基于霍尔电推进自生扭矩的航天器角动量控制方法和系统
文献发布时间:2023-06-19 10:03:37
技术领域
本发明涉及一种航天器角动量控制方法,属于航天器推进领域。
背景技术
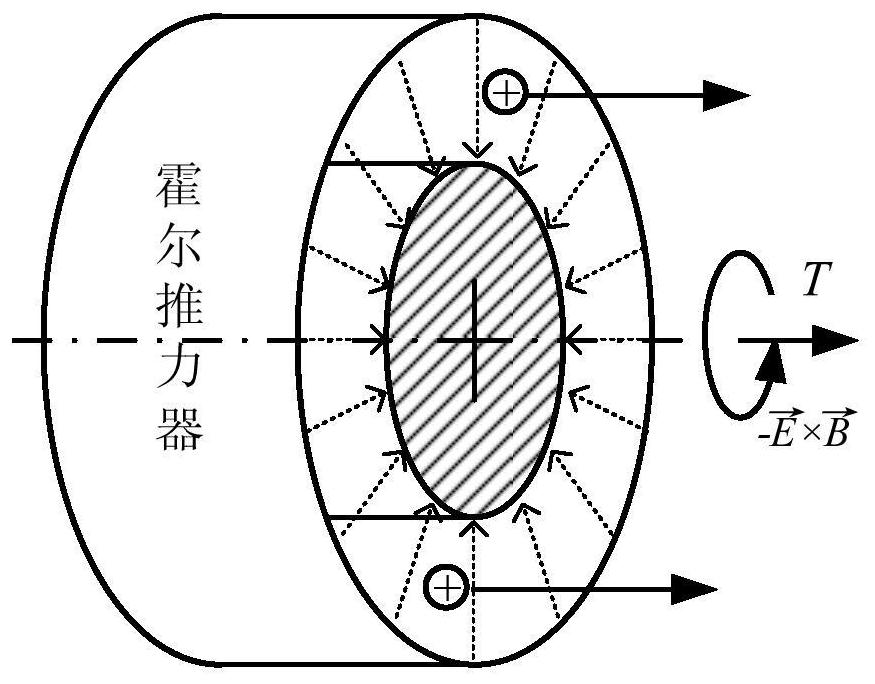
霍尔推力器作为霍尔电推进系统的核心单机,其工作推力特性决定了系统的推力输出特性,同时也影响系统在航天器上的应用策略。根据推进系统的工作原理,霍尔推力器工作时电离产生的离子在加速区空间正交电磁场的作用下,形成速度高达约20000m/s的等离子体射流,离子束流电流根据推力器的放电功率不同,通常会达到1~10A量级。该离子束电流与推力器径向磁场(量级约为0.02~0.04T)相互作用,会产生
以1kW功率级霍尔推力器为例,其工作时会在轴线方向上产生大小约为1×10
发明内容
本发明所要解决的技术问题是:为对采用霍尔电推进的航天器进行角动量管理,充分利用霍尔电推进系统的工作特性,优化系统的工作策略,本发明基于霍尔电推进系统的推力器自生扭矩现象,提出一种基于霍尔电推进自生扭矩的航天器角动量控制方法和系统,通过控制推进系统产生目标方向的扭矩,实现对航天器角动量的卸载、管理等功能。
本发明所采用的技术方案是:一种基于霍尔推力器自生扭矩的航天器角动量控制方法,包括步骤如下:
(1)根据航天器上霍尔推进系统推力器的配置和布局位置,获得各台推力器的推力指向角度γ、θ、
(2)确定每台推力器工作时产生的扭矩大小;
(3)根据励磁电流方向与扭矩方向的关系,确定推力器的励磁电流的正负方向;推力器扭矩的方向与推力的方向平行,定义扭矩方向与推力方向同向为正,反向为负。
(4)根据每台推力器的扭矩矢量方向,建立每台推力器励磁电流方向对航天器三轴产生扭矩分量的对应关系式;
(5)获得航天器的三轴角动量控制需求,确定目标方向的扭矩;由航天器姿轨控计算机计算得到角动量的控制需求;
(6)根据霍尔电推进系统的在轨工作的任务策略,通过调用使推力器工作时产生目标扭矩方向的励磁电流方向,对推力器在卫星三轴上产生的扭矩进行叠加或者抵消控制,进而产生目标方向的扭矩,实现航天器角动量的控制。
一种基于霍尔推力器自生扭矩的航天器角动量控制系统,包括:
第一模块,根据航天器上霍尔推进系统推力器的配置和布局位置,获得各台推力器的推力指向角度γ、θ、
第二模块,根据励磁电流方向与扭矩方向的关系,确定推力器的励磁电流的正负方向;根据每台推力器的扭矩矢量方向,建立每台推力器励磁电流方向对航天器三轴产生扭矩分量的对应关系式;获得航天器的三轴角动量控制需求,确定目标方向的扭矩;
第三模块,根据霍尔电推进系统的在轨工作的任务策略,通过调用使推力器工作时产生目标扭矩方向的励磁电流方向,对推力器在卫星三轴上产生的扭矩进行叠加或者抵消控制,产生目标方向的扭矩。
本发明与现有技术相比的有益效果是:
(1)本发明通过设计霍尔电推进系统工作励磁电流参数,实现对航天器三轴产生目标角动量,从而对其角动量进行主动管理、卸载的方法。
(2)本发明利用霍尔电推进系统工作特性,产生目标方向扭矩的方法,在轨应用中可实现对摄动、太阳光压等干扰力矩的抵消,降低干扰力矩对航天器姿控系统的干扰;
(3)本发明方法可使航天器在轨产生目标方向的扭矩,同时不会对航天器运行轨道产生影响,可应用于对角动量控制速度要求较慢的角动量管理任务。
(4)本发明方法简单可行,可操作性强,仅通过计算、调用不同组霍尔推力器的工作励磁电流方向参数组,即可产生目标方向的扭矩,减少航天器姿态控制所需的额外推进剂的消耗,具有一定的经济意义和推广价值。
附图说明
图1是霍尔推力器工作产生扭矩示意图。
图2是霍尔推力器扭矩方向与卫星XYZ轴的角度关系图。
图3是霍尔推力器励磁方向与扭矩方向关系的示意图。
图4是波音BSS-702SP卫星的电推力器布局示意图。
图5(a)是不同励磁电流策略对目标扭矩的控制效果图中均采用正向励磁电流产生Z方向的目标扭矩图;
图5(b)是不同励磁电流策略对目标扭矩的控制效果图中采用沿X轴对称的励磁电流产生X方向的目标扭矩图;
图5(c)是不同励磁电流策略对目标扭矩的控制效果图中采用沿Y轴对称的励磁电流产生Y方向的目标扭矩图。
具体实施方式
下面结合实施例对本发明作进一步阐述。
一种基于霍尔电推进自生扭矩的航天器角动量控制方法,包括步骤如下:
(1)首先根据航天器上霍尔推进系统推力器的配置和布局情况,获得各台推力器的推力指向角度。一般在卫星星本体坐标系下,定义γ、θ、
(2)确定每台推力器工作时产生的扭矩大小。一般由推力器生产商根据实际情况提供。
(3)建立励磁电流方向与扭矩方向的关系。推力器扭矩的方向与推力的方向平行,应用中一般定义扭矩方向与推力方向同向为正,反向为负,如图3所示。
(4)结合每台推力器的扭矩矢量方向,建立每台推力器励磁电流方向对航天器三轴产生扭矩分量的对应关系。
(5)获得航天器的三轴角动量卸载需求,一般由航天器姿轨控计算机计算得到角动量的管理需求,即需要产生目标方向的扭矩对卫星的三轴角动量进行卸载。
(6)结合霍尔电推进系统的在轨工作的任务策略,通过调用使推力器工作时产生目标扭矩方向的励磁电流方向,对推力器在卫星三轴上产生的扭矩进行叠加或者抵消控制,进而产生目标方向的扭矩,实现航天器角动量的控制。
一种基于霍尔推力器自生扭矩的航天器角动量控制系统,包括:
第一模块,根据航天器上霍尔推进系统推力器的配置和布局位置,获得各台推力器的推力指向角度γ、θ、
第二模块,根据励磁电流方向与扭矩方向的关系,确定推力器的励磁电流的正负方向;根据每台推力器的扭矩矢量方向,建立每台推力器励磁电流方向对航天器三轴产生扭矩分量的对应关系式;获得航天器的三轴角动量控制需求,确定目标方向的扭矩;
第三模块,根据霍尔电推进系统的在轨工作的任务策略,通过调用使推力器工作时产生目标扭矩方向的励磁电流方向,对推力器在卫星三轴上产生的扭矩进行叠加或者抵消控制,产生目标方向的扭矩。
实施例1
以应用SPT-140霍尔电推进系统在波音BSS-702SP卫星上应用做位置保持任务为例,对本发明所提出的角动量卸载方法做进一步的说明。
(1)首先根据BSS-702SP卫星上霍尔推进系统推力器的配置和布局情况,获得各台推力器的推力指向角度,如图4所示。图4中CG为卫星的质心,NE、NW、SE、SW分别为四台布置在-Z面的四台霍尔推力器,并且沿X、Y轴均对称分布。对于位置保持任务需要推力器产生的推力均指向卫星质心,因此在卫星星本体坐标系下,定义
γ
θ
(2)确定每台推力器工作时产生的扭矩大小。SPT-140型号霍尔推力器为5kW功率量级,通过参考文献确定其扭矩大小约为T=6.4×10
(3)建立励磁电流方向与扭矩方向的关系。根据图3所示的励磁电流与扭矩方向的关系,确定四台推力器的励磁电流的正负方向,使得在输出正方向励磁电流工作时推力器产生正方向的扭矩,反之输出负方向励磁电流工作时推力器产生负方向的扭矩。
(4)结合四台推力器的推力指向方向,建立励磁电流方向对航天器三轴产生扭矩分量的对应关系,励磁电流组合对三轴产生扭矩的情况见示意图5(a)~(c)。
(5)获得航天器的三轴角动量卸载需求,一般角动量卸载过程只关心卸载需求量最大的轴向的分量,假设航天器X轴角动量需要优先卸载,卸载量为ΔM
(6)以BSS-702SP卫星为例,应用霍尔电推进系统进行位置保持工作的策略一般是NE、NW两台推力器在升交点工作,SE、SW两台推力器在降交点工作,工作时间均为t。根据图5(b)的示意,对NE、SE推力器工作时调用反向励磁电流,NW、SW工作时调用正向励磁电流,产生+X方向的目标扭矩。四台推力器工作后共可产生4γ
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
- 基于霍尔电推进自生扭矩的航天器角动量控制方法和系统
- 一种基于电推进系统的高精度相位控制方法