一种节能输电线路巡线无人机
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及一种无人机,尤其涉及户外输电线路巡线用无人机。
背景技术
现在为了对户外的输电线路进行巡线,通常会使用无人机来代替工作人员进行巡线。很多高压输电线架设在崇山峻岭之中,单纯依靠工作人员去巡线,工作量十分巨大。无人机巡线的好处在于节省人力,且可以在工作人员的控制下飞越崇山峻岭,极大减轻工作人员的工作量。
但是使用无人机进行巡线存在一个问题,便是无人机的续航问题。无人机起飞后由于无人机内的电池电量是固定的,因此其工作半径固定,起飞后需要在一定路程后返程,对巡线工作带来一定困扰。如若可以增加无人机的工作半径,这样就会减少无人机的充电次数或者更换电池次数,减轻工作人员的工作量。
发明内容
为了解决上述技术问题,本发明公开了一种节能的输电线路巡线无人机,通过减少无人机的飞行能耗来增加无人机的巡航能力。
本发明的技术方案如下:
本发明公开了一种节能的输电线路巡线无人机,包括无人机本体,所述无人机本体内包括控制器,无人机本体上连接有无人机机翼,无人机本体前部设有摄像模块,所述无人机本体底部还设有轮架,所述轮架上设有滚轮,所述滚轮通过轮轴与轮架连接,控制器控制行走马达通过轮架带动轮轴转动,同时带动滚轮转动,所述滚轮绕滚轮外沿设有凹槽。
作为优选的,所述无人机本体底部设有脚架,所述脚架上设有电池仓。目的在于使整个无人机的重心偏下。
进一步的,所述电池仓内设有可更换的电池。可快速更换电池,方便工作人员携带无人机去下一巡线段进行巡线,无需等待充电过程。
作为优选的,所述无人机本体通过机翼连接杆与无人机机翼连接,所述机翼连接杆一端连接无人机本体,一端连接无人机机翼,所述机翼连接杆可绕无人机本体上下转动。其目的在于当无人机飞到输电线路上方时,降下机翼使整体的重心再下移,保持无人机在输电线路停留的平衡,增加无人机在输电线路上的稳定性。
本发明的好处在于:为了增加无人机的续航能力,当无人机飞到输电线路上方时,可以控制无人机降落在输电线上,通过安装在无人机下部的滚轮沿输电线行驶,此时无人机机翼处于怠速状态,减少能耗,增加续航,且无人机机翼在无人机在输电线上行驶时下降,使整个无人机的重心再降低,保证无人机在输电线上的平稳行驶。
附图说明
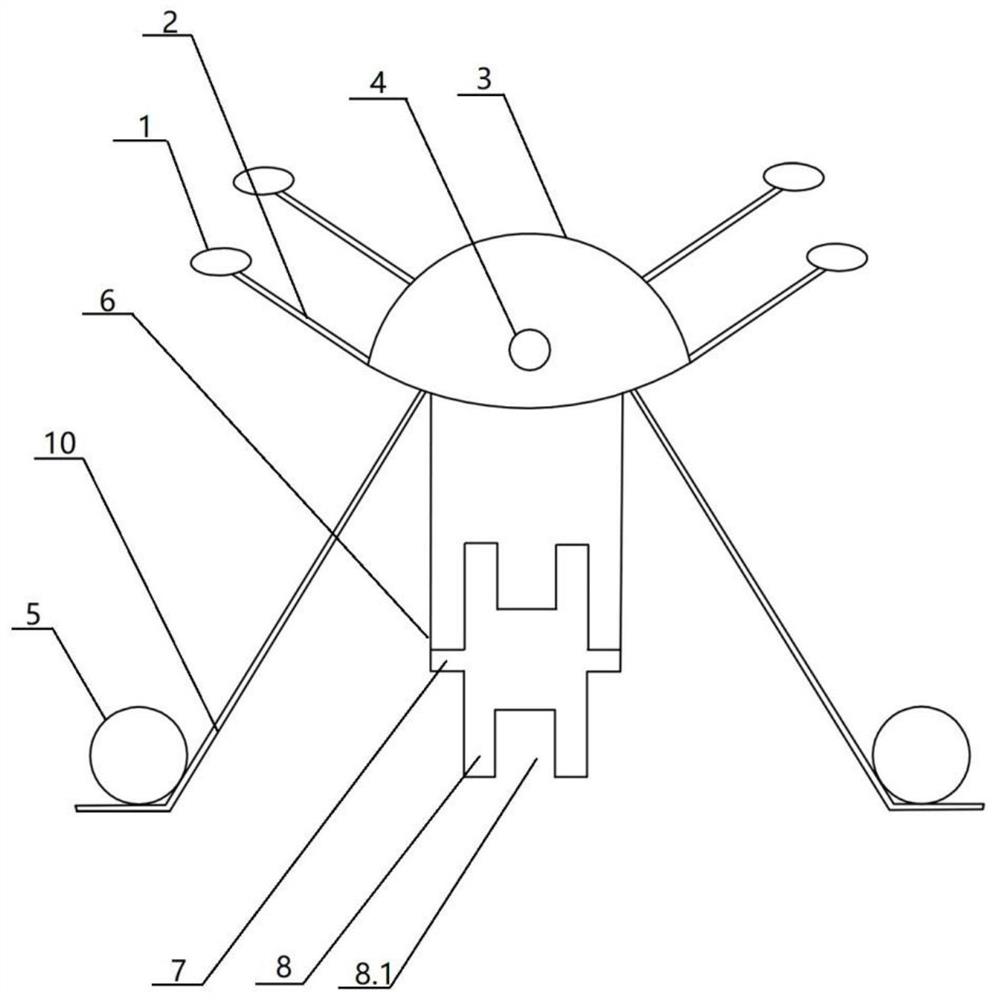
图1为无人机飞行时的整体结构示意图;
图2为无人机在输电线上行驶的结构示意图;
1、无人机机翼;2、机翼连接杆;3、无人机本体;4、摄像模块;5、电池仓;6、轮架;7、轮轴;8、滚轮;8.1、凹槽;9、输电线;10、脚架。
具体实施方式
以下结合说明书附图对本发明做进一步说明。
如图1所示,本发明公开了一种节能的输电线路巡线无人机,包括无人机本体3,所述无人机本体3内包括控制器,无人机本体3上连接有无人机机翼1,所述无人机机翼1通过机翼连接杆2与无人机本体3连接。无人机本体3前部设有摄像模块4,所述无人机本体3底部还设有轮架6,所述轮架6上设有滚轮8,所述滚轮8通过轮轴7与轮架6连接,控制器通过轮架6控制轮轴7转动,带动滚轮8转动,所述滚轮8绕滚轮8外沿设有凹槽8.1。所述无人机本体3底部设有脚架10,所述脚架10上设有电池仓5。目的在于使整个无人机的重心偏下。进一步的,所述电池仓5内设有可更换的电池。可快速更换电池,方便工作人员携带无人机去下一巡线段进行巡线,无需等待充电过程。
本发明所公开的节能输电线路巡线无人机的工作方式如下:
如图1所示,通过遥控器控制无人机起飞,机翼连接杆2绕无人机本体3转动,无人机机翼1上升,进入飞行状态,无人机机翼1全速转动,无人机飞起,飞至输电线9上方进行巡线,通过地面的工作人员观察结合摄像模块4采集的实时数据,控制无人机停在输电线9上。如图2所示,无人机停在输电线9上,输电线9位于凹槽8.1中。在本发明中,可以通过遥控器控制机翼连接杆2绕无人机本体3转动,无人机机翼1在机翼连接杆2向下转动时进入怠速状态。无人机机翼1下降,使整个无人机的重心下降,使无人机可以更平稳地在输电线9上行驶。无人机在输电线9上行驶时一旦地面的工作人员通过肉眼观察或者摄像模块4拍摄发现无人机前方出现瓷瓶或者铁塔等单凭滚轮8无法通过的结构,可以通过遥控器控制无人机再次起飞,越过瓷瓶或铁塔,再次停在前方的输电线9上,继续向前,因此整个巡线过程中,需要飞行的时候不多,极大增加了无人机的续航能力。
进入怠速状态的无人机的能耗远低于无人机飞行时所需要的电量,所以无人机在输电线9上行驶时其能耗减少,因此续航能力增加。
- 一种节能输电线路巡线无人机
- 一种分布控制的架空输电线路无人机巡线系统及其巡线方法