一种无舵面控制的尾座式垂直起降飞行器
文献发布时间:2023-06-19 10:03:37
技术领域
本发明涉及一种飞行器,具体涉及一种无舵面控制的尾座式垂直起降飞行器;属于航空飞行器技术领域。
背景技术
尾座式无人机是一种垂直起降无人机,集多旋翼飞行器和固定翼飞行器的优点于一身,既可以实现零水平速度垂直起飞和着陆,又可以进行悬停,还能以固定翼飞行器的飞行方式水平飞行,并同时具有固定翼飞行器较大航程的优势,是一种非常有发展前途的飞行器。
但是,现有技术中的可垂直起降尾座式垂直起降飞行器在垂直起降阶段和固定翼高速巡航阶段分别采用两套控制机构,存在冗余,这增加了飞行器的死重。另外,虽然多旋翼飞行器可以实现垂直起降,但是在高速飞行时阻力很大,达不到固定翼飞行器的巡航速度。
鉴于上述原因,有必要对尾座式垂直起降飞行器进行优化改进,以提高升力并优化航向稳定性。
发明内容
为解决现有技术的不足,本发明的目的在于提供一种既能够实现垂直起降,又可以高速前飞的尾座式垂直起降飞行器。
为了实现上述目标,本发明采用如下的技术方案:
本发明公布了一种无舵面控制的尾座式垂直起降飞行器,包括机头、机身、机翼组件、翼尖、动力组件及尾翼组件,所述机头与机身相连,所述机翼组件连接于机身中段,所述翼尖安装于机翼端部且其结构为锥状体,所述动力组件包括与翼尖相连接螺旋桨和驱动装置,所述尾翼组件位于机身尾部。
优选地,前述机翼组件由n个独立且均布于机身周向的机翼构成,相邻机翼间的夹角为360°/n。
更优选地,前述n为不小于4的偶数,比如4、6、8……均可。
再优选地,前述n为4,相邻机翼间的夹角为90°,4个机翼构成“X”字型。
更优选地,前述翼尖为自前向后截面积渐进增大的锥状体,可有效抑制机翼下翼面的气流流向上翼面,减小机翼翼尖涡流,提高机翼升力,减小机翼诱导阻力。
更优选地,前述尾翼组件由4个独立且均匀分布的尾翼构成“十”字型,相邻尾翼间的夹角为90°。
进一步优选地,前述“X”字型机翼与“十”字型尾翼构成“米”字型分布,结构精巧紧凑,在有限的展长内增加了飞行器的翼面积,提高了飞行器在有限空间内的升力。
再进一步优选地,前述驱动装置和螺旋桨安装于所述锥状体的截面积最大处且桨叶向后,所述动力组件数量和机翼数量保持一致,这样一来,动力系统就构成了与机翼布局相一致的布局结构,比如4个机翼构成“X”字型分布时,则动力组件亦为4个,构成“X”字型动力布局。动力组件全程承担了飞行器飞行控制系统的执行机构角色,省去了常规固定翼飞行器的控制舵面(如副翼、方向舵、升降舵等)和控制舵面驱动机构,减小了飞行器死重,降低了飞行器飞行时的附加阻力,提高了飞行器的有效载重能力。
更优选地,前述机身和机头的头罩均为回转体结构,所述机身为圆柱体结构,所述头罩为类半球体结构。
更进一步优选地,前述机翼组件为中空结构,所述驱动装置的连接线自机翼内部穿过。
本发明的有益之处在于:
(1)本发明的飞行器为无舵面控制的尾座式垂直起降飞行器,具有两种飞行模式——多旋翼飞行模式和固定翼飞行模式:既具有多旋翼飞行器的特点,能够实现垂直起降和空中悬停;又具有固定翼飞行器的特点,能够实现高速飞行和经济巡航;
(2)本发明的飞行器结构精巧紧凑且布局独特巧妙,占用空间小,兼具“X”字型机翼和“十”字型尾翼,可以在有限展长内大大增加飞行器翼面积,提高飞行器在有限空间内的升力;且机翼和尾翼巧妙地布局为“米”字形,能够减小高速飞行时机翼产生的下洗流对尾翼的影响,使得飞行器在高速前飞时升力更大、阻力更小,能够更好地实现经济巡航;
(3)本发明的飞行器,其动力系统布局与机翼布局一致,当机翼布局为“X”字型时,4个螺旋桨亦构成“X”字型动力布局。当飞行器为多旋翼模式飞行时,依靠控制“X”字型动力的4个螺旋桨转速来实现飞行控制;当飞行器为固定翼飞行时,也依靠控制“X”字型动力的4个螺旋桨转速来实现姿态的飞行控制。动力组件全程承担了飞行器飞行控制系统的执行机构角色,可以省去常规固定翼飞行器的控制舵面(如副翼、方向舵、升降舵等)和控制舵面驱动机构,减小飞行器死重,降低飞行器飞行时的附加阻力,提高飞行器有效载重能力;
(4)本发明的飞行器尾翼结构进行了改进,采用“十”字型尾翼。当飞行器为多旋翼模式飞行时,“十”字型尾翼可以增加飞行器的偏航稳定性,当飞行器为固定翼模式飞行时,“十”字型尾翼则可以增加飞行器的滚转和偏航稳定性;
(5)本发明中的飞行器翼尖采用了特殊结构的锥状体,并用于动力组件的安装,可以有效抑制机翼下翼面的气流流向上翼面,减小翼尖涡流,加速流经机翼的气流流动,进而提高机翼升力,减小机翼诱导阻力,优化飞行器的飞行性能。
附图说明
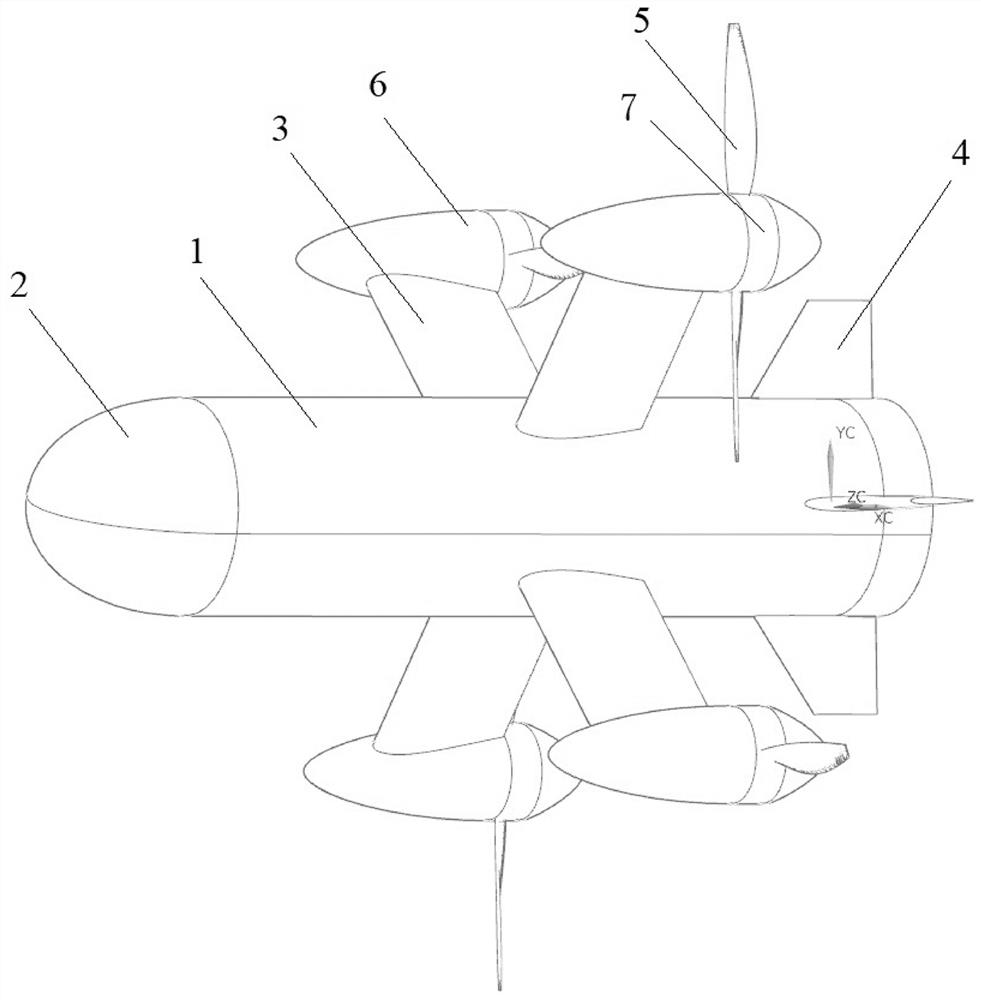
图1是本发明的一种无舵面控制的尾座式垂直起降飞行器的优选实施例的立体结构示意图;
图2是图1所示实施例的另一视角的结构示意图;
图3是图1所示实施例的主视图;
图4是图1所示实施例的侧视图。
图中附图标记的含义:1、机身,2、头罩,3、机翼,4、尾翼,5、螺旋桨,6、翼尖,7、驱动装置。
具体实施方式
以下结合附图和具体实施例对本发明作具体的介绍。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
参见图1和图2,本发明的飞行器为无舵面控制的尾座式垂直起降飞行器,包括机身1、安装于机身1前部的机头、机翼组件、翼尖、动力组件及尾翼组件。机头包括头罩2和安装于头罩2内部的空速计、传感器等常规部件,这与现有技术中大体相似,故本发明中不作赘述。
为赋予飞行器较好的飞行特性,降低飞行阻力,机身1与头罩2都均设计为回转体结构。具体到本实施例中,如图4所示,机身1为圆柱体,不但有效增加了载荷舱的容积,还可降低机身1外部的气动阻力。头罩2为类半球体,所谓“类半球体”,是指其结构与半球体相似,但又相较于半球体进行了改进,如结合流体力学的需求进行了局部弧度的适应调整等,但其整体应仍为对称结构。
本发明的尾座式垂直起降飞行器布局独特精巧,具有n个独立且均匀分布于机身1周向的机翼3,相邻机翼3间的夹角为360°/n。为了取得较好的布局效果,n应为不小于4的偶数,比如4、6、8……均可。具体到本实施例中,n为4,即该飞行器具有4个机翼3,相邻机翼3间的夹角为90°,4个机翼3构成“X”字型,如图1所示。
如图2所示,在机翼3的端部均安装有锥状体结构的翼尖6,该锥状体自前(头罩2)向后(尾翼4)直径渐进增大,这样能够有效抑制机翼下翼面的高压气流流向上翼面,提高机翼升力,减小翼尖6漩涡,从而减小翼尖6诱导阻力。需要特别说明的是,动力组件包括螺旋桨5和驱动装置7,安装于锥状体的后方(截面积最大处)且桨叶向后,在动力组件的后方安装有整流罩。这样一来,当机翼为“X”字型布局时,则动力组件亦构成了“X”字型布局,螺旋桨5高速旋转产生垂直于螺旋桨5桨盘平面的拉力,形成“X”字型动力,用于承担飞行器飞行控制系统执行机构角色,而且可以加大流经机翼3的气流流速,从而提高机翼3升力。
结合图1和图2可见,本发明的飞行器其尾翼组件由4个独立且均匀分布的尾翼构成“十”字型布局,相邻尾翼间的夹角为90°。具体到本实施例中,X”字型机翼与“十”字型尾翼构成“米”字型分布,如图3所示,这样的结构设计能够减小机翼下洗流对尾翼的影响,减小螺旋桨尾流对尾翼的影响,加速流经机翼的气流,进一步提高飞行器升力,并提高飞行器的飞行稳定性。
因此,本实施例的尾座式垂直起降飞行器布局为:“X”字型机翼3、“X”字型动力组件和“十”字型尾翼4,动力组件全程承担飞行器飞行控制系统的执行机构角色,省去了常规固定翼飞行器的控制舵面(如副翼、方向舵、升降舵等)和控制舵面驱动机构,结构精巧紧凑,占用空间小,这样就能在有限的展长内增加翼面积,减少飞行器机体重量,进而提高飞行器的升力,提高飞行器飞行稳定性。
为了更好地理解和实施本发明,下面对该飞行器的工作过程进行简要说明:该飞行器垂直起降时,如图2所示,飞行器机头朝上,按多旋翼飞行模式飞行, “X”字型动力系统提供主要升力,并按“X”字型多旋翼控制方式控制“X”字型螺旋桨5的转速,通过改变“X”字型动力系统的升力大小,从而控制飞行器悬停、俯仰、偏航、滚转、前飞、后退、升降等操作。当该飞行器需要高速前飞时,飞行器机头渐渐低下,变成固定翼飞行模式,如图1和图4所示,由“X”字型机翼3、机身1、“十”字型尾翼4共同提供主要升力,“X”字型动力系统则提供推力,克服前飞阻力,即由四个螺旋桨5提供前飞动力实现巡航高速平飞,飞行过程中通过控制“X”字型螺旋桨5的转速,从而改变“X”字型动力系统的推力大小,形成俯仰力矩、滚转力矩和偏航力矩,实现对飞行器的俯仰、滚转和偏航姿态的控制,省去了常规固定翼飞行器的控制舵面(如副翼、方向舵、升降舵等)和控制舵面驱动机构,减少飞行器死重,降低飞行器飞行时的附加阻力,进而提高有效载重能力。
综上,本发明的尾座式垂直起降飞行器具有两种飞行模式,即多旋翼飞行模式和固定翼飞行模式,既具有多旋翼飞行器的特点,能够实现垂直起降和空中悬停,又具有固定翼飞行器的特点,能够实现高速飞行和经济巡航。该飞行器的结构精巧紧凑,布局巧妙创新,占用空间小,在有限展长内大大增加了飞行器翼面积,提高了飞行器在有限空间内的升力;“X”字型机翼3、“X”字型动力组件和“十”字型尾翼4的创新布局,动力组件全程承担了飞行器飞行控制系统的执行机构角色,省去了常规固定翼飞行器的控制舵面(如副翼、方向舵、升降舵等)和控制舵面驱动机构,结构精巧紧凑,占用空间小,这样就能在有限的展长内增加翼面积,减少飞行器机体重量,进而提高飞行器的升力,优化飞行稳定性。而且,当飞行器多旋翼模式飞行时,“十”字型尾翼可以增加飞行器的偏航稳定性,固定翼模式飞行时,“十”字型尾翼可以增加飞行器的滚转和偏航稳定性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
- 一种无舵面控制的尾座式垂直起降飞行器
- 一种可垂直起降的尾座式共轴反桨无尾布局飞行器