无人机系统、无人机、操纵器、无人机系统的控制方法及无人机系统控制程序
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及无人机系统、飞行器(无人机),尤其涉及提高安全性的无人机、无人机系统的控制方法以及无人机系统控制程序。
背景技术
一般被称为无人机的小型无人直升机(多旋翼直升机)的应用正在推进。作为其重要的应用领域之一,可列举向农田(农场)进行农药或液肥等的药剂播撒(例如,专利文献1)。与欧美相比,在农田狭小的日本,适合使用无人机而不是有人的飞机或直升机的情况较多。
通过准天顶卫星系统或RTK-GPS(Real Time Kinematic-Global PositioningSystem)等技术,使无人机在飞行中能够以厘米单位准确地得知本机的绝对位置,由此,在日本,即使在典型的狭小复杂的地形的农田中,也使得人手进行的操纵为最小限度而能够自主地飞行,并高效且准确地进行药剂播撒。
另一方面,对于面向农业用的药剂播撒的自主飞行型无人机,有难可谓对安全性的考虑充分的情况。由于搭载了药剂的无人机的重量为数十公斤,因此在发生掉到人上等事故的情况下很有可能导致严重后果。另外,通常,无人机的操作者不是专家,因此需要防误的机制,但对此的考虑也不充分。到目前为止,虽然存在以人类的操纵为前提的无人机的安全性技术(例如,专利文献2),但不存在用于应对特别是面向农业用的药剂播撒的自主飞行型无人机所特有的安全性课题的技术。
现有技术文献
专利文献
专利文献1:专利公开公报日本特开2001-120151
专利文献2:专利公开公报日本特开2017-163265
发明内容
发明所要解决的课题
能够提供一种即使在自主飞行时也能够维持高安全性的无人机,即无人飞行器。
用于解决课题的技术方案
为了达到上述目的,本发明的一个方面所涉及的无人机系统是操纵器与无人机通过网络彼此连接并彼此协调动作的无人机系统,所述无人机具备:飞行控制部;飞行开始指令接收部,其接收来自使用者的飞行开始命令;无人机判定部,其判定所述无人机本身所具有的构成是否在正常的范围进行动作;以及外部环境判定部,其判定所述无人机的外部环境是否适合所述无人机的飞行,所述无人机系统具有至少包括起飞诊断状态的彼此不同的多个状态,所述无人机系统通过满足按每个所述状态而确定的条件来转移到与所述条件对应的其他的状态,所述起飞诊断状态至少包括无人机判定状态和外部环境判定状态,所述无人机判定状态是所述无人机判定部判定所述无人机本身的构成的状态,所述外部环境判定状态是所述外部环境判定部判定所述外部环境的状态,所述无人机系统在接收到所述飞行开始命令时,转移到所述起飞诊断状态后使所述无人机起飞。
另外,也可以构成为,所述无人机判定部判定的所述构成包括电池、电动机以及传感器当中的至少一个。
另外,也可以构成为,所述无人机的外部环境包括有无成为对所述无人机与所述操纵器进行连接的电波的妨碍的外部干扰、GPS的接收灵敏度、气温、所述无人机的周围的风速、天气以及地磁的状况当中的至少一个。
另外,也可以构成为,在所述外部环境判定部判定为所述外部环境不适合所述无人机的飞行的情况下,所述无人机保持着陆而待机。
另外,也可以构成为,所述无人机系统在所述起飞诊断状态下确认所述操纵器的电源容量,在所述操纵器的电源容量为给定值以下的情况下,报告该情况。
另外,也可以构成为,所述无人机系统还具有向所述无人机发送紧急停止指令的紧急用操纵器,所述无人机系统在所述起飞诊断状态下确认所述紧急用操纵器的电源容量,并在所述紧急用操纵器的电源容量为给定值以下的情况下报告该情况。
另外,也可以构成为,所述无人机系统在接收到所述飞行开始命令时,转移到所述无人机判定状态,并在所述无人机判定状态下判定为所述无人机本身的状态处于正常的范围时,转移到所述外部环境判定状态,且在所述外部环境判定状态下判断为所述外部环境适合所述无人机的飞行时,使所述无人机的起飞动作开始。
另外,也可以构成为,所述无人机还具备存储与所述无人机的飞行计划有关的信息的飞行计划存储部,所述多个状态还包括确认与所述飞行计划存储部中存储的所述飞行计划有关的信息的飞行计划确认状态。
另外,也可以构成为,所述无人机系统在接收到所述飞行开始命令时,转移到所述无人机判定状态,并在所述无人机判定状态下判定为所述无人机本身的状态处于正常的范围时,转移到所述飞行计划确认状态,在所述飞行计划确认状态下确认为所述飞行计划存储部中存储有所述飞行计划时,转移到所述外部环境判定状态,且在所述外部环境判定状态下判断为所述外部环境适合所述无人机的飞行时,使所述无人机的起飞动作开始。
另外,也可以构成为,所述无人机还具备在所述无人机的悬停中进行动作的飞行准备部,所述多个状态还包括所述飞行准备部在悬停中诊断所述无人机的状况的悬停状态。
另外,也可以构成为,在所述悬停状态下,诊断所述无人机的周围的风速、以及所述无人机具有的推进器的推力当中的至少一个。
另外,也可以构成为,所述飞行准备部具有校正部,该校正部进行用于测定所述无人机的高度的传感器、以及用于测定所述无人机的高度的传感器当中的至少一个传感器的校正,在所述悬停状态下,所述校正部进行所述校正。
另外,也可以构成为,所述飞行准备部具有推定所述无人机的重量的重量推定部,在所述悬停状态下,所述重量推定部推定所述无人机的重量。
另外,也可以构成为,所述无人机系统在转移到所述悬停状态后,使伴随着所述无人机的水平移动的飞行开始。
另外,也可以构成为,所述无人机具备以下部件当中的至少一个:基站位置确认部,其确认通过网络与所述无人机彼此连接并彼此协调动作的基站的位置;机体位置确认部,其确认所述无人机的位置;机头确认部,其确认所述无人机的机头的朝向;周边确认部,其确认在所述无人机的周边是否有障碍物;以及机体目视确认部,其促使使用者目视确认所述无人机是否有异常。
本发明的另一方面所涉及的无人机系统的控制方法是操纵器与无人机通过网络彼此连接并彼此协调动作的无人机系统的控制方法,所述无人机具备:飞行控制部;飞行开始指令接收部,其接收来自使用者的飞行开始命令;无人机判定部,其判定所述无人机本身所具有的构成是否在正常的范围进行动作;以及外部环境判定部,其判定所述无人机的外部环境是否适合所述无人机的飞行,所述无人机系统具有至少包括起飞诊断状态的彼此不同的多个状态,所述无人机系统通过满足按每个所述状态而确定的条件来转移到与所述条件对应的其他的状态,所述起飞诊断状态至少包括无人机判定状态和外部环境判定状态,所述无人机判定状态是所述无人机判定部判定所述无人机本身的构成的状态,所述外部环境判定状态是所述外部环境判定部判定所述外部环境的状态,所述无人机系统的控制方法包括如下步骤:接收所述飞行开始命令的步骤、基于所述飞行开始命令转移到所述起飞诊断状态的步骤、以及在转移到所述起飞诊断状态后使所述无人机起飞的步骤。
本发明的其他的观点所涉及的无人机系统的控制程序是操纵器与无人机通过网络彼此连接并彼此协调动作的无人机系统的控制程序,所述无人机具备:飞行控制部;飞行开始指令接收部,其接收来自使用者的飞行开始命令;无人机判定部,其判定所述无人机本身所具有的构成是否在正常的范围进行动作;以及外部环境判定部,其判定所述无人机的外部环境是否适合所述无人机的飞行,所述无人机系统具有至少包括起飞诊断状态的彼此不同的多个状态,所述无人机系统通过满足按每个所述状态而确定的条件来转移到与所述条件对应的其他的状态,所述起飞诊断状态至少包括无人机判定状态和外部环境判定状态,所述无人机判定状态是所述无人机判定部判定所述无人机本身的构成的状态,所述外部环境判定状态是所述外部环境判定部判定所述外部环境的状态,所述无人机的控制程序使计算机执行如下命令:接收所述飞行开始命令的命令、基于所述飞行开始命令转移到所述起飞诊断状态的命令、以及在转移到所述起飞诊断状态后使所述无人机起飞的命令。
发明效果
提供一种即使在自主飞行时也能够维持高安全性的无人机(无人飞行器)。
附图说明
图1是示出构成本发明所涉及的无人机系统的无人机的实施方式的俯视图。
图2是上述无人机的主视图。
图3是上述无人机的右侧视图。
图4是上述无人机的后视图。
图5是上述无人机的立体图。
图6是上述无人机系统的整体概念图。
图7是表示上述无人机的控制功能的示意图。
图8是表示上述无人机具有的药剂播撒系统的构成的示意图。
图9是示出上述无人机系统的构成要素即上述无人机、操纵器、基站、以及务农支援云分别具有的、与状态转移有关的功能部的功能框图。
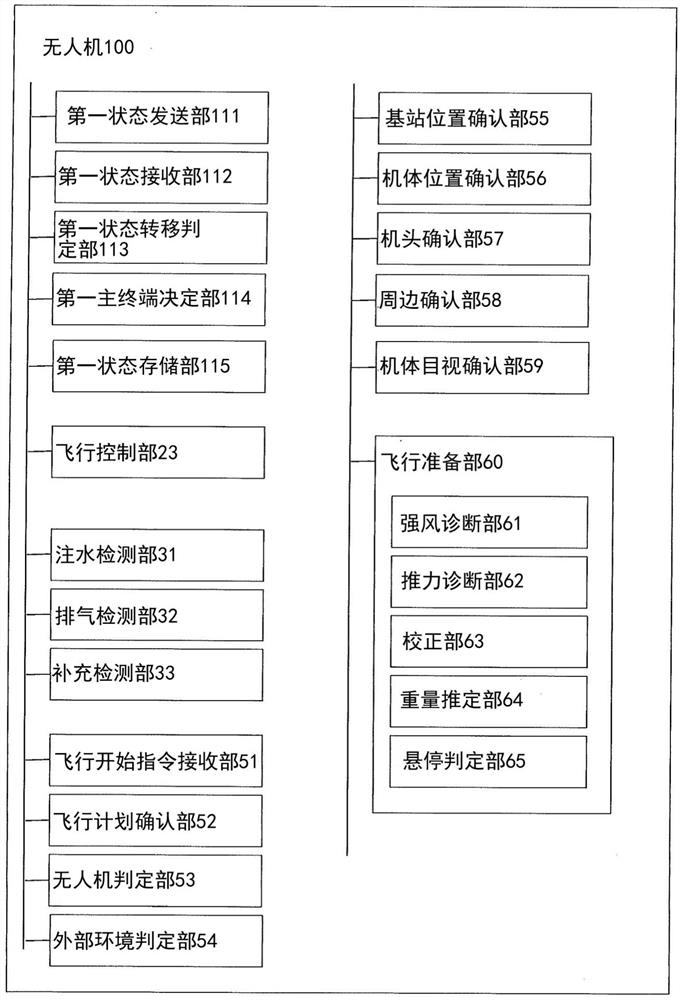
图10是上述无人机的详细的功能框图。
图11是示出上述无人机系统转移的多个状态的概略状态转移图。
图12是上述无人机系统转移的、与药剂补充有关的概略状态转移图。
图13是上述无人机系统转移的、与起飞诊断有关的概略状态转移图。
图14是上述无人机系统转移的、与上述无人机系统的关机有关的概略状态转移图。
具体实施方式
以下,参照附图,对用于实施本发明的方式进行说明。附图均为例示。在以下的详细的说明中,为了说明,对某个特定的细节进行叙述以提供对所公开的实施方式的完整的理解。然而,实施方式不限于这些特定的细节。另外,为了简化附图,概略地示出了公知的构造以及装置。
图6示出使用本发明所涉及的无人机100的药剂播撒用途的实施例的系统的整体概念图。本图为示意图,比例尺不准确。如图6以及图9所示,无人机系统500是无人机100、操纵器401、基站404以及务农支援云405通过网络(NW)彼此连接并彼此协调动作的系统。此外,无人机系统500可以是全部的构成要素彼此直接连接,也可以是各构成要素与至少一个构成要素直接连接并经由该直接连接的构成要素而与其他的构成要素间接连接的构成。
操纵器401是用于通过使用者402的操作将指令发送给无人机100并显示从无人机100接收到的信息(例如,位置、药剂量、电池剩余量、相机影像等)的单元,可以通过运行计算机程序的一般的平板终端等便携信息设备实现。本发明所涉及的无人机100优选被控制为进行自主飞行,但优选在起飞、返回等基本操作时以及紧急时能够进行手动操作。除了便携信息设备之外,也可以使用具有紧急停止专用的功能的紧急用操纵器(紧急用操纵器优选为具备大型的紧急停止按钮等的专用设备,以便在紧急时能够迅速地采取应对)。操纵器401和无人机100优选进行基于Wi-Fi等的无线通信。
农场403是作为无人机100的药剂播撒的对象的农田或田地等。实际上,农场403的地形复杂,事先无法获得地形图的情况或者地形图与现场的状况有差异的情况。通常,农场403与房屋、医院、学校、其他作物农场、道路、铁道等相邻。另外,有时在农场403内也存在建筑物、电线等障碍物。
基站404是提供Wi-Fi通信的母机功能等的装置,也作为RTK-GPS基站发挥功能,优选能够提供无人机100的准确的位置(也可以是Wi-Fi通信的母机功能与RTK-GPS基站相独立的装置)。务农支援云405是典型地在云服务上运营的计算机组和相关软件,优选与操纵器401通过移动电话线路等无线连接。务农支援云405可以进行用于分析无人机100拍摄到的农场403的图像,并掌握作物的生长状况,从而决定飞行路线的处理。另外,也可以将保存的农场403的地形信息等提供给无人机100。此外,也可以积累无人机100的飞行以及拍摄影像的历史记录,并进行各种分析处理。
通常,无人机100从位于农场403的外部的出发到达地点406起飞,并在农场403播撒药剂之后或者在需要补充药剂或充电等时返回到出发到达地点406。从出发到达地点406到目标的农场403的飞行路径(进入路径)可以由务农支援云405等事先保存,也可以由使用者402在起飞开始前输入。
图1示出无人机100的实施例的俯视图,图2示出其的(从行进方向侧观察)主视图,图3中示出其的右侧视图,图4示出后视图,图5示出立体图。此外,在本说明书中,无人机是指与动力单元(电力、原动机等)、操纵方式(是无线还是有线、以及是自主飞行型还是手动操纵型等)无关而具有多个旋转翼或飞行单元的所有飞行器。
旋转翼101-1a、101-1b、101-2a、101-2b、101-3a、101-3b、101-4a、101-4b(也被称为转子)是用于使无人机100飞行的单元,考虑到飞行的稳定性、机体尺寸以及电池消耗量的平衡,优选具备8台(2级构成的旋转翼为4套)。
电动机102-1a、102-1b、102-2a、102-2b、102-3a、102-3b、102-4a、102-4b是使旋转翼101-1a、101-1b、101-2a、101-2b、101-3a、101-3b、101-4a、101-4b旋转的单元(典型地是电动机,但也可以是发动机等),优选相对于一个旋转翼设置有1台。为了无人机的飞行的稳定性等,优选1套内的上下的旋转翼(例如,101-1a和101-1b)以及与它们对应的电动机(例如,102-1a和102-1b)的轴位于同一直线上且彼此向相反方向旋转。此外,一部分的旋转翼101-3b以及电动机102-3b虽然未图示,但其位置是不言自明的,如果有左侧视图,则处于示出的位置。如图2及图3所示,用于对为了使转子不与异物干扰而设置的螺旋桨防护件进行支承的放射状的构件优选不是水平而是塔架上的构造。这是为了在碰撞时促使该构件向旋转翼的外侧压曲,防止与转子干扰。
药剂喷嘴103-1、103-2、103-3、103-4是用于将药剂朝向下方播撒的单元,优选具备4台。此外,在本申请说明书中,所谓药剂,一般是指农药、除草剂、液肥、杀虫剂、种子以及水等在农场播撒的液体或粉体。
药剂罐104是用于保管待播撒的药剂的罐,从重量平衡的观点出发,优选设置在靠近无人机100的重心的位置且比重心低的位置。药剂软管105-1、105-2、105-3、105-4是将药剂罐104与各药剂喷嘴103-1、103-2、103-3、103-4连接的单元,由硬质的原材料构成,也可以兼具支承该药剂喷嘴的作用。泵106是用于将药剂从喷嘴喷出的单元。
无人机100将药剂罐104中保管的药剂朝向农场从空中向下方播撒。根据进行空中播撒的无人机100,与由地面播撒机、使用者自身从地面播撒的情况相比,能够对农场致密地播撒药剂。因此,不会如从地面播撒的情况那样重复播撒在农场内的区域,而能够均匀地播撒。因此,药剂罐104中保管的药剂与从地面播撒的药剂相比是高浓度例如10倍左右的药剂。
图7示出表示本发明所涉及的药剂播撒用无人机的实施例的控制功能的示意图。飞行控制器501是负责无人机整体的控制的构成要素,具体而言,可以是包括CPU、存储器、相关软件等的嵌入式计算机。飞行控制器501基于从操纵器401接收到的输入信息以及从后述的各种传感器得到的输入信息,通过ESC(Electronic Speed Control,电子速度控制)等控制单元,控制电动机102-1a、102-1b、102-2a、102-2b、102-3a、102-3b、104-a、104-b的转速,由此控制无人机100的飞行。优选为电动机102-1a、102-1b、102-2a、102-2b、102-3a、102-3b、104-a、104-b的实际的转速被反馈至飞行控制器501并能够监视是否进行了正常的旋转的构成。或者,也可以是在旋转翼101设置光学传感器等而旋转翼101的旋转被反馈至飞行控制器501的构成。
飞行控制器501使用的软件优选为为了功能扩展/变更、问题修正等而能够通过存储介质等或通过Wi-Fi通信、USB等通信单元进行改写。在此情况下,为了不进行基于不正当的软件的改写,优选进行基于加密、校验和、电子签名、病毒检测软件等的保护。另外,飞行控制器501在控制中使用的计算处理的一部分可以通过存在于操纵器401上或者务农支援云405上、其他场所的其他的计算机执行。飞行控制器501的重要性较高,因此其构成要素的一部分或者全部可以双重化。
电池502是向飞行控制器501以及无人机的其他构成要素供给电力的单元,优选为充电式。优选电池502经由包括保险丝或断路器等的电源组件与飞行控制器501连接。电池502优选为除了电力供给功能之外,还具有将其内部状态(蓄电量、累计使用时间等)向飞行控制器501传递的功能的智能电池。
飞行控制器501能够经由Wi-Fi子机功能503,进而经由基站404与操纵器401进行信息更换,从操纵器401接收必要的指令,并且将必要的信息向操纵器401发送。在此情况下,优选对通信实施加密,能够防止窃听、冒充、设备的盗用等不正当行为。优选基站404除了基于Wi-Fi的通信功能之外,还具备RTK-GPS基站的功能。通过将RTK基站的信号与来自GPS定位卫星的信号进行组合,由此通过GPS模块504,能够以数厘米程度的精度对无人机100的绝对位置进行测定。GPS模块504的重要性高,因此优选进行双重化/多重化,另外,为了应对特定的GPS卫星的故障,优选控制经冗余化的各个GPS模块504以使用其他的卫星。
6轴陀螺传感器505是测定无人机机体的彼此正交的3个方向的加速度的单元(进而,是通过加速度的积分来计算速度的单元)。另外,6轴陀螺传感器505是测定上述3个方向上的无人机机体的姿势角的变化即角速度的单元。地磁传感器506是通过地磁的测定来测定无人机机体的方向的单元。气压传感器507是测定气压的单元,也能够间接地测定无人机的高度。激光传感器508是利用激光的反射来测定无人机机体与地表的距离的单元,优选使用IR(红外线)激光。声纳509是利用超声波等的声波的反射来测定无人机机体与地表的距离的单元。也可以追加用于测定机体的倾斜度的陀螺传感器(角速度传感器)、用于测定风力的风力传感器等。另外,这些传感器类优选进行双重化或者多重化。在存在同一目的的多个传感器的情况下,飞行控制器501可以仅使用其中的一个,并在其发生了故障时,切换为替代的传感器来使用。或者,也可以同时使用多个传感器,在各自的测定结果不一致的情况下,视为发生了故障。
流量传感器510是用于测定药剂的流量的单元,优选设置于从药剂罐104到药剂喷嘴103的路径的多个场所。液体不足传感器511是检测药剂的量为给定的量以下的情况的传感器。多光谱相机512是拍摄农场403并取得用于图像分析的数据的单元。障碍物检测相机513是用于检测无人机障碍物的相机,由于图像特性和镜头的朝向与多光谱相机512不同,因此优选是与多光谱相机512不同的设备。开关514是用于供无人机100的使用者402进行各种设定的单元。障碍物接触传感器515是用于检测无人机100、特别是其转子、螺旋桨防护件部分与电线、建筑物、人体、树木、鸟或者其他的无人机等障碍物接触的传感器。盖传感器516是检测无人机100的操作面板、内部维护用的盖为打开状态的传感器。药剂注入口传感器517是检测药剂罐104的注入口为打开状态的传感器。这些传感器类可以根据无人机的成本目标、性能要件进行取舍选择,也可以进行双重化/多重化。另外,也可以在无人机100外部的基站404、操纵器401、或者其他场所设置传感器,将读取的信息向无人机发送。例如,也可以在基站404设置风力传感器,将与风力/风向相关的信息经由Wi-Fi通信向无人机100发送。
飞行控制器501对泵106发送控制信号,并进行药剂喷出量的调整、药剂喷出的停止。优选为泵106的当前时间点的状况(例如,转速等)被反馈至飞行控制器501的构成。
LED107是用于向无人机的操作者通知无人机的状态的显示单元。也可以代替LED或者在此基础上使用液晶显示器等显示单元。蜂鸣器518是用于通过声音信号通知无人机的状态(特别是错误状态)的输出单元。Wi-Fi子机功能519与操纵器401不同,例如是为了软件的传送等而与外部的计算机等进行通信的可选的构成要素。也可以代替Wi-Fi子机功能或者在此基础上,使用红外线通信、Bluetooth(注册商标)、ZigBee(注册商标)、NFC等其他的无线通信单元或者USB连接等的有线通信单元。扬声器520是通过已录音的人声、合成声音等通知无人机的状态(特别是错误状态)的输出单元。根据天气状态,有时难以看到飞行中的无人机100的视觉上的显示,因此在这样的情况下,基于声音的状况传递是有效的。警告灯521是通知无人机的状态(特别是错误状态)的闪光灯等的显示单元。这些输入输出单元可以根据无人机的成本目标、性能要件进行取舍选择,也可以进行双重化/多重化。
如图8所示,无人机100所具备的药剂的喷出控制系统设置在播撒药剂的农业用机械中,特别是在本实施例中设置在药剂播撒用无人机100中,并高精度地控制药剂的喷出,并且检测药剂的喷出异常。
此外,在本实施方式中,在药剂的“喷出异常”这样的情况中,除了实际上导致药剂的喷出异常并且喷出超过规定值的药剂的状态之外,还包括可能导致这种药剂的喷出异常的准备状态、实际上播撒或者可能播撒与预定不同的药剂的设定异常的状态。
如上所述,药剂罐104是用于保管待播撒的药剂的罐。
在该药剂罐104,安装有用于填充药剂或取出所保管的药剂的能够开闭的盖。在该能够开闭的盖,安装有能够检测开闭状态的开闭传感器104a。该开闭传感器104a例如能够由安装于盖的磁铁、和安装于主体并感测该磁铁的磁力、接触的感测器构成。由此,能够判别盖的开闭状态,使使用者能够识别盖的开闭状态,能够防止在盖保持打开不变的状态下进行药剂的播撒的事态。
另外,在药剂罐104,设置有药剂种类判别传感器104b。药剂种类判别传感器104b能够判别药剂罐104内存留的药剂的种类。
该药剂种类判别传感器104b例如由能够测定药剂罐104内的药剂的粘度、导电率或者pH的装置构成,将所测定的各项目的值与每个药剂的作为基准的值进行对比,能够判别药剂的种类。
此外,不限于此,例如,如果将盒式的药剂罐用作药剂罐104,则也能够通过事先将记录药剂种类的数据的IC等附于该盒式的药剂罐,并设置用于从该IC等获取药剂种类的数据的单元,由此来判别药剂的种类。
在此,由于存在使用多种药剂的情况,因此判别预定播撒的药剂是否保管在药剂罐104内是有用的。特别是,药剂的粒径根据种类而不同,在误播撒了粒径比预定播撒的药剂小的药剂的情况下,引起漂移(药剂向目标物以外的飞散、附着)的可能性高,不能被忽视。
另外,在药剂罐104中,安装有用于检测药剂的液体不足的液体不足传感器511。此外,药剂的液体不足除了药剂用完的情况之外,还包括药剂的量为给定的量以下的情况,能够根据任意设定的量来检测药剂的液体不足。
此外,也可以在药剂罐104设置药剂罐104内的药剂的蒸散检测功能、温度/湿度的测定功能等,将药剂管理为适当的状态。
泵106将药剂罐104内保管的药剂向下游喷出,经由药剂软管105-1、105-2、105-3、105-4向各药剂喷嘴103-1、103-2、103-3、103-4送出。
此外,在将药剂从药剂罐104向药剂喷嘴103-1、103-2、103-3、103-4送出时,在本实施方式的说明中,有时将沿着该送出路径送出药剂的方向称为下游方向,将与此相反的方向称为上游方向。此外,尽管药剂的一部分从药剂罐104经由三通阀122再次向药剂罐104送出,但是对于该路径,将三通阀122侧称为下游方向,将药剂罐104侧称为上游方向。
扩展罐131是用于暂时存留从三通阀122送出的药剂并将其返回到药剂罐104的罐。
从三通阀122经由扩展罐131到药剂罐104的路径是用于去除(脱泡)注入到药剂罐104中的水或者药剂中的气泡的路径。通过使该路径循环,并且暂时存留于扩展罐131,从而能够进行水或者药剂的脱泡。
止回阀121-1、121-2、121-3、121-4、121-5、121-6、121-7是用于将药剂仅向恒定方向送出,防止向与该恒定方向相反的方向的流入即逆流的阀。该止回阀121-1、121-2、121-3、121-4、121-5、121-6、121-7起到在从药剂罐104到药剂喷嘴103-1、103-2、103-3、103-4的路径中阻断药剂的喷出的阻断机构的作用,并且如果能够起到阻断药剂的喷出的作用,则也能够使用电磁阀等其他的机构作为阻断机构。
在本例中,止回阀121-1设置在药剂罐104和泵106之间,且设置在设置于药剂罐104的药剂喷出口附近,止回阀121-2设置在三通阀122和药剂喷嘴103-1、103-2、103-3、103-4之间,止回阀121-4、121-5、121-6、121-7设置在药剂向外部的喷出口103a-1、103a-2、103a-3、103a-4,止回阀121-3设置在三通阀122和扩展罐131之间。止回阀121-1使从药剂罐104送出的药剂向下游方向送出,控制为不能向药剂罐104逆流。另外,止回阀121-2使从泵106送出的药剂向下游方向送出,控制为不能向泵106逆流。另外,止回阀121-3使从三通阀122送出的药剂向扩展罐131所在的上游方向送出,控制为不能向三通阀122逆流。进而,止回阀121-4、121-5、121-6、121-7能够阻断药剂从喷出口103a-1、103a-2、103a-3、103a-4向外部喷出。
此外,止回阀121-1、121-2、121-3、121-4、121-5、121-6、121-7可以使用摆动式、升降式、晶片式等各种止回阀,并不特别限于特定的止回阀。另外,也可以不限于本例,而在适当的部位设置比本例多的止回阀。
三通阀122设置在泵106和药剂喷嘴103-1、103-2、103-3、103-4之间,构成从泵106连接到药剂喷嘴103-1、103-2、103-3、103-4的路径和从泵106经由扩展罐131连接到药剂罐104的路径的分支点,根据切换操作将药剂向各路径送出。三通阀122例如是三通电磁阀。
在此,从泵106连接到药剂喷嘴103-1、103-2、103-3、103-4的路径是用于将药剂从药剂喷嘴103-1、103-2、103-3、103-4喷出并播撒药剂的路径。
另外,如上所述,从泵106经由扩展罐131连接到药剂罐104的路径是用于去除(脱泡)药剂中的气泡的路径。
流量传感器510设置在泵106和药剂喷嘴103-1、103-2、103-3、103-4之间,测定向药剂喷嘴103-1、103-2、103-3、103-4送出的药剂的流量。基于由该流量传感器510测定的药剂的流量,能够掌握播撒在农场403的药剂的量。
压力传感器111-1、111-2设置于药剂的喷出口,测定从药剂喷嘴103-1、103-2、103-3、103-4向外部喷出的药剂的喷出压力。
压力传感器111-1、111-2设置于泵106的下游侧,测定向下游喷出的药剂的喷出压力。
通过由这些压力传感器111-1、111-2测定药剂的喷出压力,基于从各压力传感器的111-1、111-2得到的药剂的喷出压力以及/或者从各压力传感器111-1、111-2的测定值求得的压力损失的数值,能够高精度地掌握药剂的喷出状况,并判断药剂的过剩喷出等喷出异常或者控制药剂的喷出。
泵用传感器106a测定旋转件的转速,所述旋转件在泵106内从药剂罐104吸入药剂并且向下游喷出。
通过由该泵用传感器106a测定泵106的旋转件的转速,能够掌握从泵106送出的药剂的量,判断药剂的过剩喷出等喷出异常或者控制药剂的喷出。
喷嘴种类判别传感器114-1、114-2、114-3、114-4能够判别安装于药剂的喷出口的药剂喷嘴103-1、103-2、103-3、103-4的种类。
由于每个播撒的药剂的粒径的不同,药剂喷嘴103-1、103-2、103-3、103-4通常根据药剂而使用的药剂喷嘴不同。因此,通过判别药剂喷嘴103-1、103-2、103-3、103-4的种类是否适当,能够防止错误的药剂的播撒。
具体而言,例如,事先在喷出口设置与药剂喷嘴103-1、103-2、103-3、103-4嵌合或者卡合的机构,在药剂喷嘴103-1、103-2、103-3、103-4设置与该吐口侧的嵌合或者卡合机构嵌合或者卡合的机构,即针对多个药剂喷嘴103-1、103-2、103-3、103-4的每一个而不同的形状的机构。而且,当在喷出口安装药剂喷嘴103-1、103-2、103-3、103-4时,通过识别针对药剂喷嘴103-1、103-2、103-3、103-4的每一个而不同的形状,能够判别药剂喷嘴103-1、103-2、103-3、103-4的种类。
此外,在从药剂罐104到药剂喷嘴103-1、103-2、103-3、103-4的路径的途中,设置有用于将该路径中存留的药剂向外部排出的带旋塞的排出口(在图6中,记为“排放口”)。在药剂向农场403的播撒结束之后等,在使从药剂罐104到药剂喷嘴103-1、103-2、103-3、103-4的路径中积存的药剂排出的情况下,能够从该排出口排出药剂。
此外,在向药剂罐104补充药剂的过程中,特别是在后述的注水待机状态(S31)以及排气待机状态(S32)下,向药剂罐104注入水。即使在药剂罐104中进入了水的情况下,药剂喷出系统具有的、与药剂有关的各传感器,即液体不足传感器511、压力传感器511-1、511-2以及流量传感器510也同样地进行动作。另外,药剂种类判别传感器104b能够判别在药剂罐104中进入了水。
无人机100、操纵器401、基站404、以及务农支援云405彼此连接并合作地进行动作的无人机系统500优选即使在任一构成要素和其他构成要素的连接切断或者任一构成要素的电源断开的情况下,也能够保持无人机系统500的状态,顺利地继续作为无人机系统的运用。
另外,为了使无人机100安全地开始飞行,无人机100本身以及无人机100的外部环境等需要处于适合无人机100的飞行的状况。在无人机100本身以及外部环境等不适合无人机100的飞行的情况下,无人机系统500优选是不允许无人机100的飞行的系统。
无人机系统500具有彼此不同的多个状态。通过满足按每个状态而确定的条件,无人机系统500转移到与条件对应的其他的状态。所谓“无人机系统500的状态”,是表示用于转移到其他的状态的条件彼此不同的概念,可以按每个状态在软件的系统构成上彼此独立地构成,也可以多个状态在相同的系统构成中构成。在属于某个状态时,无人机系统500进行按每个该状态而确定的动作。在不满足按每个状态而确定的条件的情况下,无人机系统500保持在该状态。另外,也可以有多个确定的条件,有能够转移到多个状态的状态。
在无人机100、操纵器401、基站404、以及务农支援云405中的任何一个发生异常的情况下,可能威胁到无人机系统500整体的安全性。通过正确地判定无人机系统500的状态并根据该判定来规定动作,在不满足条件的情况下,不会使无人机100飞行或者播撒药剂。即,能够使无人机系统500安全地运行。特别是,能够使无人机100安全地飞行,并播撒药剂。
·用于进行无人机系统的状态转移的构成
如图9所示,无人机100具有第一状态发送部111、第一状态接收部112、第一状态转移判定部113、第一主终端决定部114以及第一状态存储部115。另外,操纵器401、基站404以及务农支援云405分别具有与第一状态发送部111、第一状态接收部112、第一状态转移判定部113、第一主终端决定部114以及第一状态存储部115对应的构成。即,操纵器401具有第二状态发送部411、第二状态接收部412、第二状态转移判定部413、第二主终端决定部414以及第二状态存储部415。基站404具有第三状态发送部441、第三状态接收部442、第三状态接收部443、第三主终端决定部444以及第三状态存储部445。务农支援云405具有第四状态发送部451、第四状态接收部452、第四状态转移判定部453、第四主终端决定部454以及第四状态存储部455。
第一至第四状态发送部111、411、441、451是将无人机系统500当前所属的状态的信息、和表示无人机100、操纵器401、以及基站404各自的终端的状况的终端信息发送给所连接的其他的构成要素的功能部。在此,其他的构成要素是无人机100、操纵器401、基站404、或者务农支援云405。所谓终端信息,例如是表示无人机100、操纵器401、基站404各自的电源的接通断开信息、各个电源容量等的数值。另外,所谓终端信息,也可以包括各构成要素间的连接状态、各构成要素的动作历史记录以及维护历史记录、各构成要素的故障信息、是否正在执行紧急停止的信息、进行了紧急停止的历史记录、以及注入药剂罐104的水或者药剂的类别、其量以及注入历史记录等。
第一至第四状态发送部111、411、441、451还可以将表示务农支援云405的状况的信息发送到其他的构成要素。所谓云信息,例如可以包括务农支援云405中存储的信息更新了的历史记录,即,最后更新日期和时间、进行了更新的终端的信息等。
第一至第四状态接收部112、412、442、452是从所连接的其他的构成要素具有的第一至第四状态发送部111、411、441、451接收无人机系统500当前所属的状态的信息、以及表示无人机100、操纵器401、以及基站404的状况的终端信息的功能部。另外,第一至第四状态接收部112、412、442、452还可以从其他的构成要素接收云信息。
即,基站404将无人机系统500当前所属的状态发送到无人机100以及操纵器401中的至少一个。另外,基站404从无人机100以及操纵器401中的至少一个接收无人机系统500当前所属的状态。基站404从无人机100以及操纵器401中的至少一个接收操纵器401以及基站404的连接状态、无人机100以及基站404的连接状态、和操纵器401以及无人机100的连接状态当中的至少一个连接状态。
另外,基站404可以与至少一个其他的构成要素之间收发各构成要素与务农支援云405的连接状态。
通过第一至第四状态发送部111、411、441、451以及第一至第四状态接收部112、412、442、452,各构成要素能够彼此掌握在无人机系统500中连接的其他的构成要素的终端信息以及云信息。即,即使在任一构成要素脱离合作的情况下,各构成要素也能够保持无人机系统500的状态,并顺利地继续作为无人机系统500的运用。
另外,根据操纵器401始终掌握终端信息以及云信息的构成,使用者402能够始终掌握无人机系统500的情况。
第一至第四状态转移判定部113、413、443、453是识别无人机系统500当前所属的状态并判定用于从当前所属的状态转移到其他的状态的条件是否满足的功能部。第一至第四状态转移判定部113、413、443、453能够进行与相同的条件有关的判断,各个状态转移判定部能够作为其他的状态转移判定部的代替进行动作。
第一至第四状态转移判定部113、413、443、453择一地进行用于转移到其他的状态的条件是否满足的判定。即,在一个状态转移判定部进行判定的情况下,其他的状态转移判定部不进行判定。在以下的说明中,也将具有进行状态转移的判定的状态转移判定部的构成要素称为“主终端”。根据该构成,在任一构成要素的电源断开的情况下,即使在任一构成要素间的连接切断,不能进行作为主终端的动作的情况下,其他的构成要素也能够作为主终端进行状态转移的判定,使无人机系统500的状态转移。
第一至第四主终端决定部114、414、444、454是基于由第一至第四状态接收部112、412、442、452接收的信息来决定将哪一个构成要素作为主终端的功能部。对于哪一个构成要素成为主终端,即由第一至第四状态转移判定部111、411、441、451中的哪一个判定状态转移,预先确定了优先级。具体而言,在各构成要素的电源通电,全部的构成要素合作的情况下,无人机100成为主终端。在无人机100的电源断开,或者和无人机100的各构成要素的连接切断,不能进行作为主终端的动作的情况下,通过第一至第四主终端决定部114、414、444、454的决定,操纵器401成为主终端。此外,优先级是一个例子,在无人机100不能作为主终端进行动作的情况下,基站404或者务农支援云405也可以成为主终端。另外,优先级可以固定,也可以变动。例如,优先级可以根据无人机系统500当前所属的状态而变动。
在本实施方式中,主终端决定部设置于各构成要素。根据该构成,即使在任一构成要素的连接切断,脱离合作的情况下,也能够决定主终端。此外,在全部的构成要素合作地进行动作的情况下,任一个主终端决定部能够进行主终端的决定即可,例如,只要设于无人机100的第一主终端决定部114能够进行无人机100成为主终端这一意思的决定即可。在无人机100脱离合作的情况下,第二主终端决定部414基于该意思的信息决定使操纵器401成为主终端。
第一至第四状态存储部115、415、445、455是存储表示无人机系统500当前所属的状态、以及无人机100、操纵器401、以及基站404的状况的终端信息的功能部。第一状态存储部115还可以存储表示务农支援云405的状况的云信息。
第一至第四状态存储部115、415、445、455的至少一部分由非易失性的存储区域例如非易失性存储器构成。根据该构成,即使各构成要素的电源断开,也能够预先存储信息。由于在电源的再通电时故障信息、维护的历史记录会持续,因此即使对于在电源断开之前发生的故障、异常也能够可靠地进行修理以及维护,能够安全地使用无人机系统500。
·用于管理药剂的注入的构成
如图10所示,无人机100具备注水检测部31、排气检测部32以及补充检测部33,作为用于管理向药剂罐104的药剂的注入的构成。
注水检测部31是检测药剂罐104中注水完成的功能部。
排气检测部32是检测使药剂罐104的内部的空气向药剂罐104的外部流出的排气动作完成的功能部。在三通阀122打开扩展罐131侧的路径的情况下,排气检测部32检测到在图6中的从药剂罐104到三通阀122的路径(以下,也称为“上游路径”)中排气完成。在三通阀122打开了药剂喷嘴103-1~4侧的路径的情况下,排气检测部32检测到在图6中的从三通阀122到药剂喷嘴103-1~4的路径(以下,也称为“下游路径”)中排气完成。
在上游路径中的排气的检测中,排气检测部32基于由泵用传感器106a检测的泵106的转速和压力传感器111-1以及流量传感器510中的至少一个的计测结果,检测排气动作完成。在下游路径中,具体而言,排气检测部32将排气动作完成情况下的、与泵106的转速对应的压力传感器111-1的值以及流量传感器510的值中的至少一个值作为基准值进行存储。排气检测部32将与泵106的转速对应的基准值、压力以及流量中的至少一个的实测值进行比较。在该差为给定值以内的情况下,排气检测部32检测到排气动作完成。
在下游路径中的排气的检测中,排气检测部32基于由泵用传感器106a检测的泵106的转速和压力传感器111-2以及流量传感器510中的至少一个的计测结果,检测排气动作完成。排气检测部32将排气动作完成的情况下的、与泵106的转速对应的压力传感器111-2的值、以及流量传感器510的值中的至少一个的值作为基准值进行存储,并与实测值进行比较而检测排气动作的完成。另外,压力传感器111-1的值也可以用于下游路径中的排气的检测。
此外,根据三通阀122打开的路径,与泵106的转速对应的压力传感器111-1、111-2的值以及流量传感器510的值分别不同。排气检测部32根据三通阀122打开哪一个路径的信息,来决定与实测值进行比较的基准值。
补充检测部33是检测药剂罐104中药剂的补充完成的功能部。补充检测部33例如能够通过判定装置来实现,该判定装置根据液面高度或者重量等检测在该药剂罐104内是否装入给定量的药剂。另外,补充检测部33也可以是使用计测药剂罐104内的药剂的量的液面计、重量计、或者水压传感器等以软件方式判定药剂成为给定量的功能部。
·用于起飞诊断的构成
如图10所示,无人机100具备飞行开始指令接收部51、飞行计划确认部52、无人机判定部53、外部环境判定部54、基站位置确认部55、机体位置确认部56、机头确认部57、周边确认部58以及机体目视确认部59,作为用于诊断在起飞前无人机100是否安全地飞行、用于进行药剂播撒的条件是否齐备的构成。
飞行开始指令接收部51是接收从使用者402输入的飞行开始指令的功能部。飞行开始指令是从操纵器401向无人机100发送的指令。由于飞行开始指令是用于将使用者402的意图传递给无人机100的指令,因此将使用者402的动作作为起点来发送给无人机100。
基站位置确认部55是确认与无人机100连接的基站404的位置是否在给定的范围内的功能部。
机体位置确认部56是确认无人机100是否设置在出发到达地点406的功能部。
机头确认部57是确认无人机100的机头的朝向是否朝向正常的方向的功能部。所谓“机头的朝向正常”,是指例如机头朝向播撒药液的农场所在的方向。
周边确认部58是确认在无人机100的周边在无人机100周边的给定范围内是否有人、物等障碍物的功能部。周边确认部58例如也可以是通过无人机100或者操纵器401等的报告以及显示来促使使用者402进行无人机100周边的障碍物的有无的确认的功能部。在确认无人机100的周边之后,如果没有障碍物,则使用者402输入该意思。此外,使用者402在发现了障碍物的情况下适当地去除。另外,使用者402进行的周边的确认结果的输入既可以能够输入到无人机100,也可以能够经由操纵器401输入。
另外,周边确认部58也可以是使用搭载于无人机100的适当的相机、传感器来探测无人机100的周边的障碍物并自动地判定在给定范围内没有物体的功能部。相机例如可以是能够360度拍摄无人机100的周边的360度相机,也可以由能够拍摄彼此不同的方向的多个相机构成。传感器例如是红外线传感器。
机体目视确认部59是促使使用者402目视确认无人机100并能够由使用者402输入确认结果的功能部。机体目视确认部59通过无人机100或者操纵器401等的报告以及显示促使使用者402进行无人机100周边的障碍物的有无的确认。在使用者402目视确认无人机100之后,在发现异常的情况下,输入该意思。另外,使用者402在发现异常的情况下,适当进行修理等。此外,使用者402进行的周边的确认结果的输入既可以能够输入到无人机100,也可以能够经由操纵器401输入。
机体目视确认部59也可以通过操纵器401向使用者402报告目视确认的点等。具体地,通过指示目视确认的点,使用者402能够有效地检查无人机100。
飞行计划确认部52是确认无人机100是否正常地保有与无人机100的飞行计划有关的信息的功能部。飞行计划例如包括在飞行中播撒药液的农场的位置、在该农场内飞行的路线。飞行计划是预先登录在无人机100的飞行计划存储部中的信息,能够适当改写。另外,基于指定的农场的位置自动地计算飞行计划中包括的飞行路线。此外,飞行路线既可以是基于农场的位置唯一地计算的飞行路线,也可以考虑其他的条件而按每个飞行计划的制定而计算的、不同的飞行路线。
无人机判定部53是判定无人机100本身具有的各构成在正常的范围内进行动作的功能部。所谓无人机100本身具有的各构成,例如是电池502、电动机102、各种传感器等。
外部环境判定部54是主要判定无人机100的外部环境是否是适合无人机100的飞行的环境的功能部。所谓外部环境,例如包括:有无成为连接各构成要素间的电波的妨碍的那样的外部干扰、GPS的接收灵敏度、气温、无人机100的周围的风速、天气、以及地磁的状况等。在无人机100周围的风速为给定以上的情况下,无人机100被风吹到,或者播撒的药剂飞散,因此难以进行适当的飞行。另外,在有雨、雪等降水的情况下,或者予测在给定时间以内发生降水现象的可能性高的情况下,由于降水而导致药剂流动,难以固定在农场中,因此优选不进行播撒。即,也可以在有降水或者在给定时间内的降水的可能性高时也禁止起飞。进而,由于即使在地磁紊乱的情况下也会成为连接各构成要素间的电波的妨碍,因此也可以禁止起飞。进而,另外,可以测定建立了GPS的通信的卫星的数量,在给定数量以下的情况下禁止起飞。给定数量例如也可以是5个。这是因为,在建立了GPS的通信的卫星数量少的情况下,若在飞行中能够通信的卫星进一步减少,则有可能无法进行GPS的测定。外部环境判定部54向使用者402通知由于哪个理由未起飞而正在待机。
·用于在悬停中进行诊断的构成
无人机100还具有飞行准备部60,该飞行准备部60在无人机100悬停时判定无人机100是否处于适合飞行的状态。飞行准备部60特别是在无人机100刚刚起飞之后进行的悬停期间进行诊断,但也可以在无人机100起飞并开始飞行之后适当进行的悬停中进行诊断。
飞行准备部60具备强风诊断部61、推力诊断部62、校正部63、重量推定部64以及悬停判定部65。
悬停判定部65是判定无人机100是否悬停,即进行悬停判定的功能部。所谓悬停,是指如下状态,即,在定义了在水平面上彼此正交的X以及Y坐标、和与XY平面正交的铅垂的Z坐标的情况下,无人机100的XYZ坐标没有变化、或者在窄的给定范围内摆动的状态。另外,悬停是在XYZ方向的任一方向上都不具有移动速度的状态。
悬停判定部65例如检测RTK-GPS的定位基座量在全部的XYZ方向上没有变化。另外,悬停判定部65对6轴陀螺传感器505的XYZ方向上的测定值分别进行二阶积分来计算位置,检测在XYZ方向上的位置在给定时间没有变化。进而,悬停判定部65通过对6轴陀螺传感器505的XYZ方向上的测定值分别进行积分来计算速度,并检测无人机100不具有XYZ方向上的速度。悬停判定部65通过组合上述任意一个或多个获取值来判定无人机100正在悬停。
强风诊断部61是测定吹向无人机100的风,并诊断无人机100的飞行是否能够进行的功能部。对于强风诊断部61进行的风的测定,例如可以通过利用接触检测器测定由风产生的应力来计算风速,也可以利用风杯型、风车型等风速计来计算。
在无人机100悬停的状态下,强风诊断部61通过6轴陀螺传感器505计算无人机100的姿势角。在向无人机100吹风的情况下,根据风的强度而成为向风下侧前倾的姿势角。因此,在无人机100的姿势角为给定角度以上的情况下,强风诊断部61判定为向无人机100吹给定以上的强度的风。
另外,强风诊断部61也可以计算电动机102-1a、102-1b、102-2a、102-2b、102-3a、102-3b、102-4a、102-4b或者旋转翼101-1a、101-1b、101-2a、101-2b、101-3a、101-3b、101-4a、101-4b各自的转速。在向无人机100吹风的情况下,由于对无人机100作用有欲向风下侧倾斜的力,因此8个旋转翼101中的、配置在风下侧的两个部位的旋转翼的推力增加,即转速增加,配置在上风侧的两个部位的旋转翼的推力降低,即转速降低。因此,在电动机102或者旋转翼101的转速的配置位置的差异为给定以上的情况下,强风诊断部61判定为向无人机100吹给定以上的强度的风。强风诊断部61通过基于上述姿势角的判定以及基于转速的差异的判定中的任一个或者组合双方的判定结果,来检测强风。
强风诊断部61可以通过通信从基站404、在周边飞行的无人机100接收与风有关的信息,并判断该无人机100的飞行是否能够进行。
在吹向无人机100的风为给定以上的强度时,强风诊断部61向无人机系统500通知该意思。主终端的状态转移判定部使无人机系统500的状态保持悬停状态原样待机。另外,主终端的状态转移判定部可以使无人机系统500的状态转移到后述的飞行开始待机状态(S4),并使无人机100着陆。
推力诊断部62是测定使飞行中的无人机100飞行的推力并诊断无人机100的推力是否正常发挥的功能部。在本实施方式中,推力通过旋转翼101获得。推力诊断部62例如是指配置在控制旋转翼101的旋转的电动机自身的内部的旋转测定功能。即,推力测定部244通过测定电动机的转速,从而获取由电动机控制的旋转翼101的转速。
另外,推力诊断部62可以测定旋转翼101自身的转速。例如,推力诊断部62可以是非接触式的旋转计。在该情况下,推力诊断部62通过向旋转翼101的至少一个部位置照射激光并计测来自激光的旋转翼101的反射光来对旋转翼101的转速进行计数。激光例如是红外线激光。
进而,推力诊断部62还可以测定供给到电动机的电流。
此外,推力诊断部62在无人机的推力通过旋转翼以外的构成实现的情况下,也可以是测定该推进器的运行状态的功能部。例如,在无人机通过喷射而推进的情况下,推力诊断部62也可以是测定喷射的压力的功能部。
推力诊断部62将测定的推力与飞行控制器501的命令值进行比较,在从来自飞行控制器501的命令开始一定时间后的差异在预先确定的阈值以内的情况下,判断为适当发挥着推力。在差异超过阈值的情况下,推力诊断部62向无人机系统500通知该意思。主终端的状态转移判定部使无人机系统500的状态转移到后述的飞行开始待机状态(S4),并使无人机100着陆。
校正部63进行用于测定无人机100的高度的传感器以及用于测定无人机100的速度的传感器中的至少一个的校正。所谓传感器的校正,包括对传感器的0点的偏移以及测定结果的数值高的情况下的增益的偏差进行补正的校正。特别是在无人机100悬停时进行校正部63的校正。
所谓用于测定无人机100的高度的传感器,例如包括激光传感器508、声纳509、6轴陀螺传感器505、或者GPS模块RTK504-1、504-2。即,校正部63能够关于高度校正来进行激光传感器508、声纳509、6轴陀螺传感器505、或者GPS模块RTK504-1、504-2的校正。
在进行校正的传感器是激光传感器508、声纳509的情况下,校正部63将接地于地面的状态下的RTK-GPS的高度方向的定位坐标即Z坐标与判定为正在悬停时的RTK-GPS的高度方向的Z坐标的差作为对地高度的真值,来校正激光传感器508以及声纳509。
在进行校正的传感器是6轴陀螺传感器505的情况下,校正部63将由判定为正在悬停时的激光传感器508以及声纳509得到的高度作为对地高度的真值,来校正6轴陀螺传感器505。
在进行校正的传感器是GPS模块RTK504-1、504-2的情况下,校正部63将由判定为正在悬停时的激光传感器508以及声纳509得到的高度作为对地高度的真值,来校正GPS模块RTK504-1、504-2的RTK-GPS的Z方向的定位坐标。
所谓用于测定无人机的速度的传感器,例如包括GPS模块多普勒504-3或者6轴陀螺传感器505。校正部63使用GPS模块多普勒504-3来测定无人机100的移动速度。由于无人机100在起飞后的悬停状态下不移动,移动速度在XYZ方向上为0,因此校正部63校正GPS模块多普勒504-3的测定结果,使得在判定为正在悬停时的XYZ方向的移动速度为0。另外,校正部63使用加速度传感器的计测值的一阶积分值来测定无人机100的移动速度。在该情况下,校正部63校正加速度传感器的XY方向的测定值,使得在判定为正在悬停时的XYZ方向的移动速度为0。
重量推定部64是推定无人机100的重量的功能部。重量推定部64能够在悬停中基于由推力诊断部62计测的推力的值来推定无人机100的重量。
·无人机系统的状态转移
如图11所示,本实施方式中的无人机系统500能够取得停止状态(S0)、初始检查状态(S1)、药剂准备待机状态(S2)、药剂准备状态(S3)、飞行开始待机状态(S4)、起飞诊断状态(S5)、飞行播撒状态(S6)、着陆后待机状态(S7)、维护状态(S8)、以及关机状态(S9)。
停止状态(S0)是无人机100、操纵器401以及基站404的电源断开的状态。在停止状态(S0)下,若各构成要素的电源接通,则无人机系统500转移到初始检查状态(S1)。各构成要素的电源可以分别由使用者402能够手动接通,也可以通过使用者402操作某一个构成要素而接通其他的构成要素的电源。例如,也可以构成为,通过使用者402接通操纵器401的电源来起动专用的应用程序,来使无人机100以及基站404的电源接通。
初始检查状态(S1)是在各构成要素的起动后确认各构成要素的动作是否正常进行的状态。在初始检查状态下,例如进行各构成要素是否电源通电了的确认、各构成要素间的通信是否正常进行的确认。若确认为给定的确认事项全部正常,则无人机系统500转移到药剂准备待机状态(S2)。
药剂准备待机状态(S2)是等待输入来自使用者402的、使向无人机100的药剂罐104注入药剂的作业开始这一意思的指令即药剂注入开始指令的状态。若接收到由使用者402输入的药剂注入开始指令,则无人机系统500转移到药剂准备状态(S3)。
药剂准备状态(S3)是在由使用者402进行向药剂罐104注入药剂的作业期间,无人机系统500所属的状态。
如图12所示,药剂准备状态(S3)包括注水待机状态(S31)、排气待机状态(S32)、以及药剂待机状态(S33)。
注水待机状态(S31)是能够向药剂罐104注入水的状态。注水待机状态(S31)是基于来自使用者的药剂注入开始指令从药剂准备待机状态(S2)转移的状态。在注水待机状态(S31)下,无人机系统500通过操纵器401通知使用者402需要向药剂罐104注入水这一意思。另外,无人机100可以通过补充检测部33判定是否向药剂罐104中注入了足够量的水。在该情况下,无人机系统500通过操纵器401通知使用者向药剂罐104注入了足够量的水。
进而,无人机系统500通过操纵器401通知使用者402,使得在注入完成之后关闭药剂罐104的盖或者进一步锁定盖的锁。此外,盖的开闭和锁的上锁以及解锁可以分别通过设于无人机100的机构自动地进行。
在注水待机状态(S31)下,若注水检测部31检测到向药剂罐104注入了水,则无人机系统500转移到排气待机状态(S32)。无人机系统500可以参照开闭传感器104a的判别结果,以药剂罐104具有的盖关闭或进一步通过适当的锁定机构锁定为条件,转移到排气待机状态(S32)。
排气待机状态(S32)是驱动泵106以进行排气,并等待从药剂罐104内以及药剂罐104到药剂喷嘴103-1~4的路径放气的状态。排气待机状态(S32)还具有上游排气待机状态(S32-1)以及下游排气待机状态(S32-2)。
在上游排气待机状态(S32-1)下,三通阀122向扩展罐131侧打开。通过泵106的驱动,药剂罐104内以及上游路径中存在的空气在该路径中循环,并且被暂时存留在扩展罐131中,以被去除。若排气检测部32检测到上游路径中的排气动作的完成,则无人机系统500转移到下游排气待机状态(S32-2)。
在下游排气待机状态(S32-2)下,三通阀122向药剂喷嘴103-1~4侧打开。主要存在于下游路径中的空气被通过泵106的驱动而移动的水推动,并从喷嘴103向药剂罐104的外部释放。即,进行下游路径中的药剂罐104的排气。若排气检测部32检测到排气动作的完成,则无人机系统500转移到药剂待机状态(S33)。
关于上游排气待机状态(S32-1)以及下游排气待机状态(S32-2),状态全自动地转移,可以没有基于使用者402的行为的条件,但也可以从操纵器401报告从上游排气待机状态(S32-1)转移到下游排气待机状态(S32-2)这一意思,状态基于使用者402的确认输入而转移。另外,也可以构成为,在状态全自动地转移的情况下,通过操纵器401通知使用者402无人机系统500处于何种状态。
药剂待机状态(S33)是注水口的盖的锁被解除,且能够从注水口注入药剂的状态。在药剂待机状态(S33)下,无人机系统500通过操纵器401通知使用者402需要向药剂罐104注入药剂这一意思。无人机系统500通过补充检测部33判别向药剂罐104注入了足够量的药剂,通过操纵器401通知使用者402该意思。
进而,无人机系统500可以通过操纵器401通知使用者,使得在注入完成之后关闭药剂罐104的盖或者进一步锁定盖的锁。
若补充检测部33检测到在药剂罐104中药剂的补充完成,则无人机系统500转移到飞行开始待机状态(S4)。
如上所述,由于进行空中播撒的无人机100能够对农场致密地播撒药剂,因此与由地面播撒机、使用者自身从地面播撒的一般的药剂相比,搭载高浓度的药剂。即,与一般的药剂相比,价格昂贵,而且有可能对人体、农场有害。因此,若通过排气动作排出药剂,则在费用方面以及安全方面不优选。根据在通过水进行排气动作的基础上补充药剂的本构成,由于在药剂准备状态(S3)下能够抑制从喷嘴103排出的药剂的量,因此对无人机100的应用特别有用。
飞行开始待机状态(S4)是能够输入来自使用者402的飞行开始指令的状态。飞行开始指令是促使使用者402进行无人机100的起飞的指令。如图11所示,若飞行开始指令接收部51接收到飞行开始指令,则无人机系统500转移到在无人机100的起飞前进行必要的起飞诊断的起飞诊断状态(S5)。
起飞诊断状态(S5)是在无人机100开始飞行以及药剂播撒之前,无人机100安全地飞行,在诊断进行药剂播撒的条件是否齐备的期间,无人机系统500所属的状态。
如图13所示,起飞诊断状态(S5)包括无人机判定状态(S51)、飞行计划确认状态(S52)、外部环境判定状态(S53)、位置以及周边确认状态(S54)、以及悬停状态(S55)。无人机判定状态(S51)、飞行计划确认状态(S52)、外部环境判定状态(S53)、以及位置以及周边确认状态(S54)是无人机100着陆的状态,悬停状态(S55)是无人机100起飞后在出发到达地点406的上空悬停的状态。
无人机判定状态(S51)是通过无人机判定部53判定无人机100本身具有的各构成在正常的范围内进行动作的期间,无人机系统500所属的状态。另外,在无人机判定状态(S51)下,通过机体目视确认部59促使由使用者402进行无人机100的目视确认。若通过无人机判定部53判定各构成在正常的范围内进行动作,则无人机系统500转移到飞行计划确认状态(S52)。若通过无人机判定部53确认为异常,则在操纵器401上显示该意思,并在着陆后转移到待机状态(S7)。
飞行计划确认状态(S52)是在通过飞行计划确认部52确认无人机100是否正常保有与无人机100的飞行计划有关的信息的期间,无人机系统500所属的状态。若确认为与飞行计划有关的信息,则无人机系统500转移到外部环境判定状态(S53)。在没有正常保有与飞行计划有关的信息的情况下,无人机系统500进行获得与飞行计划有关的信息的动作。该动作例如可以从务农支援云405接收该信息。另外,在需要进行药剂播撒的农场的指定等使用者402所执行的决定的情况下,通过操纵器401向使用者402通知该意思,来促使进行决定。
外部环境判定状态(S53)是在通过外部环境判定部54主要判定无人机100的外部环境是否为适合无人机100的飞行的环境的期间,无人机系统500所属的状态。若通过外部环境判定部54判定为外部环境适合飞行,则无人机系统500转移到位置以及周边确认状态(S54)。
若通过外部环境判定部54判定为外部环境不适合无人机100的飞行,则无人机100在保持着陆不变的状态下待机。另外,在操纵器401上显示该意思。由于外部环境是短时间内的变动剧烈的因素,因此不是转移到其他的状态,而是优选等待外部环境成为适合飞行的状况。
位置以及周边确认状态(S54)是在通过基站位置确认部55、机体位置确认部56、机头确认部57、周边确认部58确认基站404以及无人机100的位置以及朝向和无人机100的周边环境的期间,无人机系统500所属的状态。
在位置以及周边确认状态(S54)下,若确认基站404以及无人机100的位置以及朝向和无人机100的周边环境,则无人机100起飞,无人机系统500转移到悬停状态(S55)。
悬停状态(S55)是通过飞行准备部60在无人机100进行用于伴随着水平移动的安全的飞行的诊断以及准备的期间,无人机系统500所属的状态。在悬停状态(S55)下,强风诊断部61诊断吹向无人机100的风是否为能够允许无人机100的飞行的程度。此外,强风的诊断可以通过外部环境判定部54进行。推力诊断部62判断旋转翼101发挥了所希望的推力。校正部63进行用于测定无人机100的高度的传感器以及用于测定无人机100的速度的传感器中的至少一个的校正。重量推定部64推定无人机100的重量。
此外,在悬停状态(S55)下进行的上述准备是在无人机100在空中的情况下测定所必需的或容易的工序。然而,可以构成为将这些准备在着陆中进行。例如,用于测定无人机100的高度的传感器的偏移、用于测定无人机100的速度的传感器的偏移在着陆中也能够校正。另外,在无人机判定状态(S51)、飞行计划确认状态(S52)、以及外部环境判定状态(S53)下进行的判定以及确认可以在悬停中而不是在着陆中进行。特别是,也可以在悬停中判定建立了GPS的通信的卫星的数量是否充足。另外,也可以在着陆中以及悬停中这两者中进行。
除了上述记载以外,在起飞诊断状态(S5)下,无人机系统500还可以促使使用者402的确认,并将输入使用者402已经确认了这一意思的信息作为状态转移的一个条件。
无人机系统500可以在起飞诊断状态(S5)下确认紧急用操纵器的电源容量。这是因为,在紧急用操纵器的电源容量为给定以下的情况下,在飞行播撒状态(S6)下无法发送紧急停止指令,有可能损害安全性。在紧急用操纵器的电源容量为给定以下的情况下,在操纵器401上显示该意思,促使使用者402采取更换紧急用操纵器的电池等措施。另外,关于操纵器401自身的电源容量也是同样的。
在本实施方式中,无人机系统500若接受到飞行开始命令,则转移到无人机判定状态(S51),若在无人机判定状态(S51)下判定为无人机100本身的状态为正常的范围,则转移到飞行计划确认状态(S52),若在飞行计划确认状态(S52)下确认为飞行计划确认部52中存储有飞行计划,则转移到外部环境判定状态(S53),若在外部环境判定状态(S53)下判断为外部环境适合无人机100的飞行,则转移到位置以及周边确认状态(S54),若在位置以及周边确认状态(S54)下确认为基站404以及无人机100的位置以及朝向、和无人机100的周边环境,则起飞并转移到悬停状态(S55),若在悬停状态(S55)下各诊断以及校正正常进行,则转移到飞行播撒状态(S6),并开始伴随着水平移动的飞行。无人机判定状态(S51)、飞行计划确认状态(S52)、外部环境判定状态(S53)、以及位置以及周边确认状态(S54)的顺序是不同的顺序。另外,也可以没有飞行计划确认状态(S52)。
无人机系统500若接收到飞行开始命令,则至少在转移到起飞诊断状态(S5)之后使无人机100起飞。通过在飞行开始指令之后且起飞之前具有起飞诊断状态(S5),能够可靠地检测在药剂注入等其他的作业中发生的异常,因此与在其他的定时进行诊断的构成以及不进行诊断的构成相比,能够确保高安全性。
无人机系统500在起飞并转移到悬停状态(S55)之后,开始伴随着无人机100的水平移动的飞行。在开始水平移动前的悬停中,也可以根据具有进行无人机100的诊断以及校正的工序的构成,能够进行更安全且准确的药剂播撒。
飞行播撒状态(S6)是在无人机100飞行并向农场进行药剂播撒期间,无人机系统500所属的状态。飞行播撒状态(S6)包括伴随着无人机100的水平移动的飞行。另外,在飞行播撒状态(S6)期间也可以悬停。在飞行播撒状态(S6)下的悬停中,可以进行如在悬停状态(S55)中描述的诊断以及校正。在该诊断中,若检测到向无人机100吹有强风,则无人机100进行后述的退避行动。另外,在电动机102以及旋转翼101的推力不在所希望的范围内的情况下,无人机100也进行退避行动。在飞行播撒状态(S6)下的悬停中,在通过校正检测到真值和测定值的偏差的情况下,校正各值而继续飞行。进而,另外,在飞行播撒状态(S6)下的悬停中推定重量。由于在飞行播撒状态(S6)下播撒药剂,因此无人机100的重量根据播撒而变化。因此,可以将飞行播撒状态(S6)下的悬停中推定的重量的值用于药剂罐104内的药剂量的推定。若无人机100着陆,则转移到着陆后待机状态(S7)。
在飞行播撒状态(S6)下,若通过操纵器401或者紧急用操纵器发送紧急停止指令,则无人机100采取退避行动。所谓退避行动,例如包括以最短的路线立即移动到给定的返回地点的“紧急返回”。所谓给定的返回地点,是预先存储在飞行控制部23(飞行控制器501)中的地点,例如是出发到达地点406。所谓出发到达地点406,例如是使用者402能够接近无人机100的陆地点,并且使用者402能够检查到达了出发到达地点406的无人机100,或者手动地将其运到其他的场所。
另外,退避行动包括着陆动作。所谓“着陆动作”,包括进行通常的着陆动作的“通常着陆”、以比通常的着陆更快地下降并着陆的“紧急着陆”、以及使全部的旋转翼停止并使无人机100从该位置向下方落下的“紧急停止”。此外,“紧急着陆”不仅包括在比通常的着陆更快地下降并与进行通常时同样的姿势控制并且进行通常的着陆的情况同样的地点着陆的动作,而且包括尽管姿势控制的精度低且姿势略微走形也使着陆成立的动作。作为一个具体例,通过缓慢且均衡地减少全部电动机的转速,能够不正下方而是高精度地下降并且着陆。
无人机100至少在飞行播撒状态(S6)下从操纵器401接收操纵器401的电源容量。无人机100在操纵器401的电源容量为给定以下的情况下采取退避行动。在操纵器401的电源容量降低的情况下,不能将与使用者402的飞行有关的指令传递到无人机100,无人机100的安全的飞行变得困难。因此,在操纵器401的电源容量降低的情况下,即使在无人机100的电池502的容量充分的情况下,也可以使无人机100采取退避行动。
另外,同样地,在紧急用操纵器的电源容量为给定以下的情况下,也可以使无人机100采取退避行动。
无人机系统500若接收到来自操纵器401或者紧急用操纵器的紧急停止命令,则转移到紧急停止状态(S11)。无人机系统500接受紧急停止命令并将转移到了紧急停止状态(S11)这一意思的接受信息发送到操纵器401。根据该构成,使用者402能够通过操纵器401的显示知道无人机系统500已经按照使用者402的意图转移到紧急停止状态(S11)。
着陆后待机状态(S7)是在着陆后进行切换作业的准备期间,无人机系统500所属的状态。着陆后待机状态(S7)是在无人机100着陆的状态下基于来自使用者402的动作指令能够转移到多个状态的状态。
在着陆后待机状态(S7)下,若从使用者402接收到切换进行药剂播撒的农场的动作指令,则无人机系统500经由指定农场切换路线(D)转移到飞行开始待机状态(S4)。
在着陆后待机状态(S7)下,若从使用者402接收到进行维护的动作指令,则无人机系统500转移到维护状态(S8)。
在着陆后待机状态(S7)下,若从使用者402接收到进行药剂补充的动作指令,则无人机系统500转移到药剂准备待机状态(S2)。
根据具有着陆后待机状态(S7)的无人机系统500,即使在针对某个农场结束了药剂播撒的无人机100继续进行向其他的农场的药剂播撒、药剂补充的情况下,也能够顺利地转移到接下来的动作。具体而言,在进行农场的切换以及药剂补充的情况下,能够不经由关机状态(S9)、停止状态(S0)、初始检查状态(S1)等其他的状态,而直接转移到飞行开始待机状态(S4)以及药剂准备待机状态(S2)。
维护状态(S8)是在无人机100进行无人机100本身的维护期间,无人机系统500所属的状态。所谓维护,例如包括自动清洁无人机100的外框体的动作。若维护状态(S8)下的维护结束,则无人机系统500转移到关机状态(S9)。
关机状态(S9)是在解除无人机100、操纵器401以及基站404的相互的连接,直到关断无人机100、操纵器401以及基站404的电源为止的期间,无人机系统500所属的状态。
如图14所示,关机状态(S9)包括无人机关机状态(S91)和其他终端关机状态(S92)。
无人机关机状态(S91)是在进行无人机100关机即电源断开所需的准备,直到无人机100关机为止的期间,无人机系统500所属的状态。在无人机关机状态(S91)下,无人机100将第一状态存储部115中存储的信息存放在非易失性的存储部中。另外,无人机100通过第一状态发送部111将第一状态存储部115中存储的信息发送到务农支援云405。
无人机100解除与操纵器401以及基站404的连接,并解除与各构成要素的合作。而且,使无人机100关机。
若无人机100关机,则无人机系统500转移到其他终端关机状态(S92)。在此,在无人机100为主终端的情况下,随着无人机100的关机,主终端转移到其他的构成要素,例如操纵器401。
对于主终端的转移,也可以在无人机100的关机前通过第一主终端决定部114将操纵器401决定为主终端。另外,第二主终端决定部414也可以检测到无人机100的电源断开,而将操纵器401决定为主终端。
其他终端关机状态(S92)是在直到操纵器401以及基站404关机为止的期间,无人机系统500所属的状态。操纵器401以及基站404可以通过第二以及第三状态发送部411、441将分别存储于第二以及第三状态存储部415、445的信息发送到务农支援云405。
若无人机100、操纵器401以及基站404全部关机,则无人机系统500停止。即,无人机系统500转移到停止状态(S0)。
在药剂准备状态(S3)或者起飞诊断状态(S5)下,若检测到无人机100的电池容量为给定以下,则无人机系统500经由电池不足路线(C)转移到着陆后待机状态(S7)。在着陆后待机状态(S7)下在电池容量为给定以下时,无人机系统500转移到关机状态(S9),电池502处于可更换状态。
在药剂准备状态(S3)或者着陆后待机状态(S7)下,若检测到药剂罐104内的药剂为给定以下,则无人机系统500经由药剂不足路线(B)转移到药剂准备待机状态(S2)。在药剂准备状态(S3),即无人机100着陆的状态下检测到药剂罐104的药剂为给定以下时,能够在起飞前转移到药剂准备待机状态(S2)。在药剂准备状态(S3)下在药剂罐104中充分装入药剂的情况下,在无人机100的飞行播撒状态(S6)下药剂枯竭的可能性高。因此,无人机100在从飞行播撒状态(S6)着陆并转移到着陆后待机状态(S7),在此基础上,转移到药剂准备待机状态(S2)。这样,无人机系统500能够检测药剂不足并从两个不同的状态转移到药剂准备待机状态(S2),因此即使在药剂不足的情况下也能够顺利地转移到下一状态,而不需要进行冗余的状态转移。
根据无人机、操纵器、基站、以及务农支援云彼此连接并合作地进行动作的本发明所涉及的无人机系统,即使在任一构成要素和其他的构成要素的连接切断,任一构成要素的电源断开的情况下,也能够保持无人机系统的状态,顺利地继续作为无人机系统的运用。
此外,在本说明中,以农业用药剂播撒无人机为例进行了说明,但本发明的技术思想不限于此,能够应用于所有的无人机。特别是,能够应用于进行自主飞行的无人机。
(本发明的技术上的显著的效果)
在本发明所涉及的无人机系统中,能够提供一种即使在自主飞行时也能够维持高安全性的无人机系统。
(附记)
以下,对上述本发明的实施方式中的其他的构成上的特征其效果进行附记。
无人机判定部53可以比较姿势和重力加速度矢量的方向,并判定是否落在给定值以内。姿势例如为侧倾角以及俯仰角。
外部环境判定部54也可以检查GNSS的信号的接收灵敏度是否充分。另外,外部环境判定部54也可以检查是否能够接收GNSS多普勒速度。进而,外部环境判定部54也可以检查RTK-GNSS是否为fix,换言之是否固定了RTK-GNSS。
外部环境判定部54可以检查GNSS罗盘是否为fix,换言之是否固定了GNSS罗盘。另外,外部环境判定部54可以检查数据是否从GNSS模块到达。
无人机判定部53可以确认协调动作的基站404和无人机100的距离是否在给定距离以内。
无人机判定部53也可以检查搭载于无人机100的传感器是否能够与飞行控制器501正常地通信。例如,无人机判定部53检查是否能够与加速度传感器、角速度传感器(加速度传感器以及角速度传感器包含于6轴陀螺传感器505)、气压传感器507、磁传感器506正常地通信。
无人机判定部53可以检查经多重化的各传感器的彼此之间的差异是否在给定差异以内。例如,关于加速度传感器的XYZ各方向,也可以计算主传感器以及子传感器各自的值的差,检查是否在给定值以内。另外,也可以检查气压传感器的主传感器以及子传感器的计测值的差是否在给定值以内。进而,关于角速度传感器的XYZ(侧倾/俯仰/偏航)各方向,也可以计算主传感器以及子传感器各自的值的差,检查是否在给定值以内。
无人机判定部53或者外部环境判定部54可以检查在着陆状态以及悬停状态中的至少一个状态下的加速度传感器的值。例如,检查主加速度传感器的X方向以及Y方向的值是否在给定值以内。在超过给定值的情况下,考虑传感器的异常、传感器的范围设定的异常或者无人机100置于倾斜的场所这些理由,正常的起飞可能更困难。另外,检查主加速度传感器的Z方向的值是否在给定范围以内。在超过给定范围的情况下,考虑传感器的异常、传感器的范围设定的异常或者无人机100极端倾斜这些理由,存在正常的起飞困难的情况。
无人机判定部53或者外部环境判定部54可以检查在着陆状态以及悬停状态中的至少一个状态下在角速度传感器的XYZ方向上角速度是否在给定值以内。在超过给定值的情况下,可能产生无人机100的旋转或者大的偏差。
无人机判定部53或者外部环境判定部54可以检查由气压传感器507计算的高度是否在给定范围内。在超过给定范围的情况下,可能导致气压传感器507的异常或者设置于无人机100不适合飞行的高海拔。
无人机判定部53或者外部环境判定部54可以检查地磁传感器矢量的大小是否在给定值以内。在超过给定值的情况下,可能导致磁传感器506的异常、磁传感器506的范围设定异常、或者置于无人机100不适合飞行的强磁环境。
无人机判定部53可以检查速度矢量的推测值是否在给定值以内。
无人机判定部53可以检查电池502是否适当搭载。无人机判定部53可以检查电池剩余量是否为给定值以上。
无人机判定部53可以在电池502被双重化的情况下,检查是否搭载有两个电池502且飞行控制器501能够与两个电池502进行通信。另外,可以检查两个电池502的余量差是否在给定值以内。进而,可以检查两个电池502的电压差是否在给定值以内。进而,另外,可以检查将两个电池502固定到主体的杆体是否被锁定。
无人机判定部53可以检查与药剂播撒有关的构成即播撒系统。例如,可以检查药剂罐104中是否填充有足够的药剂。另外,可以检查泵106、三通阀122以及药剂喷嘴103-1、103-2、103-3、103-4的播撒系统的构成是否能够与飞行控制器501进行通信。
无人机100具有对动作中的日志进行记录的存储器。无人机判定部53可以检查日志记录区域中是否有给定以上的空闲空间。
- 无人机系统、无人机、操纵器、无人机系统的控制方法及无人机系统控制程序
- 无人机系统、无人机、移动体、无人机系统的控制方法和无人机系统控制程序