轮胎所承受的载荷、改善地面载荷传递至机体的形式、降低飞机对跑道的相关需求,因此广泛应用于宽体飞机起落架布局设计中。
对于窄体飞机普遍应用的前三点式起落架系统,前起落架和主起落架均是两轮形式。地面转弯过程中前起落架轮胎转向,主轮不转向,因此飞机的地面转弯中心始终位于两侧主轮轴向连线的延长线上。
对于采用前、主轮协同转弯的多轮多支柱式宽体飞机,前起落架为两轮形式,主起落架为多轮小车式。地面转弯过程中,当前起落架轮胎转过一定角度时,操纵主起落架向相反方向小角度转动,辅助减小飞机转弯半径,而前、主轮协同转角关系的计算以及转弯控制系统的设计都与飞机地面转弯中心线的位置密切相关。由于小车式起落架轮胎数目较多,且飞机前、主轮均可以转向,因此飞机地面转弯中心线位置难以确定。多轮多支柱式飞机地面转弯过程中,前、主轮协同转弯在保证飞机地面机动特性的前提下,不可避免地对轮胎带来较大的附加侧向载荷,产生的附加侧向扭矩与发动机推力产生的转弯推力扭矩方向相反,会阻碍飞机转弯过程。
发明内容
本发明的目的就是为了克服上述现有技术存在多轮多支柱式飞机上小车式起落架轮胎数目较多,且飞机前、主轮均可以转向,导致飞机地面转弯中心线位置难以确定的缺陷而提供一种多轮多支柱式飞机的地面转弯控制方法。
本发明的目的可以通过以下技术方案来实现:
一种多轮多支柱式飞机的地面转弯控制方法,包括以下步骤:
在多轮多支柱式飞机地面转弯过程中,实时获取多轮多支柱式飞机的位置坐标和轮胎使用工况;
确定所述多轮多支柱式飞机的理论转弯中心坐标和实际转弯中心坐标,并根据所述多轮多支柱式飞机的位置坐标,计算在某一前起落架轮胎转角下,各个轮胎的侧偏角;
根据所述轮胎使用工况,结合预设的轮胎参数,计算各个轮胎的侧偏刚度;
根据所述侧偏角和侧偏刚度计算各个轮胎的附加侧向载荷;
根据所述侧偏角、附加侧向载荷和多轮多支柱式飞机的位置坐标,计算所有轮胎的总附加侧向扭矩;
计算不同前起落架轮胎转角下,所有轮胎的总附加侧向扭矩,获取总附加侧向扭矩最小时对应的飞机瞬时转动中心,用最小方差法进行数据拟合,确定飞机地面转弯中心线;
根据所述飞机地面转弯中心线位置,进行多轮多支柱式飞机的地面转弯控制。
进一步地,所述侧偏角的计算表达式为:
式中,理论转弯中心坐标(x
进一步地,所述总附加侧向扭矩的计算表达式为:
T
T=T
式中,T为总附加侧向扭矩,F
进一步地,所述轮胎使用工况包括轮胎垂直载荷,所述轮胎参数包括轮胎宽度、轮胎压力、轮胎额定压力和轮胎直径,根据所述轮胎垂直载荷、轮胎宽度、轮胎压力、轮胎额定压力和轮胎直径计算各个轮胎的侧偏刚度。
进一步地,所述侧偏刚度的计算表达式为:
式中,
进一步地,将多轮多支柱式飞机中前起落架的两个轮胎视为单个轮胎,所述前起落架轮胎的轮胎垂直载荷的计算表达式为:
N′=V′
式中,N′为前起落架轮胎的轮胎垂直载荷,V′为前起落架垂直载荷。
进一步地,多轮多支柱式飞机中机翼起落架前后轴垂直载荷分配计算表达式为:
式中,N
进一步地,多轮多支柱式飞机中机身起落架前、中、后轴垂直载荷分配计算表达式为:
式中,N
进一步地,所述附加侧向载荷的计算表达式为:
F=(φ′-0.0668φ′
F=1.0063·N·μ φ′≥1.54°
式中,F为轮胎附加侧向载荷,μ为附着系数,N为轮胎垂直载荷,φ′为无量纲侧偏角,
进一步地,获取不同前起落架轮胎转角下,总附加侧向扭矩最小时对应的瞬时转动中心,通过最小方差法拟合得到飞机地面转弯中心线位置。
与现有技术相比,本发明具有以下优点:
(1)本发明通过确定飞机的理论转弯中心和实际转弯中心,计算在不同的前起落架轮胎转角下各个轮胎的侧偏角,并结合轮胎的侧偏刚度,计算出所有轮胎的总附加侧向扭矩,选取全体起落架所有轮胎的总附加侧向扭矩最小时对应的瞬时转动中心,用最小方差法进行数据拟合,确定飞机地面转弯中心线;从而进行飞机地面转弯控制,该方法可快速简便计算获取多轮多支柱式飞机地面转弯中心线的位置,使得多轮多支柱式飞机地面转弯过程更加顺畅,也为多轮多支柱式飞机地面转弯控制系统设计提供理论依据。
(2)本发明根据前起落架、两侧机翼起落架、两侧机身起落架各轴的中间位置坐标,计算各轮胎的侧偏角;将起落架上的同轴轮胎视为整体,用单个轮胎代替,该方案在保证计算结果准确度的基础上,减化了计算流程,提高了计算效率。
(3)本发明采用最小方差法对不同前起落架轮胎转角下飞机地面转弯中心点进行数据拟合,从而获取飞机地面转弯中心线位置,该方案既减少了采样点的数量,又保证了获取的前起落架轮胎转角的可靠性。
附图说明
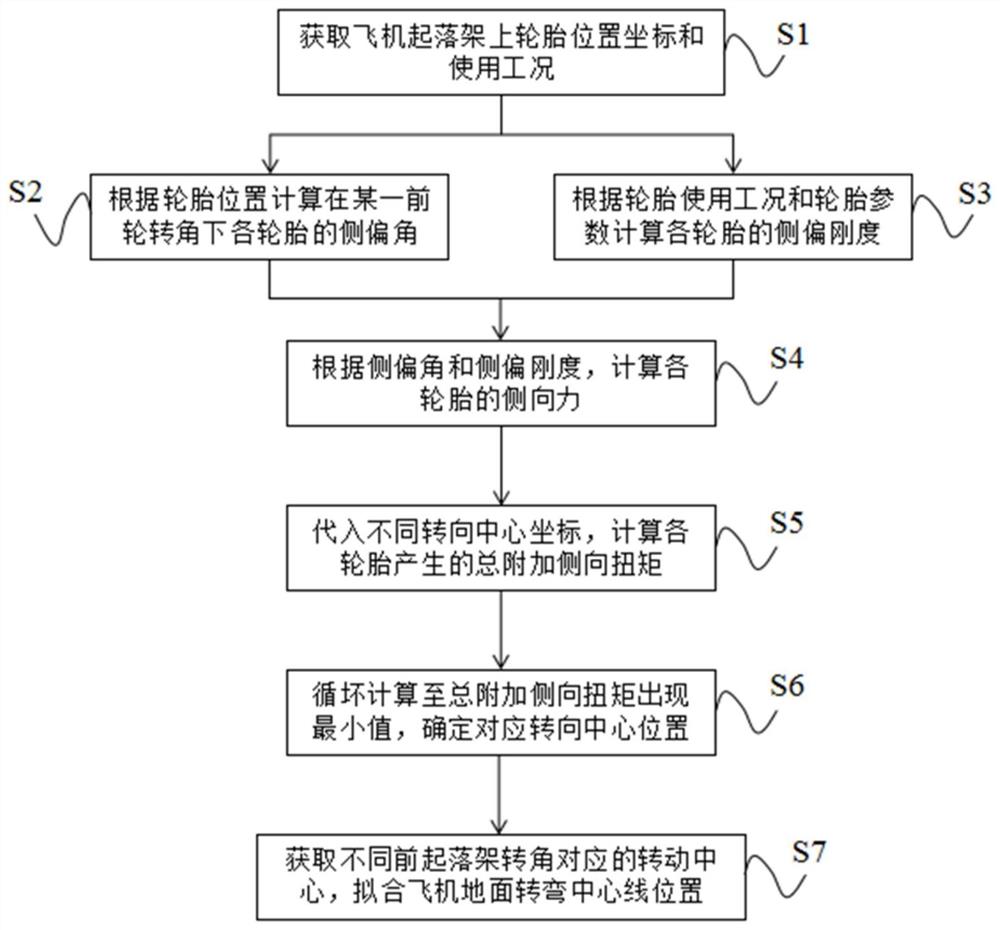
图1为本发明实施例中多轮多支柱式飞机的地面转弯控制方法的流程示意图;
图2为本发明为实施例飞机起落架轮胎布局示意图;
图3为本发明为实施例示出的一种多轮多支柱式飞机转弯平面示意图;
图中,1、前起落架轮胎,2、内侧机翼起落架前轴轮胎,3、外侧机翼起落架前轴轮胎,4、内侧机翼起落架后轴轮胎,5、外侧机翼起落架后轴轮胎,6、内侧机身起落架前轴轮胎,7、外侧机身起落架前轴轮胎,8、内侧机身起落架中轴轮胎,9、外侧机身起落架中轴轮胎,10、内侧机身起落架后轴轮胎,11、外侧机身起落架后轴轮胎,φ
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例1
如图1所示,本实施例提供一种多轮多支柱式飞机的地面转弯控制方法,包括以下步骤:
S1:根据飞机起落架布局及其几何关系,以前起落架轮轴的中心位置为原点建立平面坐标系;在多轮多支柱式飞机地面转弯过程中,实时获取多轮多支柱式飞机的位置坐标和轮胎使用工况;
S2:确定多轮多支柱式飞机的理论转弯中心坐标和实际转弯中心坐标,并根据多轮多支柱式飞机的位置坐标,计算在某一前起落架轮胎转角下,各个轮胎的侧偏角;
S3:根据轮胎使用工况,结合预设的轮胎参数,计算各个轮胎的侧偏刚度;
S4:根据侧偏角和侧偏刚度计算各个轮胎的附加侧向载荷;
S5:根据侧偏角、附加侧向载荷和多轮多支柱式飞机的位置坐标,计算所有轮胎的总附加侧向扭矩;
S6:计算不同前起落架轮胎转角下,所有轮胎的总附加侧向扭矩,获取总附加侧向扭矩最小时对应的前起落架轮胎转角,确定飞机地面转弯中心线位置;
S7:根据飞机地面转弯中心线位置,进行多轮多支柱式飞机的地面转弯控制。
作为一种优选的实施方式,侧偏角的计算表达式为:
式中,理论转弯中心坐标(x
作为一种优选的实施方式,总附加侧向扭矩的计算表达式为:
T
T=T
式中,T为总附加侧向扭矩,F
作为一种优选的实施方式,轮胎使用工况包括轮胎垂直载荷,轮胎参数包括轮胎宽度、轮胎压力、轮胎额定压力和轮胎直径,根据轮胎垂直载荷、轮胎宽度、轮胎压力、轮胎额定压力和轮胎直径计算各个轮胎的侧偏刚度。
作为一种优选的实施方式,侧偏刚度的计算表达式为:
式中,
作为一种优选的实施方式,将多轮多支柱式飞机中前起落架的两个轮胎视为单个轮胎,前起落架轮胎的轮胎垂直载荷的计算表达式为:
N′=V′
式中,N′为前起落架轮胎的轮胎垂直载荷,V′为前起落架垂直载荷。
作为一种优选的实施方式,多轮多支柱式飞机中机翼起落架前后轴垂直载荷分配计算表达式为:
式中,N
作为一种优选的实施方式,多轮多支柱式飞机中机身起落架前、中、后轴垂直载荷分配计算表达式为:
式中,N
作为一种优选的实施方式,利用考虑变形影响的轮胎模型计算附加侧向载荷的计算表达式为:
F=(φ′-0.0668φ′
F=1.0063·N·μ φ′≥1.54°
式中,F为轮胎附加侧向载荷,μ为附着系数,N为轮胎垂直载荷,φ′为无量纲侧偏角,C
作为一种优选的实施方式,通过最小方差法,对不同前起落架轮胎转角下全体起落架所有轮胎的总附加侧向扭矩最小时对应的瞬时转动中心进行数据拟合,确定飞机地面转弯中心线,可利用计算机编程实现该方案中的数据拟合过程。
将上述优选的实施方式进行组合可以得到一种最优的实施方式,下面对该最优的实施方式对应的一种具体实施举例进行介绍。
由于飞机在地面转弯过程中受力非常复杂,道面平整度、驾驶员操纵方式和飞机速度等因素都会对其受力产生影响,为简化分析,作如下假设:
(1)忽略机身和重心的倾斜;
(2)忽略道面不平整度影响;
(3)忽略空气阻力、飞机气动升力以及其他各种气动耦合项的影响;
(4)将起落架上的同轴轮胎视为整体,用单个轮胎代替。
本发明实施例提供的多轮多支柱式飞机的地面转弯控制方法,其具体实现过程包括以下步骤:
步骤一:根据飞机起落架布局及其几何关系,以前起落架轮轴的中心位置为原点建立平面坐标系,计算飞机地面转弯过程中起落架上各个轮胎的侧偏角。
步骤二:根据轮胎参数和使用工况计算各个轮胎的侧偏刚度。
步骤三:根据轮胎模型,计算不同前起落架轮胎转角下起落架上各个轮胎的附加侧向载荷。
步骤四:计算全体起落架上所有轮胎产生的总附加侧向扭矩。
步骤五:利用计算机软件编程计算不同前起落架轮胎转角下全体起落架所有轮胎的总附加侧向扭矩最小时对应的瞬时转动中心,用最小方差法进行数据拟合,确定飞机地面转弯中心线;
步骤六:根据步骤五获取的飞机地面转弯中心线进行飞机地面转弯控制。
飞机起落架轮胎布局如图2所示,具体计算过程中的数据如表1-4所示。
表1前起落架轮胎转角及对应侧偏角
表2起落架布局尺寸
表3各个轮胎位置坐标
表4起落架轮胎参数
表5起落架垂直载荷分配
算例中飞机起落架轮胎布局如图2所示,内外侧转向主轮转角与前轮转角关系如下:
如图3所示,计算得出本算例飞机地面转弯中心线位置为x
本发明根据多轮多支柱式飞机起落架布局及其几何关系,计算飞机地面转弯过程中起落架上各个轮胎侧偏角;根据轮胎参数和使用工况计算各个轮胎侧偏刚度;根据轮胎模型,计算前起落架轮胎不同转角下各个轮胎的附加侧向载荷;计算由全体起落架所有轮胎产生的总附加侧向扭矩;利用计算机软件编程计算前起落架轮胎不同转角下全体起落架所有轮胎产生的总附加侧向扭矩最小时对应的瞬时转动中心位置,用最小方差法进行数据拟合,确定飞机地面转弯中心线位置;该方案可快速简便计算获取多轮多支柱式飞机地面转弯中心线的位置,为多轮多支柱式飞机地面转弯控制系统设计提供理论依据。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 一种多轮多支柱式飞机的地面转弯控制方法
- 一种多轮多支柱式飞机的地面转弯控制方法