一种基于5G通讯模组的多旋翼无人机
文献发布时间:2023-06-19 10:03:37
技术领域
本申请涉及无人机的领域,尤其是涉及一种基于5G通讯模组的多旋翼无人机。
背景技术
无人机是无人航空器的简称,是一种不载操作人员、用空气动力产生运载工具升力、能够自主或遥控飞行、能够一次使用或回收并且载有杀伤或非杀伤有效载荷的有动力的航空器。总的来说,分为固定翼无人机、无人直升机和多旋翼无人机三大类。多旋翼无人机,是具有三个及以上旋翼轴的特殊的无人驾驶直升机。目前,无人机通过挂载相应的设备,被广泛应用于航拍、测绘和探测等民用领域。
相关技术中,民用无人机的遥控通过设置地面无线信号发射站和机载信号接收装置的配合工作实现,实际遥控距离受到无线信号发射站的信号发射功率和干扰信号强度的影响,一般的民用无人机遥控距离在5km左右。随着通讯技术的发展,5G网络逐渐在国内普及,5G网络由于其数据传输速度快,承载量大的优势,可以作为新的无人机遥控信号传输载体,使得无人机的遥控范围更为广泛、动作更灵敏,且无人机上设备回传给操控端的视频和测量数据等能够及时、高质量的传输到操作人员的终端处。
针对上述中的相关技术,发明人认为存在有由于5G通讯问世时间短,覆盖范围尚未全面,局部网络尚不稳定,造成无人机运动至5G信号未覆盖位置或者信号偏弱位置,容易与通讯网络断开而失去响应的缺陷。
发明内容
为了改善无人机运动到5G信号弱或信号未覆盖地区与通讯网络断开失去响应的缺陷,本申请提供一种基于5G通讯模组的多旋翼无人机。
本申请提供的一种基于5G通讯模组的多旋翼无人机采用如下的技术方案:
一种基于5G通讯模组的多旋翼无人机,包括无人机本体,所述无人机下侧设有挂载盘,所述挂载盘上固设有两根探测杆,所述探测杆向无人机本体侧向延伸,所述探测杆远离无人机本体的一端端部固设有信号监测器。
通过采用上述技术方案,通过设置两根探测杆,探测杆端部的信号监测器设置在探测杆远离无人机本体的一端,从而在距离无人机本体较远的位置探测周围的5G信号强弱,从而将在无人机飞行过程中,当探测杆端部的信号监测器监测的5G信号减弱到一定值时,信号监测器发出指令,阻止无人机继续靠近信号5G信号减弱的方向,降低无人机暴露在5G信号弱或者信号未覆盖的区域,从而与通讯网络断开而失去响应的可能性。
可选的,所述挂载盘与无人机本体底端转动连接,所述无人机本体上设有用于驱动挂载盘转动的驱动电机。
通过采用上述技术方案,通过驱动电机带动挂载盘转动,从而使探测杆及探测杆端部的信号监测器围绕挂载盘的圆心进行旋转,进而当无人机由于某个信号监测器监测到5G信号减弱而悬停时,通过驱动电机驱动挂载盘转动从而调整信号监测器的位置,便于确定5G信号减弱的具体方向,便于操作人员调整航行方向。
可选的,所述探测杆包括固定杆、第一折杆和第二折杆,所述固定杆与挂载盘固定连接,所述第一折杆一端与固定杆的端部铰接,所述第二折杆与第一折杆远离固定杆的一端铰接,所述挂载盘上设有用于折叠和展开探测杆的控制机构。
通过采用上述技术方案,通过将探测杆设置成固定杆、第一折杆和第二折杆,从而便于操作人员将探测杆折叠收纳,减少了无人机整体占用的空间,提升了装置的便利性,通过控制机构控制探测杆的展开和折叠,便于无人机本体在航行过程中将探测杆折叠,从而穿过较为狭窄或者具有障碍物的航线。
可选的,所述控制机构包括收卷电机、收卷辊、控制线和两个扭簧,所述第一折杆与固定杆铰接位置一侧设有用于限制第一折杆和固定杆相对转动方向的第一限位块,所述第二折杆与第一折杆铰接位置一侧设有用于限制第一折杆和第二折杆相对转动方向的第二限位块,所述第一限位块与第二限位块位于第一折杆相背的两侧,两个所述扭簧分别位于第一折杆与第二折杆、第一折杆与固定杆的铰接处,所述扭簧处于自然状态时第一折杆与第二折杆、第一折杆与固定杆之间的夹角均接近平角,所述挂载盘上固定连接有收卷电机,所述收卷电机的电机轴上固定连接有了收卷辊,所述收卷辊上收卷有两根控制绳,所述第一折杆与固定杆铰接处朝向第一限位块的一侧设有第一连接端,所述第一折杆与第二折杆铰接处朝向第二限位块的一侧设有第二连接端,所述控制绳首先穿过第二连接端而后穿过第一连接端并最终与第二折杆远离第一折杆的一端固定连接。
通过采用上述技术方案,通过设置限位块,限制第一折杆、第二折杆和固定杆之间相对转动的角度和方向,当收卷电机的电机轴带动收卷辊转动时,控制绳被拉动,第二折杆远离第一折杆的一端被控制绳牵引向第一连接端方向靠近,同时第一折杆远离固定杆的一端在控制绳对第二连接端的牵引下向收卷辊靠近,因此第一折杆与固定杆、第一折杆与第二折杆均位于相应铰接处发生弯折,使第二折杆和第一折杆靠近并折叠收拢在固定杆的一侧,当收卷电机的电机轴反转使控制绳松弛时,驱动电机的电机轴转动。
可选的,所述第一折杆、第二折杆和固定杆均为空心杆,所述控制绳穿过第二连接端后穿入第一折杆内部并从第一折杆靠近第一连接端位置穿出后穿过第一折杆。
通过采用上述技术方案,通过将第一折杆、第二折杆和固定杆设置为空心杆,降低了探测杆整体的重量,进而降低了无人机的载荷。通过使控制绳穿入第一折杆内部,减少了控制绳在运动过程中发生盘结的可能性,提升了驱动的稳定性。
可选的,所述第一折杆两端内壁上均转动连接有定滑轮,所述控制绳穿入第一折杆后首先绕过邻近的定滑轮并在绕过另一个定滑轮后穿出第一折杆。
通过采用上述技术方案,通过设置定滑轮,减少了控制绳弯折处与装置发生抵触摩擦,造成装置运动卡滞的可能性,降低了控制绳运动的阻力,也降低了控制绳的磨损。
可选的,所述第二折杆远离第一折杆的一端设有第一施力柱,所述第一施力柱垂直于第二折杆设置,所述控制绳与第一施力柱远离第二折杆的一端固定连接,所述第二限位块上设有第二施力柱,所述第二施力柱垂直于第一折杆设置,所述第一连接端位于第二施力柱的端部。
通过采用上述技术方案,通过设置第一施力柱和第二施力柱的设置,使控制绳拉动探测杆进行折叠时,与第一折杆和第二折杆呈一定角度,减少了牵引绳与第一折杆、第二折杆平行造成牵引绳的拉力平行于探测杆而产生传动死点,使探测杆无法折叠的可能性。
可选的,所述无人机本体底部设有升降气缸,所述升降气缸的活塞杆垂直于挂载盘方向延伸,所述挂载盘朝向无人机本体的侧壁上开设有呈环形延伸的滑槽,所述升降气缸的活塞杆端部固设有连接杆,所述连接杆端部固设有弧形燕尾块,所述弧形燕尾块与滑槽相适配,所述驱动电机的电机轴上同轴设置有花键轴,所述花键轴穿入挂载盘且穿入位置设有与花键轴相适配的键槽。
通过采用上述技术方案,通过设置升降气缸,升降气缸的活塞杆伸出时,挂载盘及挂载盘上各个机构远离无人机本体,使无人机整体的重心下移,当无人机航行遇到大风天气时,通过将重心下移的方式减少无人机收到大风影响产生翻倒坠机的可能性,当无人机在风速相对较小的环境下航行时,气缸的活塞杆收回,使挂载盘靠近无人机的动力源,从而减少了无人机航行过程中产生的晃动,提升航行稳定性。
可选的,所述探测杆朝向无人机上方的一侧设有弧面突起。
通过采用上述技术方案,通过在探测杆上设置弧面突起,从而当空气吹过探测杆时,位于探测杆上方的风速大于探测杆下方的风速,根据空气动力学,气流吹过探测杆时对探测杆产生向上的浮力,从而降低无人机的载荷重量。
可选的,所述探测杆的端部设有近电感应器。
通过采用上述技术方案,通过近电感应器,当无人机靠近高压线缆时,近电感应器发出警报,提示操作人员控制无人机远离高压线缆,以免造成航行事故。
综上所述,本申请包括以下至少一种有益技术效果:
1.通过设置探测杆和信号监测器的设置,在无人机本体周围持续的监测各个方向上的5G通讯信号强度,当信号监测器监测到5G信号减弱到阈值时,信号监测器发出指令使无人机停止靠近该方向,减少无人机运动到5G信号弱或者信号盲区内,与通讯信号断开而失去响应的可能性;
2.通过将探测杆设置为由第一折杆、第二折杆和固定杆铰接构成,并通过控制机构控制探测杆的展开和折叠,便于减少无人机整体占用的空间,便于无人机穿过狭窄空间,以及便于无人机的携带和运送;
3.通过设置升降气缸,并使升降气杆与挂载盘滑动连接,从而控制挂载盘及挂载盘上各机构与无人机本体之间的距离,从而调整无人机整体重心,便于无人机适应大风天气的航行。
附图说明
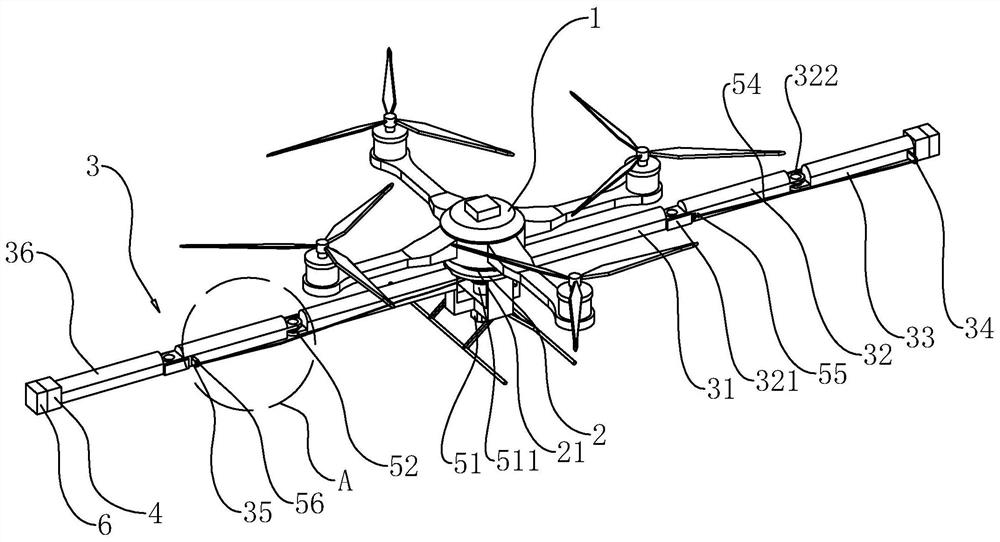
图1是本申请实施例用于体现装置整体的结构示意图。
图2是图1中A部分的放大结构示意图。
图3是本申请实施例用于体现升降气缸和驱动电机位置结构的示意图。
图4是图3中B部分的放大结构示意图。
图5是本申请实施例用于体现控制机构结构的示意图。
图6是图5中C部分的放大结构示意图。
图7是本申请实施例用于体现第一折杆内部结构的示意图。
附图标记说明:1、无人机本体;11、驱动电机;111、花键轴;12、升降气缸;121、连接杆;122、弧形燕尾块;2、挂载盘;21、滑槽;22、键槽;3、探测杆;31、固定杆;32、第一折杆;321、第一限位块;322、第二限位块;33、第二折杆;34、第一施力柱;35、第二施力柱;36、弧面突起;4、信号监测器;5、控制机构;51、收卷电机;511、收卷辊;512、分隔板;52、扭簧;54、控制绳;55、第一连接端;56、第二连接端;57、定滑轮;6、近电感应器。
具体实施方式
以下结合附图1-6对本申请作进一步详细说明。
本申请实施例公开一种基于5G通讯模组的多旋翼无人机。参照图1和图2,一种基于5G通讯模组的多旋翼无人机包括无人机本体1,无人机本体1下侧转动连接有挂载盘2,无人机本体1底端开设有容纳槽,容纳槽内固定连接有驱动电机11,驱动电机11用于驱动挂载盘2转动。无人机本体1下侧设有升降机构,用于驱动挂载盘2靠近或者远离无人机本体1。挂载盘2上固设有若干探测杆3,本实施例选用两根探测杆3,探测杆3远离挂载盘2一端的端部设有信号监测器4和近电感应器6,探测杆3可以折叠,且挂载盘2上设有驱动探测杆3折叠和展开的控制机构5。
参照图3和图4,升降机构包括无人机本体1下侧固设的两个升降气缸12,两个升降气缸12部分位于无人机的外壳内,升降气缸12的活塞杆垂直于挂载盘2表面延伸,且气缸活塞杆端部固定连接有连接杆121,连接杆121朝向挂载盘2的一端固定连接有弧形燕尾块122,挂载盘2上与弧形燕尾块122相对的位置开设有环形延伸的滑槽21,滑槽21为燕尾槽,弧形燕尾块122与滑槽21相适配,从而实现了挂载盘2与无人机本体1的转动连接。驱动电机11的电机轴上固定连接有花键轴111,挂载盘2上相应的位置开设有键槽22,花键轴111穿入键槽22内且与键槽22相适配,当升降气缸12的活塞杆伸出时,花键轴111端部始终位于键槽22内。通过升降气缸12驱动挂载盘2靠近或远离无人机本体1,从而调整无人机的重心,便于无人机适应大风环境航行。驱动电机11的电机轴通过花键轴111与键槽22的配合始终与挂载盘2保持配合从而驱动挂载盘2转动。
参照图5和图6,两根探测杆3均有一端固定连接在挂载盘2上,且两根探测杆3沿挂载盘2的径向向相反的方向延伸。探测杆3包括固定杆31、第一折杆32和第二折杆33,固定杆31与第一折杆32铰接,且第一折杆32远离固定杆31的一端与第二折杆33铰接。挂载盘2上设有控制机构5,控制机构5包括位于第一折杆32与第二折杆33铰接处、第一折杆32与固定杆31的铰接处的两个扭簧52,当扭簧52处于自然状态时,第一折杆32、第二折杆33和固定杆31处在一条直线上。第一折杆32的侧壁上位于第一折杆32与固定杆31的铰接处一侧设有第一限位块321,第一折杆32的侧壁上位于第一折杆32与第二折杆33的铰接处一侧设有第二限位块322,第一限位块321和第二限位块322分别位于第一折杆32向背的两侧壁上。
参照图5和图6,挂载盘2上固定连接有收卷电机51,收卷电机51的电机轴上固定连接有收卷辊511,收卷辊511上设有分隔板512,分隔板512与收卷辊511的轴线垂直。收卷辊511上位于分隔板512上方和分隔板512下方均收卷有一根控制绳54。第一折杆32上位于第一限位块321靠近第二折杆33的一侧固设有第一连接端55,第一折杆32上位于第二限位块322靠近固定杆31的一侧设有第二施力柱35,第二施力柱35垂直于第一折杆32设置,第二施力柱35远离第一折杆32的一端设有第二连接端56,第一连接端55和第二连接端56均为金属环。
参照图7,第一折杆32、第二折杆33和固定杆31均为空心杆,且第一折杆32长度方向两端的内壁上均固定连接有定滑轮57。控制绳54从收卷辊511处伸出后首先穿过第二连接端56,而后控制绳54穿入第一折杆32内部,绕过临近的定滑轮57后向绕过穿入位置远端的定滑轮57,并且从后绕过的定滑轮57一侧穿出第一折杆32。第二折杆33远离第一折杆32的端部侧壁上固设有第一施力柱34,第一施力柱34位于第二折杆33背离第二限位块322的一侧,控制绳54从第一折杆32穿出后首先穿过第一连接端55,最后与第一施力柱34远离第二折杆33的一端固定连接。控制机构5、第一施力柱34和第二施力柱35位于两探测杆3上的位置关于挂载盘2的轴线轴对称设置。
参照图5,当收卷电机51工作并将控制绳54向收卷辊511上收卷时,控制绳54产生缩回的趋势,从而拉动第一施力柱34,使第二折杆33向第一折杆32的方向弯折,同时控制绳54将第二连接端56向固定杆31靠近收卷辊511的一端牵引,从而使第一折杆32向固定杆31方向弯折,实现了对探测杆3的折叠。当需要展开探测杆3时,收卷电机51反转,控制绳54松弛后在扭簧52的作用下使固定杆31第一折杆32和第二折杆33展开。其中第一施力柱34和第二施力柱35的作用为当控制绳54牵拉第一折杆32端部和第二折杆33端部时,减少拉力与探测杆3平行产生传动死点使机构卡滞的情况,提升了结构的实用性。
参照图5,探测杆3远离挂载盘2的一端固定有信号监测器4和近电感应器6,信号监测器4选用监测5G信号强度和网络速度的信号监测器4,近电感应器6选用探测范围在5米及以上的近电感应器6。监测器和近电感应器6分别于无人机本体1的控制器电连接。
本申请实施例一种基于5G通讯模组的多旋翼无人机的实施原理为:通过在探测杆3远离无人机的一端设置信号监测器4监测无人机周围5G通讯信号的强弱,当信号监测器4监测到5G信号减弱时,发送信号给无人机本体1的控制器,使无人机停止前进并原地悬停。通过驱动电机11带动挂载盘2转动,使信号监测器4环绕无人机的周向做匀速公转运动,从而均匀的探测无人机周围的5G信号强度变化,通过对比两个信号监测器45G信号的强弱判断信号减弱的方向,从而使便于控制人员驾驶无人机快速远离信号减弱的方向,减少无人机暴露因在5G信号弱或5G信号未覆盖的区域而脱离控制的可能性。
通过控制机构5对探测杆3进行展开和折叠,减少无人机占用的空间,使无人机容易穿过狭小空间或者障碍物较多的空间。
通过升降气缸12控制挂载盘2与无人机底部之间的距离,从而调整无人机整体重心,当重心较低时,便于无人机在大风天气航行,当重心较高即距离无人机动力旋翼较近时,无人机运动姿态调整迅速,摇晃较少。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种基于5G通讯模组的多旋翼无人机
- 一种5G通讯模组及5G通讯系统