一种U型构型的星载展开臂及展开方法
文献发布时间:2023-06-19 10:03:37
技术领域
本发明属于星载展开臂技术领域,具体涉及一种U型构型的星载展开臂及展开方法,尤其适用于星上安装空间受限、包络受限又要进行大尺寸、高精度展开的展开臂应用的场合。
背景技术
星载展开臂的主要功能是发射前收拢在卫星侧壁上,入轨后实现将载荷伸展至指定位姿,并保持足够的刚度和精度。星载展开臂一般由多个关节和多节臂杆构成。星载展开臂构型设计时,在卫星坐标系安装基准下,需满足以下硬性约束:(1)收拢包络要求;(2)收拢位姿要求;(3)展开位姿要求;(4)可地面验证要求。现有的星载展开臂的构型应用较多的卫星侧板挂装压紧的方式,以“中高轨道零倾角合成孔径雷达卫星构型”(CN110015444A)为代表,利用舱板的面积,将展开臂收拢压紧在侧板上,必要时将展开臂端部的部分长度悬臂在舱板之外,以满足较大长度的展开臂的需求。该种构型简单、可靠,但其缺点为对展开臂的长度约束较高,难以实现多自由度大尺度的展开臂的构型布局。
发明内容
有鉴于此,本发明的目的是提供一种U型构型的星载展开臂及展开方法,可以解决卫星包络尺寸小和展开臂长度要求长的矛盾。
一种U型构型的星载展开臂,包括卫星主体(1)、第一关节组件(2)、第二关节组件(3)、第一压紧释放装置(4)、第一臂杆组件(5)、第二压紧释放装置(6)、第三关节组件(7)、第三压紧释放装置(8)、第二臂杆组件(9)、第四压紧释放装置(10)、第五压紧释放装置(11)以及第四关节组件(12);
定义卫星主体(1)左侧壁板垂直向左方向为X方向,沿左侧壁板的边长向上方向为Z方向,垂直卫星主体(1)正面并向外方向定义为Y方向;
第一关节组件(2)布置在卫星主体(1)的左侧壁板上,关节轴线与Y轴平行,关节运动行程是89.67°;第二关节组件(3)与第一关节组件直接连接,第二关节组件(3)轴线与X轴平行,关节运动行程为86°;第一臂杆组件(5)一端连接第二关节组件(3),另一端连接第三关节组件(7),布置在卫星主体(1)底侧壁板上,通过第一压紧释放装置(4)和第二压紧释放装置(6)进行压紧和释放,臂杆长度为2m;第三关节组件(7)位于卫星主体(1)右下角的角点处,关节轴线与Y轴平行,关节运动行程为90°;第二臂杆组件(9)的一端与第三关节组件(7)连接,另一端与第四关节组件(12)连接,通过第三压紧释放装置(8)、第四压紧释放装置(10)和第五压紧释放装置(11)压紧在卫星主体(1)右侧壁板上;第四关节组件(12)的轴线与XY面平行,与X轴的夹角为4°,运动行程为202.32°;第四关节组件(12)端部连接板状的大型天线载荷;星载展开臂在初始的收拢状态时,天线载荷的板面与卫星主体(1)右侧壁面平行,天线载荷的板面下端连接第四关节组件(12),天线载荷的板面上端朝下。
较佳的,第二臂杆组件(9)的长度为6m。
一种U型构型的星载展开臂的展开方法,包括如下步骤:
1)第三压紧释放装置(8)、第四压紧释放装置(10)和第五压紧释放装置(11)解除约束,释放第二臂杆组件(9);
2)第三关节组件(7)顺时针运动90°,带动第二臂杆组件(9)和第四关节组件(12)一起运动;则天线载荷的板面随之转动到与卫星主体(1)的正面平行;
3)第一压紧释放装置(4)、第二压紧释放装置(6)解除约束,释放第一臂杆组件(5);
4)第一关节组件(2)顺时针运动89.67°,第二臂杆组件(9)与第一臂杆组件(5)与Z轴平行;
5)第二关节组件(3)逆时针运动86°;
6)第四关节组件(12)逆时针运动202.32°,将大型天线载荷结构伸展至指定位置及姿态,满足载荷工作的位姿需求。
本发明具有如下有益效果:
本发明通过在卫星壁板上爬行的U型构型布局方式有效解决了卫星包络尺寸小和展开臂长度要求长的矛盾,能够在当前的主流卫星平台上实现5m~15m范围内的展开臂布局;
本发明通过关节组件、臂杆组件和压紧释放装置的组合设计,以较少的硬件配置能够实现展开臂收拢状态位姿和展开状态位姿共计12个自由度的需求,实现了系统层面的优化设计;
本发明通过对关节轴线的姿态、关节展开角度和顺序进行约束,实现了运动的关节的轴线均沿水平方向或者重力方向,便于实现地面零重力环境的模拟。
附图说明
图1为本发明的U型构型的星载展开臂结构示意图;
图2为第三、四、五压紧释放装置8,10,11解除约束后的示意图;
图3为第一关节组件顺时针运动89.67°后示意图;
图4为第二关节组件逆时针运动86°后示意图;
图5为将大型天线载荷结构伸展至指定位置示意图。
其中:1-卫星主体;2-第一关节组件;3-第二关节组件;4-第一压紧释放装置;5-第一臂杆组件;6-第二压紧释放装置;7-第三关节组件;8-第三压紧释放装置;9-第二臂杆组件;10-第四压紧释放装置;11-第五压紧释放装置;12-第四关节组件;13-大型天线载荷结构。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
展开臂采用U型构型,沿着卫星舱板表面爬行的布局方式,共由关节组件、臂杆组件和压紧释放装置构成。关节组件负责运动功能和锁定功能,臂杆组件负责实现长距离的转移,压紧释放装置负责压紧和释放展开臂,承受发射段的力学环境。各部分的具体数量可根据不同情况进行调整,典型的配置为四个关节组件、两个臂杆组件和5个压紧释放装置组件。
第一关节组件2固定在卫星舱板上,第一臂杆组件5与关节组件连接,然后是第二关节组件3与第一臂杆组件5连接,后续臂杆组件与关节组件交错布局,压紧释放装置一般安装在臂杆组件与星体之间。另外,根据具体情况可以存在某两个甚至多个关节组件之间直接连接而不通过臂杆组件的过渡,此时等效为臂杆组件的长度为0。上述布局沿着卫星壁板,最终呈现为U型构型。
上述构型轴各关节的轴线位姿及展开顺序满足以下约束:
1)相邻的两个关节轴线之间相互垂直;
2)各个关节的运动行程需要满足约束3);
3)运动顺序上保证运动的关节的轴线均沿水平方向或者重力方向;
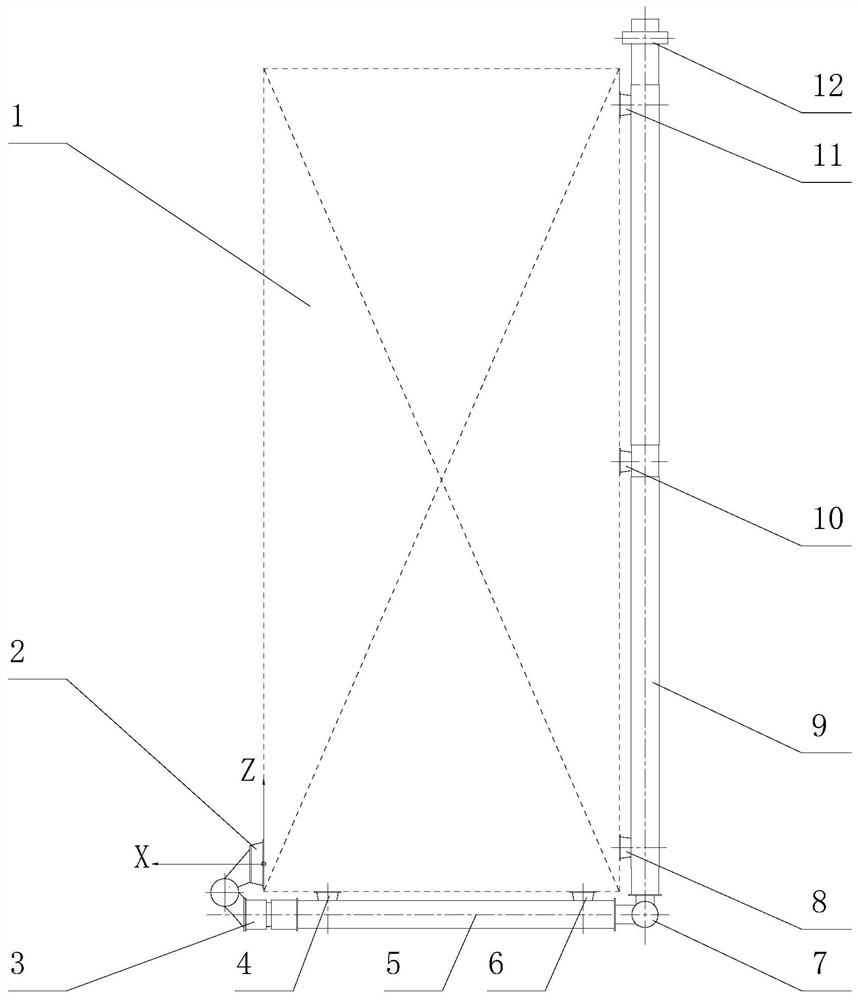
如图1所示:一种U型构型的星载展开臂,包括卫星主体1、第一关节组件2、第二关节组件3、第一压紧释放装置4、第一臂杆组件5、第二压紧释放装置6、第三关节组件7、第三压紧释放装置8、第二臂杆组件9、第四压紧释放装置10、第五压紧释放装置11以及第四关节组件12。
如图1所示,定义卫星主体1左侧壁板垂直向左方向为X方向,沿左侧壁板的边长向上方向为Z方向,垂直卫星主体1正面并向外方向定义为Y方向。
第一关节组件2布置在卫星主体1的左侧壁板上,关节轴线与图中所示的Y轴平行,关节运动行程是89.67°;第二关节组件3与第一关节组件直接连接,第二关节组件3轴线与X轴平行,关节运动行程为86°;第一臂杆组件5一端连接第二关节组件3,另一端连接第三关节组件7,布置在卫星主体1底侧壁板上,通过设置在卫星主体1底侧壁板上的第一压紧释放装置4和第二压紧释放装置6进行压紧和释放,臂杆长度为2m;第三关节组件7位于卫星主体1右下角的角点处,关节轴线与Y轴平行,关节运动行程为90°;第二臂杆组件9的一端与第三关节组件7连接,另一端与第四关节组件12连接,通过设置在卫星主体1的右侧壁上的第三、四、五压紧释放装置8,10,11压紧在卫星主体1右侧壁板上,长度为6m;第四关节组件12的轴线与XY面平行,与X轴的夹角为4°,运动行程为202.32°。第四关节组件12端部连接板状的大型天线载荷;星载展开臂在初始的收拢状态时,天线载荷的板面与卫星主体1右侧壁面平行,天线载荷的板面下端连接第四关节组件12,天线载荷的板面上端朝下。
本发明的工作原理是:
1)第三、四、五压紧释放装置8,10,11解除约束,如图2所示,第二臂杆组件9与第一臂杆组件5呈一条直线;
2)第三关节组件7顺时针运动90°,带动第二臂杆组件9和第四关节组件12一起运动;则天线载荷的板面随之转动到与卫星主体1的正面平行。
3)第一、二压紧释放装置4,6解除约束;
4)第一关节组件2顺时针运动89.67°,如图3所示,第二臂杆组件9与第一臂杆组件5与Z轴平行;
5)第二关节组件3(沿+X方向观测)逆时针运动86°如图4所示,将天线载荷的板面转到与卫星主体1的正面平行;
6)如图5所示,第四关节组件12(沿+X方向观测)逆时针运动202.32°,将大型天线载荷结构伸展至指定位置及姿态,满足载荷工作的位姿需求。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种U型构型的星载展开臂及展开方法
- 星载可动天线的展开机构构型方法