一种基于互联网的高速公路巡查无人机
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及无人机技术领域,具体涉及一种基于互联网的高速公路巡查无人机。
背景技术
高速公路的投入使用提高了人们出行的速度,因此高速公路的重要性不言而喻,高速公路巡查是对路面、交通、路基、桥梁、隧道和沿线设施的外观状况进行巡视检查,现有的高速公路巡查是通过人工去巡查,人工巡查成本高、机动性差且不安全,随着无人机的发展,无人机慢慢替代了高速公路巡查员的工作,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机实际上是无人驾驶飞行器的统称,现有的巡查无人机续航时间为1-2小时,远远达不到完成对高速公路巡查,因此需要对无人机的电池进行更换,在高速公路上更换不利于工作人员的安全,因此工作人员会将无人机降落在高速公路的外侧,由于外侧的路面坑坑洼洼,使得无人机在落下后由于重心不稳会造成侧翻的情况,从而造成无人机的损坏,进而影响无人机的正常使用。
现有技术中也出现了一些关于基于互联网的高速公路巡查无人机的技术方案,如申请号为CN201810339325.0的一项中国专利公开了一种高速公路路况勘探用无人机,包括无人机本体、摄像头、螺旋桨、蓄电箱、支腿、照明结构、限位板、防尘箱、盖板、第一驱动结构、第二驱动结构、限位箱、喇叭和节能灯;无人机本体的底端设有用于勘探的摄像头;无人机本体的一端设有用于照明警示的照明结构,用于照明的节能灯与用于预警的喇叭设于用于调节角度的第一驱动结构与第二驱动结构一端的限位箱;无人机本体的底端设有用于泄压支撑的支腿;该技术方案的无人机本体的底端四角处设有支腿,减小支腿的占用空间,摄像头配合照明结构的使用便于在夜间勘探路况,便于对高速公路路况较差地带及时处理,同时对路况较差的地带具有预警的作用;但是该技术方案在不平整的路面落下后,由于重心不稳,从而造成无人机侧翻的情况,造成无人机损坏,进而造成该技术方案的局限性。
鉴于此,为了克服上述技术问题,本发明提出了一种基于互联网的高速公路巡查无人机,采用了特殊的无人机结构,解决了上述技术问题。
发明内容
为了弥补现有技术的不足,本发明提出了一种基于互联网的高速公路巡查无人机,通过压力传感器感应平衡棒对其挤压的压力与电动推杆带动支脚运动相配合,从而保证了无人机在落地后保持重力平衡状态,使得无人机在落在不平整的路面上时,不会造成无人机侧翻的情况,进而保护了无人机元件不受损坏,提高了高速公路巡查无人机的实用性,同时本发明还减少了支脚带来的空气阻力,节约了无人机运行所耗的电能。
本发明解决其技术问题所采用的技术方案是:本发明所述的一种基于互联网的高速公路巡查无人机,包括本体、螺旋桨、支脚和控制器;所述本体的两端均安装有摄像头,本体的两侧安装有动力臂;所述动力臂对称分布在本体的两侧,动力臂一端的上部转动连接着螺旋桨,动力臂一端的下部固连有支板;所述本体的两侧还设置有一号圆槽;所述一号圆槽内固连有配重棒,配重棒上套有砝码;所述高速公路巡查无人机的重心位于本体的中心处;所述本体中心处的下端设置有台阶孔;所述台阶孔的孔底球接着平衡棒;当本体的上下两端面与水平面平行时,平衡棒的端部不与台阶孔的内壁接触;所述台阶孔的内壁安装有压力传感器;所述压力传感器均匀分布在台阶孔的内壁上;所述本体下端的四个拐角固连有电动推杆;所述电动推杆的端部固连有支脚;所述支脚下端的中心处设置有二号圆槽;所述二号圆槽内安装有距离传感器;所述控制器用于控制高速公路巡查无人机自动运行;
工作时,现有的巡查无人机续航时间为1-2小时,远远达不到完成对高速公路巡查,因此需要对无人机的电池进行更换,在高速公路上更换不利于工作人员的安全,因此工作人员会将无人机降落在高速公路的外侧,由于外侧的路面坑坑洼洼,使得无人机在落下后由于重心不稳会造成侧翻的情况,从而造成无人机的损坏,进而影响无人机的正常使用;因此本发明中需要对无人机进行电池更换时,工作人员通过手柄控制无人机降落在高速公路外侧,无人机靠近地面时,距离感应器感应到支脚距离地面小于30厘米时,控制器控制电动推杆伸长,电动推杆带动支脚移动,使得螺旋桨停止转动后,支脚起到对无人机的支撑作用,当本体的两端面与路面倾斜后,平衡棒的端部与台阶孔的内壁接触,压力传感器受到挤压后产生压力数值,从而将结果反馈至控制器,控制器再控制远离有压力数值的压力传感器的电动推杆缩短,使得平衡棒的端部不与台阶孔的内壁接触,保证了本体的两端面与水平面平行,防止本体在重心不稳的情况下而侧翻,造成零件损坏的情况,通过支板进一步起到对螺旋桨防护作用,防止无人机支脚失效,造成无人机损坏的情况,当无人机远离地面过程中,距离感应器感应支脚距离地面大于30厘米后,控制器控制电动推杆缩短,从而通过电动推杆将支脚收起,减少了支脚带来的空气阻力,节约了无人机运行所耗的电能;通过增减砝码来调节无人机的重力中心与位于本体的中心处;本发明通过压力传感器感应平衡棒对其挤压的压力与电动推杆带动支脚运动相配合,从而保证了无人机在落地后保持重力平衡状态,使得无人机在落在不平整的路面上时,不会造成无人机侧翻的情况,进而保护了无人机元件不受损坏,提高了高速公路巡查无人机的实用性,同时本发明还减少了支脚带来的空气阻力,节约了无人机运行所耗的电能。
优选的,所述支脚的下端设置有一号凹槽;所述一号凹槽均匀分布在支脚的下端,一号凹槽内滑动连接着滑棒,一号凹槽内还设有弹簧;所述弹簧位于一号凹槽的槽底与滑棒之间,弹簧的一端连接着一号凹槽的槽底,另一端连接着滑棒;工作时,支脚与地面接触前,弹簧会带动滑棒沿着一号凹槽滑动,使得滑棒在弹簧的作用下伸出一号凹槽,保证了无人机落在地面上时,滑棒能够与地面最先接触,达到了缓冲作用,同时滑棒在弹簧的作用下抵在地面的上端,保证了支脚的受力均匀,防止支脚受力不均匀,造成支脚与电动推杆端部断裂的情况,进而提高了支脚的使用寿命,同时提高了支脚在使用过程中的稳定性,同时通过滑棒提高了支脚与地面的摩擦力,从而防止支脚在地面上打滑的情况。
优选的,所述支脚的下端设置有环形槽;所述环形槽围绕在相对应的一号凹槽周围,环形槽内安装有气囊;所述气囊的内部通过气管连通着一号凹槽的内部,所述气囊的一部分在充气的作用下会露出环形槽;工作时,滑棒在无人机的重力作用下会对弹簧进行压缩,同时滑棒会沿着一号凹槽滑动,使得一号凹槽内部的气压受到压缩后压强增大,使得一号凹槽内部的气体沿着气管排入气囊内,从而使得气囊在充气的作用而增大,气囊增大后露出环形槽,使得气囊与地面结构后,对无人机起到了缓冲作用,防止无人机内部的元件在落地产生震动力的作用而松动,影响无人机的正常使用,同时在与弹簧对地面进行缓冲的作用下相配合,进一步提高了缓冲效果,使得高速公路巡查无人机的使用寿命进一步得到提高。
优选的,所述气囊一部分的外壁上设置有凸起;所述凸起随机分布在气囊的外壁上,凸起设置成圆锥形;工作时,气囊撑大过程中也会带动凸起运动,从而使得凸起在气囊的带动下移动至环形槽的槽口,从而使得气囊与地面接触的同时还能够带动凸起与地面接触,增大了气囊与地面之间的摩擦力,防止支脚与地面出现打滑的现象,造成无人机的螺旋桨与周围物体发生磕碰的情况,进而提高了无人机落在地面后的稳定性。
优选的,所述支脚的外壁上设置有二号凹槽;所述二号凹槽连通着一号凹槽的槽底,二号凹槽的槽壁上通过扭簧扭接着V形板;所述V形板的一端位于一号凹槽与滑棒之间,另一端伸出二号凹槽的外部;工作时,滑棒受到无人机自身的压力后会对弹簧进行压缩,使得滑棒沿着一号凹槽向着一号凹槽的槽底滑动,滑棒滑动过程中会带动V形板的一端移动,使得V形板在滑棒的带动下绕着二号凹槽的槽壁转动,从而使得V形板的另一端在转动作用下与地面接触,使得V形板的另一端卡在地面上,进一步增大了支脚与地面之间的摩擦力,防止无人机在潮湿的地面上出现打滑的情况;当支脚远离地面时,V形板的一端在扭簧的作用下抵在滑棒上,使得V形板收紧在二号凹槽内,减小了V形板在空气中的阻力。
优选的,所述二号凹槽与环形槽连通,所述V形板转动后能够对气囊进行挤压;工作时,滑棒带动V形板绕着二号凹槽的槽壁转动后,V形板与气囊接触,从而使得气囊在V形板的挤压作用下而变形,使得气囊在挤压后凹陷的部分通过气囊靠近环形槽槽口的部分进行补充,进而增大了靠近环形槽槽口部分的气囊的体积,进而提高了气囊的实际应用效果,同时气囊内部和一号凹槽内部的气压在V形板的挤压作用而增大,进而使得缓冲效果得到提高。
本发明的有益效果如下:
1.本发明通过压力传感器感应平衡棒对其挤压的压力与电动推杆带动支脚运动相配合,从而保证了无人机在落地后保持重力平衡状态,使得无人机在落在不平整的路面上时,不会造成无人机侧翻的情况,进而保护了无人机元件不受损坏,提高了高速公路巡查无人机的实用性,同时本发明还减少了支脚带来的空气阻力,节约了无人机运行所耗的电能。
2.本发明中支脚与地面接触前,弹簧会带动滑棒沿着一号凹槽滑动,使得滑棒在弹簧的作用下伸出一号凹槽,保证了无人机落在地面上时,滑棒能够与地面最先接触,达到了缓冲作用,同时滑棒在弹簧的作用下抵在地面的上端,保证了支脚的受力均匀,防止支脚受力不均匀,造成支脚与电动推杆端部断裂的情况,进而提高了支脚的使用寿命,同时提高了支脚在使用过程中的稳定性,同时通过滑棒提高了支脚与地面的摩擦力,从而防止支脚在地面上打滑的情况。
3.本发明的滑棒在无人机的重力作用下会对弹簧进行压缩,同时滑棒会沿着一号凹槽滑动,使得一号凹槽内部的气压受到压缩后压强增大,使得一号凹槽内部的气体沿着气管排入气囊内,从而使得气囊在充气的作用而增大,气囊增大后露出环形槽,使得气囊与地面结构后,对无人机起到了缓冲作用,防止无人机内部的元件在落地产生震动力的作用而松动,影响无人机的正常使用,同时在与弹簧对地面进行缓冲的作用下相配合,进一步提高了缓冲效果,使得高速公路巡查无人机的使用寿命进一步得到提高。
附图说明
下面结合附图和实施方式对本发明进一步说明。
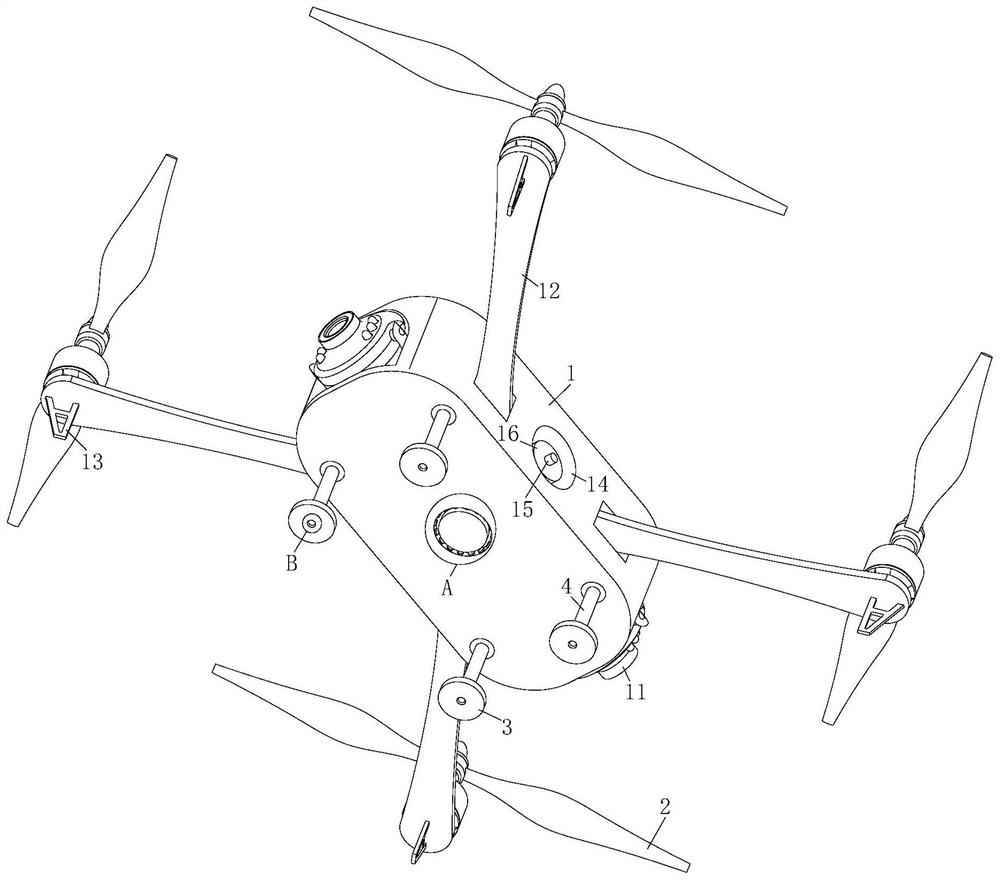
图1是本发明仰视角度下的立体图;
图2是图1中A处放大图;
图3是图1中B处放大图;
图4是本发明俯视角度下的立体图;
图5是本发明的剖视图;
图6是图5中C处放大图;
图7是本发明中支脚的剖视图;
图8是图7中D处放大图;
图9是图7中E处放大图;
图中:本体1、摄像头11、动力臂12、支板13、一号圆槽14、配重棒15、砝码16、台阶孔17、平衡棒18、压力传感器19、螺旋桨2、支脚3、二号圆槽31、距离传感器32、一号凹槽33、滑棒34、弹簧35、环形槽36、气囊361、气管362、凸起363、二号凹槽37、扭簧38、V形板39、电动推杆4。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1至图9所示,本发明所述的一种基于互联网的高速公路巡查无人机,包括本体1、螺旋桨2、支脚3和控制器;所述本体1的两端均安装有摄像头11,本体1的两侧安装有动力臂12;所述动力臂12对称分布在本体1的两侧,动力臂12一端的上部转动连接着螺旋桨2,动力臂12一端的下部固连有支板13;所述本体1的两侧还设置有一号圆槽14;所述一号圆槽14内固连有配重棒15,配重棒15上套有砝码16;所述高速公路巡查无人机的重心位于本体1的中心处;所述本体1中心处的下端设置有台阶孔17;所述台阶孔17的孔底球接着平衡棒18;当本体1的上下两端面与水平面平行时,平衡棒18的端部不与台阶孔17的内壁接触;所述台阶孔17的内壁安装有压力传感器19;所述压力传感器19均匀分布在台阶孔17的内壁上;所述本体1下端的四个拐角固连有电动推杆4;所述电动推杆4的端部固连有支脚3;所述支脚3下端的中心处设置有二号圆槽31;所述二号圆槽31内安装有距离传感器32;所述控制器用于控制高速公路巡查无人机自动运行;
工作时,现有的巡查无人机续航时间为1-2小时,远远达不到完成对高速公路巡查,因此需要对无人机的电池进行更换,在高速公路上更换不利于工作人员的安全,因此工作人员会将无人机降落在高速公路的外侧,由于外侧的路面坑坑洼洼,使得无人机在落下后由于重心不稳会造成侧翻的情况,从而造成无人机的损坏,进而影响无人机的正常使用;因此本发明中需要对无人机进行电池更换时,工作人员通过手柄控制无人机降落在高速公路外侧,无人机靠近地面时,距离感应器感应到支脚3距离地面小于30厘米时,控制器控制电动推杆4伸长,电动推杆4带动支脚3移动,使得螺旋桨2停止转动后,支脚3起到对无人机的支撑作用,当本体1的两端面与路面倾斜后,平衡棒18的端部与台阶孔17的内壁接触,压力传感器19受到挤压后产生压力数值,从而将结果反馈至控制器,控制器再控制远离有压力数值的压力传感器19的电动推杆4缩短,使得平衡棒18的端部不与台阶孔17的内壁接触,保证了本体1的两端面与水平面平行,防止本体1在重心不稳的情况下而侧翻,造成零件损坏的情况,通过支板13进一步起到对螺旋桨2防护作用,防止无人机支脚3失效,造成无人机损坏的情况,当无人机远离地面过程中,距离感应器感应支脚3距离地面大于30厘米后,控制器控制电动推杆4缩短,从而通过电动推杆4将支脚3收起,减少了支脚3带来的空气阻力,节约了无人机运行所耗的电能;通过增减砝码16来调节无人机的重力中心与位于本体1的中心处;本发明通过压力传感器19感应平衡棒18对其挤压的压力与电动推杆4带动支脚3运动相配合,从而保证了无人机在落地后保持重力平衡状态,使得无人机在落在不平整的路面上时,不会造成无人机侧翻的情况,进而保护了无人机元件不受损坏,提高了高速公路巡查无人机的实用性,同时本发明还减少了支脚3带来的空气阻力,节约了无人机运行所耗的电能。
作为本发明的一种实施方式,所述支脚3的下端设置有一号凹槽33;所述一号凹槽33均匀分布在支脚3的下端,一号凹槽33内滑动连接着滑棒34,一号凹槽33内还设有弹簧35;所述弹簧35位于一号凹槽33的槽底与滑棒34之间,弹簧35的一端连接着一号凹槽33的槽底,另一端连接着滑棒34;工作时,支脚3与地面接触前,弹簧35会带动滑棒34沿着一号凹槽33滑动,使得滑棒34在弹簧35的作用下伸出一号凹槽33,保证了无人机落在地面上时,滑棒34能够与地面最先接触,达到了缓冲作用,同时滑棒34在弹簧35的作用下抵在地面的上端,保证了支脚3的受力均匀,防止支脚3受力不均匀,造成支脚3与电动推杆4端部断裂的情况,进而提高了支脚3的使用寿命,同时提高了支脚3在使用过程中的稳定性,同时通过滑棒34提高了支脚3与地面的摩擦力,从而防止支脚3在地面上打滑的情况。
作为本发明的一种实施方式,所述支脚3的下端设置有环形槽36;所述环形槽36围绕在相对应的一号凹槽33周围,环形槽36内安装有气囊361;所述气囊361的内部通过气管362连通着一号凹槽33的内部,所述气囊361的一部分在充气的作用下会露出环形槽36;工作时,滑棒34在无人机的重力作用下会对弹簧35进行压缩,同时滑棒34会沿着一号凹槽33滑动,使得一号凹槽33内部的气压受到压缩后压强增大,使得一号凹槽33内部的气体沿着气管362排入气囊361内,从而使得气囊361在充气的作用而增大,气囊361增大后露出环形槽36,使得气囊361与地面结构后,对无人机起到了缓冲作用,防止无人机内部的元件在落地产生震动力的作用而松动,影响无人机的正常使用,同时在与弹簧35对地面进行缓冲的作用下相配合,进一步提高了缓冲效果,使得高速公路巡查无人机的使用寿命进一步得到提高。
作为本发明的一种实施方式,所述气囊361一部分的外壁上设置有凸起363;所述凸起363随机分布在气囊361的外壁上,凸起363设置成圆锥形;工作时,气囊361撑大过程中也会带动凸起363运动,从而使得凸起363在气囊361的带动下移动至环形槽36的槽口,从而使得气囊361与地面接触的同时还能够带动凸起363与地面接触,增大了气囊361与地面之间的摩擦力,防止支脚3与地面出现打滑的现象,造成无人机的螺旋桨2与周围物体发生磕碰的情况,进而提高了无人机落在地面后的稳定性。
作为本发明的一种实施方式,所述支脚3的外壁上设置有二号凹槽37;所述二号凹槽37连通着一号凹槽33的槽底,二号凹槽37的槽壁上通过扭簧38扭接着V形板39;所述V形板39的一端位于一号凹槽33与滑棒34之间,另一端伸出二号凹槽37的外部;工作时,滑棒34受到无人机自身的压力后会对弹簧35进行压缩,使得滑棒34沿着一号凹槽33向着一号凹槽33的槽底滑动,滑棒34滑动过程中会带动V形板39的一端移动,使得V形板39在滑棒34的带动下绕着二号凹槽37的槽壁转动,从而使得V形板39的另一端在转动作用下与地面接触,使得V形板39的另一端卡在地面上,进一步增大了支脚3与地面之间的摩擦力,防止无人机在潮湿的地面上出现打滑的情况;当支脚3远离地面时,V形板39的一端在扭簧38的作用下抵在滑棒34上,使得V形板39收紧在二号凹槽37内,减小了V形板39在空气中的阻力。
作为本发明的一种实施方式,所述二号凹槽37与环形槽36连通,所述V形板39转动后能够对气囊361进行挤压;工作时,滑棒34带动V形板39绕着二号凹槽37的槽壁转动后,V形板39与气囊361接触,从而使得气囊361在V形板39的挤压作用下而变形,使得气囊361在挤压后凹陷的部分通过气囊361靠近环形槽36槽口的部分进行补充,进而增大了靠近环形槽36槽口部分的气囊361的体积,进而提高了气囊361的实际应用效果,同时气囊361内部和一号凹槽33内部的气压在V形板39的挤压作用而增大,进而使得缓冲效果得到提高。
工作时,工作人员会将无人机降落在高速公路的外侧,由于外侧的路面坑坑洼洼,使得无人机在落下后由于重心不稳会造成侧翻的情况,从而造成无人机的损坏,进而影响无人机的正常使用;因此本发明中需要对无人机进行电池更换时,工作人员通过手柄控制无人机降落在高速公路外侧,无人机靠近地面时,距离感应器感应到支脚3距离地面小于30厘米时,控制器控制电动推杆4伸长,电动推杆4带动支脚3移动,使得螺旋桨2停止转动后,支脚3起到对无人机的支撑作用,当本体1的两端面与路面倾斜后,平衡棒18的端部与台阶孔17的内壁接触,压力传感器19受到挤压后产生压力数值,从而将结果反馈至控制器,控制器再控制远离有压力数值的压力传感器19的电动推杆4缩短,使得平衡棒18的端部不与台阶孔17的内壁接触,保证了本体1的两端面与水平面平行,防止本体1在重心不稳的情况下而侧翻,造成零件损坏的情况,通过支板13进一步起到对螺旋桨2防护作用,防止无人机支脚3失效,造成无人机损坏的情况,当无人机远离地面过程中,距离感应器感应支脚3距离地面大于30厘米后,控制器控制电动推杆4缩短,从而通过电动推杆4将支脚3收起,减少了支脚3带来的空气阻力,节约了无人机运行所耗的电能;通过增减砝码16来调节无人机的重力中心与位于本体1的中心处;支脚3与地面接触前,弹簧35会带动滑棒34沿着一号凹槽33滑动,使得滑棒34在弹簧35的作用下伸出一号凹槽33,保证了无人机落在地面上时,滑棒34能够与地面最先接触,达到了缓冲作用,同时滑棒34在弹簧35的作用下抵在地面的上端,保证了支脚3的受力均匀,防止支脚3受力不均匀,造成支脚3与电动推杆4端部断裂的情况,进而提高了支脚3的使用寿命,同时提高了支脚3在使用过程中的稳定性,同时通过滑棒34提高了支脚3与地面的摩擦力,从而防止支脚3在地面上打滑的情况;滑棒34在无人机的重力作用下会对弹簧35进行压缩,同时滑棒34会沿着一号凹槽33滑动,使得一号凹槽33内部的气压受到压缩后压强增大,使得一号凹槽33内部的气体沿着气管362排入气囊361内,从而使得气囊361在充气的作用而增大,气囊361增大后露出环形槽36,使得气囊361与地面结构后,对无人机起到了缓冲作用,防止无人机内部的元件在落地产生震动力的作用而松动,影响无人机的正常使用,同时在与弹簧35对地面进行缓冲的作用下相配合,进一步提高了缓冲效果,使得高速公路巡查无人机的使用寿命进一步得到提高;气囊361撑大过程中也会带动凸起363运动,从而使得凸起363在气囊361的带动下移动至环形槽36的槽口,从而使得气囊361与地面接触的同时还能够带动凸起363与地面接触,增大了气囊361与地面之间的摩擦力,防止支脚3与地面出现打滑的现象,造成无人机的螺旋桨2与周围物体发生磕碰的情况,进而提高了无人机落在地面后的稳定性;滑棒34受到无人机自身的压力后会对弹簧35进行压缩,使得滑棒34沿着一号凹槽33向着一号凹槽33的槽底滑动,滑棒34滑动过程中会带动V形板39的一端移动,使得V形板39在滑棒34的带动下绕着二号凹槽37的槽壁转动,从而使得V形板39的另一端在转动作用下与地面接触,使得V形板39的另一端卡在地面上,进一步增大了支脚3与地面之间的摩擦力,防止无人机在潮湿的地面上出现打滑的情况;当支脚3远离地面时,V形板39的一端在扭簧38的作用下抵在滑棒34上,使得V形板39收紧在二号凹槽37内,减小了V形板39在空气中的阻力;滑棒34带动V形板39绕着二号凹槽37的槽壁转动后,V形板39与气囊361接触,从而使得气囊361在V形板39的挤压作用下而变形,使得气囊361在挤压后凹陷的部分通过气囊361靠近环形槽36槽口的部分进行补充,进而增大了靠近环形槽36槽口部分的气囊361的体积,进而提高了气囊361的实际应用效果,同时气囊361内部和一号凹槽33内部的气压在V形板39的挤压作用而增大,进而使得缓冲效果得到提高。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种基于互联网的高速公路巡查无人机
- 一种基于无人机的高速公路边坡巡查的路径优化方法