无人飞行器及防水容器
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及一种无人飞行器及防水容器。
背景技术
预计今后在海上运输中使用无人飞行器(无人机)的机会将会增加。现已存在一种无人机,其具备具有浮力的部件(例如发泡苯乙烯等)、中空的空气室等浮舟(float)(专利文献1及2)。
背景技术文献
专利文献
专利文献1:国际公开2018/042610号公报
专利文献2:日本专利特开2015-117003号公报
发明内容
[发明要解决的问题]
理想状态为使浮舟尽可能小,但为了应对大型货物,需要大的浮舟。因此,希望可以将容器活用作浮舟,但如果容器未完全密闭,就不能作为浮舟发挥作用。或者,如果容器的门未完全关闭,就无法保持防水性。
本发明的目的在于确保容器的密闭性。
[解决问题的技术手段]
(1)本发明的无人飞行器的特征在于:具备用来收容货物的防水容器,且所述防水容器具有:容器主体,在所述无人飞行器的着陆状态下在底面具有开口;防水门,向外打开,以能将所述开口关闭的方式安装在所述容器主体;弹性密封件,介置在所述容器主体与所述防水门之间,用来将所述防水门液密性地关闭;第1关门机构,保持所述防水门的第1关门状态;以及第2关门机构,在第2关门状态下,阻止所述防水门朝开门方向移动,所述第2关门状态是从所述第1关门状态,将所述防水门朝与所述弹性密封件的弹力对抗的方向推压的状态。
根据本发明,当防水门被外力推压时,可将防水门之密闭性从第1关门状态提升到第2关门状态,从而能够确保防水容器的密闭性。
(2)根据(1)所述的无人飞行器,其特征也可在于:所述防水门是包含第1门及第2门的双开门。
(3)根据(1)或(2)所述的无人飞行器,其特征也可在于:所述弹性密封件也介置在所述第1门与所述第2门之间。
(4)根据(1)至(3)中任一项所述的无人飞行器,其特征也可在于:所述第1关门机构及所述第2关门机构包含于多级锁定机构。
(5)根据(1)至(4)中任一项所述的无人飞行器,其特征也可在于:还具有安装在所述容器主体的压力调整阀。
(6)根据(1)至(5)中任一项所述的无人飞行器,其特征也可在于:所述防水门具备浮舟。
(7)根据(1)至(6)中任一项所述的无人飞行器,其特征也可在于:所述防水门具有沿着打开及关闭的旋转轴的第1侧端部、及处于所述第1侧端部的相反侧的第2侧端部,所述防水门的外表面是使所述旋转轴平行移动而描绘出的面,且向所述第1侧端部的方向倾斜。
(8)根据(7)所述的无人飞行器,其特征也可在于:所述外表面为弯曲面。
(9)根据(1)至(8)中任一项所述的无人飞行器,其特征也可在于:还具有降落伞。
(10)根据(1)至(9)中任一项所述的无人飞行器,其特征也可在于:还具有进行信号的发送及接收中的至少一种的无线设备。
(11)本发明的防水容器的特征在于,具有:容器主体,在底面具有开口;双开防水门,向外打开,以能将所述开口关闭的方式安装在所述容器主体,且包含第1门及第2门;弹性密封件,介置在所述第1门及所述第2门各自与所述容器主体之间,用来将所述防水门液密性地关闭;第1关门机构,保持所述第1门及所述第2门各自的第1关门状态;以及第2关门机构,在第2关门状态下,阻止所述第1门及所述第2门各自朝开门方向移动,所述第2关门状态是从所述第1关门状态,将所述第1门及所述第2门各自朝与所述弹性密封件的弹力对抗的方向推压的状态。
根据本发明,当防水门被外力推压时,防水门的密闭性从第1关门状态提升到第2关门状态。由此,能够确保防水容器的密闭性。
(12)根据(11)所述的防水容器,其特征也可在于:所述弹性密封件也介置在所述第1门与所述第2门之间。
(13)根据(11)或(12)所述的防水容器,其特征也可在于:所述第1关门机构及所述第2关门机构包含于多级锁定机构。
(14)根据(11)至(13)中任一项所述的防水容器,其特征也可在于:还具有安装在所述容器主体的压力调整阀。
(15)根据(11)至(14)中任一项所述的防水容器,其特征也可在于:所述第1门及所述第2门分别具备浮舟。
(16)根据(11)至(15)中任一项所述的防水容器,其特征也可在于:所述第1门及所述第2门分别具有沿着打开及关闭的旋转轴的第1侧端部、及处于所述第1侧端部的相反侧的第2侧端部;所述第1门及所述第2门各自的外表面是使所述旋转轴平行移动而描绘出的面,且向所述第1侧端部的方向倾斜。
(17)根据(16)所述的防水容器,其特征也可在于:所述倾斜面为弯曲面。
附图说明
图1是实施方式的无人飞行器的俯视图。
图2是图1所示的无人飞行器的侧视图。
图3是装置主体的功能框图。
图4是表示防水容器的详情的侧视图。
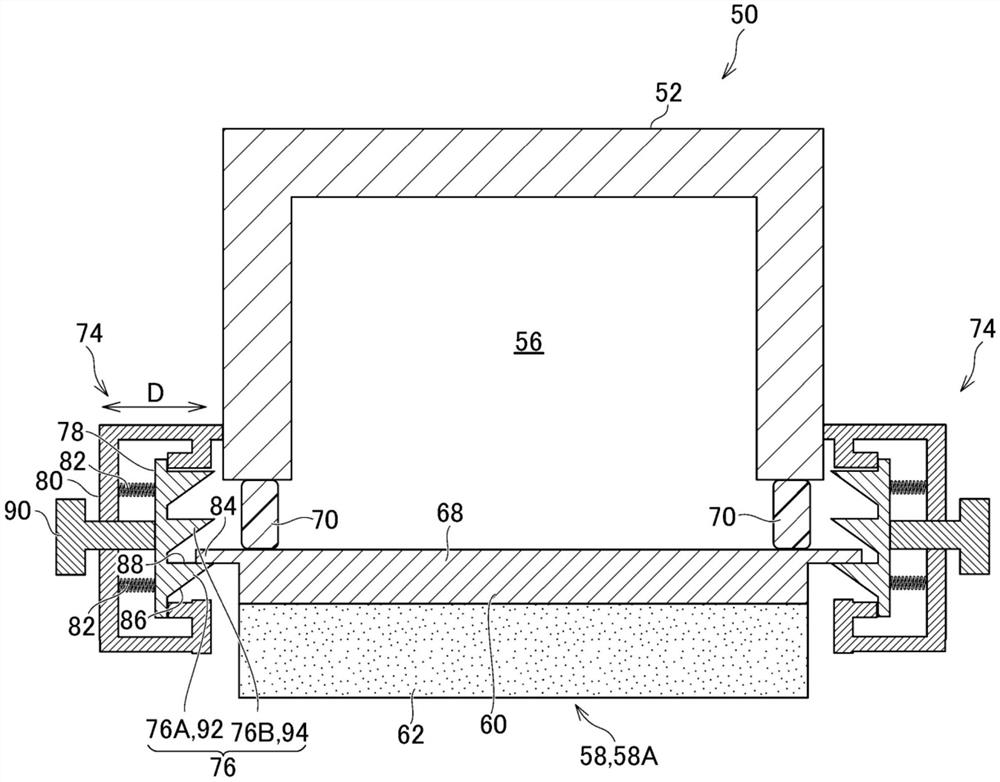
图5是图4所示的防水容器的V-V线剖视图。
图6是表示防水门打开的状态的图。
图7是表示防水门的第2关门状态的图。
图8是表示实施方式的无人飞行器的第1变化例的图。
图9是表示实施方式的无人飞行器的第2变化例的图。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。但本发明在不脱离其主旨的范围内能以各种形态实施,而并非限定于以下所例示的实施方式的记载内容被加以解释。
图1是实施方式的无人飞行器的俯视图。图2是图1所示的无人飞行器的侧视图。在以下说明中,将X1方向及X2方向分别称为右方及左方。将Y1方向及Y2方向分别称为前方及后方。将沿着由X1-X2及Y1-Y2所形成的平面的方向称为水平方向。将Z1方向及Z2方向分别称为上方及下方。
无人飞行器用于输送生活用品、或食材、电子设备、书籍等货物10。配送目的地包括孤岛,飞行路径包括大海、河流及湖泊等水上路径。无人飞行器能以无线方式被远程操纵,也可以在指定目标位置(着陆位置)之后自主飞行。
无人飞行器是能在垂直方向上起飞及降落的多轴飞行器。无人飞行器具有多个螺旋桨12、以及使螺旋桨12分别旋转的多个马达14。马达14的位置可为螺旋桨12的中心正下方,也可并非正下方。螺旋桨12及马达14在以装置主体16为中心的圆周方向上等间隔地配置。无人飞行器在其中心部具有装置主体16。
无人飞行器具有多个从装置主体16沿水平方向延伸的支撑臂18。支撑臂18在远离装置主体16的位置支撑马达14。支撑臂18具有从马达14的位置进一步延伸的延长部20。延长部20在其端部支撑着包围多个螺旋桨12整体的防护索(guard cable)22。
无人飞行器具有支撑框架24。支撑框架24例如具有支撑装置主体16及电池26的框架上部28、以及从框架上部28朝下方延伸的框架下部30。框架上部28具有在左右方向上分离且在水平方向上延伸的2根水平杆32。
框架下部30具有多个脚部34,所述脚部34从水平杆32朝下方延伸。框架下部30具有多个下端杆36,所述下端杆36在水平方向上延伸且连接于多个脚部34的下端。框架下部30的下端(即下端杆36)位于比下文所述的防水容器50的下端更靠下方,当无人飞行器着陆时将无人飞行器支撑在地面上,并且防止防水容器50与地面接触。
支撑框架24的构造并不限于所述示例。例如,支撑框架24也可以具有供安装电池26及装置主体16的板状支撑台,脚部34从该支撑台朝下方延伸。
无人飞行器具有1个或多个电池26。马达14由从电池26供给的电力驱动。电池26配置在无人飞行器的中心部。电池26由配置在无人飞行器的中心部的支撑框架24支撑。
图3是装置主体16的功能框图。装置主体16具有控制装置38、马达驱动装置40、无线设备42及传感器组44。装置主体16具有收容控制装置38及无线设备42等的壳体46(图1及图2)。另外,装置主体16也可以除包含用来驱动马达14的电池26以外,另外还包含蓄积有要供给至控制装置38的电力的电池。
传感器组44例如包含三轴陀螺仪传感器、三轴加速度传感器等。三轴陀螺仪传感器例如输出与无人飞行器的俯仰角(pitch angle)或翻滚角(roll angle)、偏航角(yawangle)对应的信号。三轴加速度传感器输出与无人飞行器在前后方向上的加速度、左右方向上的加速度、及上下方向上的加速度对应的信号。传感器组44所具有的传感器的种类并不限于此。例如,传感器组44也可以还具有地磁传感器,所述地磁传感器输出与无人飞行器的方向对应的信号。
无线设备42是负责信号的发送或接收中的至少一种的装置。无线设备42例如包含GPS(Global Positioning System,全球定位系统)接收机。无线设备42例如包含信标发送机,所述信标发送机发出包含自身的位置信息的信号即信标。利用信标,能够特定出去向不明的无人飞行器的位置并将其快速收回。
无线设备42也可以包含接收机及发送机,所述接收机接收来自外部的操作输入装置(未图示)的指令,所述发送机向外部的操作输入装置发送无人飞行器的状态。外部的操作输入装置例如为供无人飞行器的使用者(监控飞行的操作员)进行操作的个人计算机或专用的输入装置。无线设备42将接收到的信号的内容向控制装置38输出,或发送从控制装置38获取的信号。无人飞行器也可以具有与无线设备42连接的天线48。天线48例如安装在装置主体16的上部(参照图2)。
马达驱动装置40从电池26接受电力,并对马达14供给与从控制装置38收到的指令值对应的电力。马达14以与从马达驱动装置40供给的电力(电压)对应的速度旋转。此外,无人飞行器针对多个马达14分别具有马达驱动装置40。
控制装置38包含存储装置、及执行存储在存储装置中的程序的微处理器。控制装置38基于从传感器组44输入的信号(信息)与从无线设备42输入的信号(信息)控制马达14。控制装置38基于从传感器组44输入的信号控制多个马达14各自的旋转速度,由此来控制无人飞行器的姿势(俯仰角、翻滚角、偏航角)、及移动(前进、后退、上升、下降、向左移动、向右移动)。
控制装置38也可以判断无人飞行器是否已着水或着陆。并且,当判断为无人飞行器已着水或着陆时,控制装置38可以通过无线设备42来发送这一情况。
构成装置主体16的零件未必收容在共用的壳体46中。例如,收容马达驱动装置40的壳体与收容控制装置38及无线设备42的壳体也可以分开。另外,收容控制装置38的壳体与收容无线设备42的壳体也可以分开。
理想的是收容马达14、电池26、传感器组44、控制装置38等的壳体(例如壳体46)具备防水性能。利用所述构成,无人飞行器即使在着水后翻倒也能避免故障。
无人飞行器具有用来收容货物10的防水容器50(参照图2)。防水容器50例如为长方体。防水容器50安装在支撑框架24。例如,防水容器50安装在框架上部28的下侧。并且,防水容器50位于多个脚部34的内侧。装置主体16位于防水容器50的上侧。
防水容器50液密地构成。即,防水容器50构成为外部水分不会渗入到防水容器50内部。通过使防水容器50液密,而当无人飞行器着水时,可获得防水容器50的浮力。
图4是表示防水容器50的详情的侧视图。图5是图4所示的防水容器50的V-V线剖视图。防水容器50具有容器主体52。容器主体52由碳、塑料或金属等不透水的素材构成。
在容器主体52安装有压力调整阀54(例如止回阀)。压力调整阀54在内部压力上升时排出气体,也可以在合适的内部压力下自动关闭。
容器主体52在无人飞行器的着陆状态下在底面具有开口56,可以从开口56搬入或搬出货物10(图2)。在容器主体52安装有防水门58,以将开口56关闭。防水门58的打开及关闭可手动进行,也可以通过未图示的致动器进行。
防水门58具有门主体60。门主体60由碳、塑料或金属等不透水的素材构成。防水门58具备浮舟62。例如,在门主体60的外侧贴附着浮舟62。浮舟62例如为树脂发炮体、或填充有气体的袋或箱。作为树脂发炮体,有发泡聚苯乙烯、聚氯乙烯泡沫等。浮舟62并不限定于构成防水门58的整个外表面的示例,其位置及形状能够变化。
图6是表示防水门58打开的状态的图。防水门58是向外打开且包含第1门58A及第2门58B的双开门。防水门58(第1门58A及第2门58B各自)具有沿着打开及关闭的旋转轴64的第1侧端部66、及处于第1侧端部66的相反侧的第2侧端部68。防水门58(第1门58A及第2门58B各自)的外表面(浮舟62的表面)是使旋转轴64平行移动而描绘出的面,且向第1侧端部66的方向倾斜。外表面为弯曲面。
防水容器50具有用于将防水门58液密性地关闭的弹性密封件70。弹性密封件70介置在容器主体52与防水门58之间。弹性密封件70在容器主体52与防水门58之间被压缩(发生弹性变形)。由此,容器主体52与防水门58之间的间隙消失而达到液密。
在第1门58A与第2门58B之间也介置弹性密封件72(例如第1弹性密封件72A及第2弹性密封件72B)。第1弹性密封件72A具有凹部,第2弹性密封件72B具有凸部,凹部与凸部嵌合。如图6所示,通过使侧壁倾斜以扩大凹部,从而使凸部容易进入到凹部中。图6的示例中,在第1弹性密封件72A及第2弹性密封件72B的下方未设置浮舟,但也可以设置浮舟。
防水容器50具有防水门58的锁定机构74(例如闩锁)。锁定机构74在与关闭后的防水门58的第2侧端部68(与旋转轴64为相反侧)对应的位置,如图5所示,设置在容器主体52(分别沿旋转轴64的两侧)上。锁定机构74包含排列有多个爪76(第1爪76A及第2爪76B)的锁定零件78。锁定零件78被与容器主体52的安装部80保持为仅能够在沿着旋转轴64的方向D上直线移动。另外,锁定零件78配置在防水门58的外侧,弹簧82被压缩,而对锁定零件78施加朝防水门58接近的方向的力。
防水门58被关闭时,其一部分(卡合部84)碰到第1爪76A的倾斜外表面86。倾斜外表面86相对于锁定零件78的直线移动方向倾斜。倾斜外表面86相对于朝向防水门58的开关轨迹的方向倾斜。因此,当防水门58的卡合部84推压外表面时,锁定零件78与弹簧82的力相对向地朝远离防水门58的方向移动。并且,卡合部84卡合于第1爪76A的内表面88。内表面88例如与锁定零件78的直线移动方向平行,不相对于该方向倾斜。
在锁定零件78安装着销90。通过与弹簧82的力相对向地朝远离防水门58的方向拉拽销90,可解除第1爪76A与卡合部84的卡合。
防水容器50具有第1关门机构92(例如第1爪76A)。第1关门机构92包含于多级(2级或2级以上)锁定机构74。利用第1关门机构92来保持防水门58的第1关门状态。如图4所示,第1门58A及第2门58B分别卡合于第1爪76A(图5)的状态为第1关门状态。在第1关门状态下,弹性密封件70的压缩较少,所以存在密闭性不充分的情况。
图7是表示防水门58的第2关门状态的图。防水容器50具有第2关门机构94(例如第2爪76B)。第2关门机构94包含于多级锁定机构74。第2关门机构94在第2关门状态下,阻止防水门58朝开门方向移动。第2关门状态是从第1关门状态,将防水门58朝与弹性密封件70的弹力相对抗的方向推压的状态。例如,当无人飞行器着水时,有时防水门58会受到推压。
根据本实施方式,当防水门58被外力推压时,可使防水门58的密闭性从第1关门状态提升到第2关门状态,从而能够确保防水容器50的密闭性。尤其是如果防水门58的外表面为弯曲面,那么外力的作用方向更容易提高防水门58的密闭性。作为外力的示例,可列举防水门58与水碰撞所产生的冲击及浮舟62所产生的浮力。
图8是表示实施方式的无人飞行器的第1变化例的图。所述防水门58会因无人飞行器着水而密闭性提高,因而理想的是在防水门58朝下的状态下着水。因此,无人飞行器如图8所示具有降落伞196。降落伞196例如在侦测到无人飞行器的异常后展开。由此,能够在防水门58朝向下方的状态下,也就是在无人飞行器为水平或接近水平的姿势下,使防水容器50着水。
图9是表示实施方式的无人飞行器的第2变化例的图。该示例中,在防水门258的旋转轴264周围存在第1关门机构292(例如第1爪276A)及第2关门机构294(例如第2爪276B)。第1爪276A及第2爪276B因防水门258打开及关闭而绕旋转轴264移动。
第1爪276A及第2爪276B即使想朝防水门258打开的方向移动,也会被卡合部284阻止。卡合部284与控制杆(lever)298一体形成。控制杆298以能够绕与防水门258的旋转轴264平行的轴摆动的方式安装在容器主体252。另外,被拉伸后的弹簧282对控制杆298施加使卡合部284朝第1爪276A及第2爪276B靠近的方向的力。当防水门258朝关闭的方向移动时,控制杆298以通过第1爪276A及第2爪276B将卡合部284向上推的方式摆动。由此,可不受卡合部284限制地将防水门258关闭。此外,当要解除第1关门状态或第2关门状态时,只要使控制杆298朝卡合部284远离第1爪276A或第2爪276B的方向移动即可。另外,因控制杆298贯通容器主体252,所以利用外罩200进行覆盖而实现了防水。
本发明并不限定于所述实施方式,能够进行各种变化。例如,实施方式中说明的构成可由实质上相同的构成、发挥相同作用效果的构成或能达到相同目的的构成进行替换。
- 无人飞行器及防水容器
- 阀门、液体容器及无人飞行器