一种智能家用艾灸机器人
文献发布时间:2023-06-19 10:03:37
技术领域
本发明公开涉及医疗机器人的技术领域,尤其涉及一种智能家用艾灸机器人。
背景技术
艾条灸是将艾条点燃后在施灸部位(穴位)进行熏灸的方法。通常,普遍的艾条灸分为手持灸和艾灸器灸两种。手持灸,为传统中医医师的艾灸作业,包括:回旋灸、往返灸、雀啄灸、定位灸等传统古法艾灸作业;而艾灸器灸,主要是应用艾灸盒,施灸时,把温艾灸盒安放于平坦的应灸部位,将点燃的艾卷对准穴位,置于铁纱上,盖上盒盖,其中,艾盒盖打开的大小程度可根据温度调节,每次施灸时间在15-30分钟。
传统手持艾条灸具有强身健体,延年益寿、提高机体的免疫功能,增强抗病能力,减少疾病的发生等诸多作用,越来越受到大家青睐,尤其是中老年人来中医院人工灸的越来越多,存在患者排队、预约紧张等医患资源不足的问题,如何让中老年人在家中就能进行施灸呢?
人们已经考虑采用机器人的形式,例如:中国专利CN20171138364,一种双目视觉穴位定位仪及其工作方法;中国专利CN201910482961,一种艾灸智能协作机器人及其操作方法;中国专利CN201910951488,艾灸机器人以及中国专利CN201911195810,一种五自由度混联艾灸机器人,均公开了艾灸机器人的结构,但所采用的机器人手段已经改变了的传统手持艾条灸的工艺,用艾灸粉末、艾灸块来取代艾灸条,已经不具有传统中医人工手持艾条灸预热、扩点、往复、旋转的灸条施灸的特色。
因此,如何研发一种新型的智能家用艾灸机器人,以真正还原手持灸的过程,确保艾灸的效果,成为人们亟待解决的问题。
发明内容
鉴于此,本发明提供了一种智能家用艾灸机器人,以真正高度还原手持灸的过程,确保艾灸效果。
本发明提供的技术方案,具体为,一种智能家用艾灸机器人,该机器人包括:底座、智能机械手臂、艾灸作业执行机构、艾灸辅助盒子给进机构、艾灸辅助盒子、控制器以及排烟系统;
所述底座用于所述艾灸机器人的整体支撑;
所述智能机械手臂具有固定端和自由端,所述智能机械手臂的固定端与所述底座固定连接;
所述艾灸作业执行机构包括:艾灸条给进滑台机构、角度调节电机、艾条夹持装置、距离传感器以及视觉传感器;
所述角度调节电机与所述智能机械手臂的自由端连接;
所述艾灸条给进滑台机构与所述智能机械手臂的自由端转动连接,且所述艾灸条给进滑台机构与所述角度调节电机的输出轴驱动连接,所述艾灸条给进滑台机构在所述角度调节电机的驱动下,可相对所述智能机械手臂进行角度调节;
所述艾条夹持装置与所述艾灸条给进滑台机构连接,用于进行艾灸条的夹持,且所述艾条夹持装置可相对所述艾灸条给进滑台机构进行上下移动;
所述距离传感器用于检测所述艾条夹持装置相对所述患者的距离;
所述视觉传感器用于检测所述艾条夹持装置夹持的艾灸条的点燃端相对所述患者的位置;
所述艾灸辅助盒子给进机构位于所述艾灸作业执行机构的一侧,与所述智能机械手臂的自由端固定连接;
所述艾灸辅助盒子与所述艾灸辅助盒子给进机构连接,且所述艾灸辅助盒子可相对所述艾灸辅助盒子给进机构进行旋转以及上下移动,所述艾灸辅助盒子包括:壳体、两个滑动封盖、封盖驱动装置以及削灰刀片;
所述壳体的上端敞口,下端底面为防烫网;
两个所述滑动封盖分别滑动扣装在所述壳体的上端敞口处;
所述封盖驱动装置设置在所述壳体内,且分别与两个所述滑动封盖驱动连接;
所述削灰刀片设置在所述壳体内,且与所述壳体的内壁固定连接;
所述排烟系统包括:前端排烟管、过滤器、后端排烟管以及抽吸动力箱;
所述前端排烟管的进烟端与所述壳体上的排烟口连接;
所述过滤器的进烟端与所述前端排烟管的出烟端连接;
所述后端排烟管的进烟端与所述过滤器的出烟端连接;
所述抽吸动力箱的进烟端与所述后端排烟管的出烟端连接;
所述控制器的输入端分别与所述智能机械手臂的输出端、所述距离传感器的输出端以及所述视觉传感器的输出端连接,所述控制器的输出端分别与所述智能机械手臂的控制端、所述艾灸作业执行机构的控制端以及艾灸辅助盒子给进机构的控制端、所述封盖驱动装置的控制端以及所述抽吸动力箱的控制端连接。
优选,所述艾灸作业执行机构还包括:红外温度传感器;
所述红外温度传感器用于检测所述患者艾灸处的表面皮肤温度;
所述红外温度传感器的输出端与所述控制器的输入端连接。
进一步优选,所述艾灸条给进滑台机构包括:第一给进滑台底座、第一给进丝杠、第一给进驱动电机以及两个第一给进导向杆;
所述第一给进滑台底座的两端分别设置有垂直向外延伸的第一定位板和第二定位板,且在所述第一定位板上设置有第一安装孔,在所述第二定位板上设置有限位槽,且所述限位槽的位置与所述第一安装孔的位置相对;
所述第一给进丝杠的两端分别转动设置在所述第一定位板的第一安装孔以及所述第二定位板的限位槽内;
两个所述第一给进导向杆分别位于所述第一给进丝杠的两侧,且每个所述第一给进导向杆的两端均分别与所述第一定位板和所述第二定位板固定连接;
所述第一给进驱动电机与所述第一定位板固定连接,且所述第一给进驱动电机的输出轴与所述第一给进丝杠驱动连接。
进一步优选,所述艾条夹持装置包括:基座、连接块、艾条插座以及第一旋转电机;
所述基座包括:定子、轴承以及转子;
所述定子内部设置有安装腔体;
所述轴承的外套与所述定子的安装腔体内壁固定连接;
所述转子的外壁与所述轴承的内套固定连接;
所述连接块的中部设置有螺孔,在所述螺孔的两侧设置有安装孔,所述连接块通过所述螺孔螺纹套装在所述艾灸条给进滑台机构中第一给进丝杠的外部,所述连接块通过两个所述安装孔滑动套装在两个所述第一给进导向杆的外部,且所述连接块的侧壁与所述基座中的定子固定连接;
所述艾条插座位于所述基座内,与所述转子驱动连接;
所述第一旋转电机的输出端与所述基座中的转子驱动连接。
进一步优选,所述艾灸辅助盒子给进机构包括:第二给进滑台底座、第二给进丝杠、第二给进驱动电机、两个第二给进导向杆、旋转托台、旋转支架以及第二旋转电机;
所述第二给进滑台底座的两端分别设置有垂直向外延伸的第三定位板和第四定位板,在所述第三定位板上设置有安装孔,在所述第四定位板上设置有限位槽,且所述限位槽的位置与所述安装孔的位置相对;
所述第二给进丝杠的两端分别转动设置在所述第三定位板的安装孔以及所述第四定位板的限位槽内;
所述第二给进驱动电机与所述第三定位板固定连接,且所述第二给进驱动电机的输出轴与所述第二给进丝杠驱动连接;
两个所述第二给进导向杆分别位于所述第二给进丝杠的两侧,且每个所述第二给进导向杆的两端均分别与所述第三定位板和所述第四定位板固定连接;
所述旋转托台上端敞口,内部设置有安装腔,在所述旋转托台的一侧设置有连接块,所述连接块上设置贯通上下两端的螺孔,在所述螺孔的两侧设置有贯通上下两端的通孔,所述旋转托台通过连接块上的螺孔螺纹套装在所述第二给进丝杠的外部,两侧的通孔滑动套装在邻近的第二给进导向杆的外部;
所述旋转支架一端通过轴承嵌套安装在所述旋转托台的安装腔内,所述旋转支架的另一端与所述艾灸辅助盒子的壳体固定连接;
所述第二旋转电机与所述旋转托台固定连接,且所述第二旋转电机的输出轴与所述旋转支架驱动连接。
进一步优选,所述封盖驱动装置包括:封盖驱动电机、主动齿轮、从动齿轮、反向齿轮以及传动带;
所述封盖驱动电机与所述壳体的内壁固定连接;
所述主动齿轮固定套装在所述封盖驱动电机的输出轴外部,与一个所述滑动封盖驱动啮合;
所述从动齿轮与所述反向齿轮驱动啮合,且所述反向齿轮同时与另一个所述滑动封盖驱动啮合;
所述传动带将所述主动齿轮和所述从动齿轮传动连接;
所述封盖驱动电机的控制端与所述控制器的输出端连接。
进一步优选,所述艾灸辅助盒子还包括:排气板以及排气驱动电机;
在所述壳体的侧壁上设置有排气口,所述排气板的大小与所述排气口的大小适配,且所述排气板滑动设置在所述排气口处;
所述排气驱动电机的输出轴套装有驱动齿轮,所述驱动齿轮与所述排气板驱动啮合,且所述排气驱动电机的控制端与所述控制器的输出端连接。
进一步优选,智能机械手臂为六轴智能机械手臂。
本发明提供的智能家用艾灸机器人,主要由底座、智能机械手臂、艾灸作业执行机构、艾灸辅助盒子给进机构、艾灸辅助盒子、控制器以及排烟系统构成,其中,底座用于整体支撑,艾灸作业执行机构与智能机械手臂连接,用于艾灸条的夹持、旋转等操作,艾灸辅助盒子给进机构与智能机械手臂连接,而艾灸辅助盒子与艾灸辅助盒子给进机构连接,在艾灸辅助盒子给进机构的驱动下,艾灸辅助盒子可以实现位置的调整与艾灸作业执行机构进行配合,完成艾灸以及削灰等操作,通过控制器对智能机械手臂、距离传感器以及视觉传感器的信号采集,进而控制智能机械手臂与艾灸辅助盒子配合,以最大程度保持与传统手持灸工艺的一致性,再现传统中医艾条灸特色,很好地解决现有机器人方案不能保留传统中医艾条灸特色的问题。
本发明提供的智能家用艾灸机器人,结构新颖,功能完善,操作方便,可以代替艾灸医师的手工艾灸,解放医师的长时间手持艾灸条作业的辛苦和烟熏,为广大患者增加治疗和保健机会,在家里就可进行艾灸,无需在医院排队。具有保留传统特色、不丢古法工艺、与人工医师水平一致等优点,极具应用价值。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明的公开。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
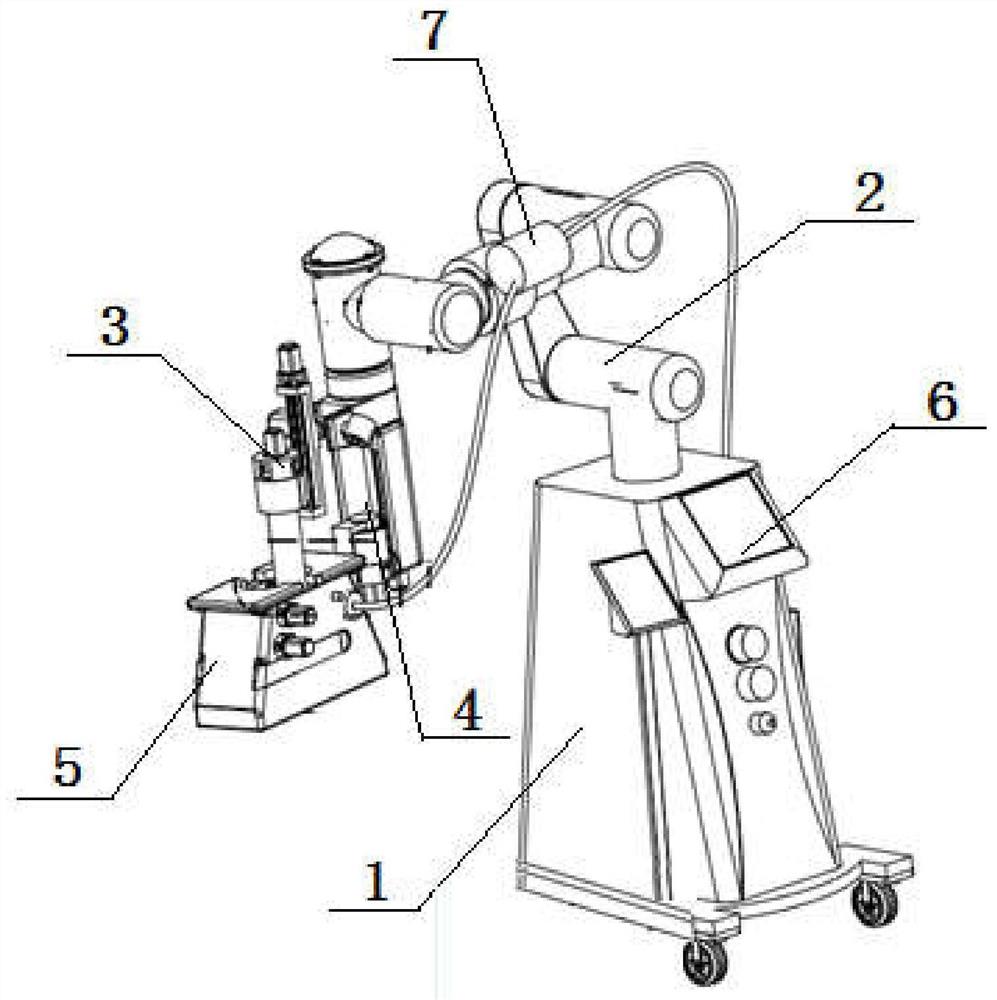
图1为本发明公开实施例提供的一种智能家用艾灸机器人的结构示意图1;
图2为本发明公开实施例提供的一种智能家用艾灸机器人中艾灸辅助盒子的结构示意图;
图3为本发明公开实施例提供的一种智能家用艾灸机器人的结构示意图2;
图4为本发明公开实施例提供的一种智能家用艾灸机器人中艾灸条给进滑台机构的结构示意图;
图5为本发明公开实施例提供的一种智能家用艾灸机器人中艾条夹持装置的结构示意图;
图6为本发明公开实施例提供的一种智能家用艾灸机器人中艾灸辅助盒子给进机构的结构示意图;
图7为本发明公开实施例提供的一种智能家用艾灸机器人的操作流程图。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置的例子。
为了真正高度还原手持灸的过程,确保艾灸效果,本实施方案提供了一种智能家用艾灸机器人,参见图1,该艾灸机器人主要由底座1、智能机械手臂2、艾灸作业执行机构3、艾灸辅助盒子给进机构4、艾灸辅助盒子5、控制器6以及排烟系统7构成,其中,底座1用于艾灸机器人的整体支撑,智能机械手臂2具有固定端和自由端,该智能机械手臂2的固定端与底座1固定连接,艾灸作业执行机构3和艾灸辅助盒子给进机构4均与智能机械手臂2的自由端连接,而艾灸辅助盒子5与艾灸辅助盒子给进机构4连接,控制器6分别与智能机械手臂2、艾灸作业执行机构3以及艾灸辅助盒子给进机构4通讯连接,控制器6依据智能机械手臂2以及艾灸作业执行机构3的输入信号,分别进行智能机械手臂2、艾灸作业执行机构3以及艾灸辅助盒子给进机构4的动作控制,其中,智能机械手臂2可实现艾灸轨迹的调整,艾灸作业执行机构3用于艾灸条的夹持以及艾灸条的角度以及高度的小范围调整,艾灸辅助盒子给进机构4用于进行艾灸辅助盒子5的位置调整,以与艾灸作业执行机构3进行适配。通过控制器6对智能机械手臂2和艾灸作业执行机构3的控制,可以按照回旋灸、往返灸、雀啄灸、定位灸等不同传统古法艾灸作业模式进行艾灸。
其中,智能机械手臂2采用现有的成熟机械手臂技术,由于智能机械手臂2的操作及移动过程相对复杂,因此,在实际使用时,智能机械手臂2采用六轴机械手臂,在控制器6中安装有对应的控制系统,关于智能机械手臂2的结构和控制方法均采用现有的成熟技术,可市购,不属于本方案的创新之处,因此,在此就不再对智能机械手臂2的具体结构及组成部件进行赘述。
参见图1,艾灸作业执行机构3主要由艾灸条给进滑台机构31、角度调节电机32、艾条夹持装置33、距离传感器以及视觉传感器构成,其中,角度调节电机32与智能机械手臂2的自由端连接,艾灸条给进滑台机构31与智能机械手臂2的自由端转动连接,且艾灸条给进滑台机构31与角度调节电机32的输出轴驱动连接,该艾灸条给进滑台机构31在角度调节电机32的驱动下,可相对智能机械手臂2进行角度调节,艾条夹持装置33与艾灸条给进滑台机构31连接,用于进行艾灸条的夹持,且艾条夹持装置33可相对艾灸条给进滑台机构31进行上下移动,距离传感器用于检测艾条夹持装置33相对患者的距离,视觉传感器用于检测艾条夹持装置33夹持的艾灸条的点燃端相对患者的位置。
上述距离传感器的输出端、视觉传感器的输出端均与控制器6的输入端连接,而控制器6的输出端分别与角度调节电机32的控制端以及第一给进驱动电机313的控制端连接。
上述艾灸作业执行机构3在实际工作时,由艾条夹持装置33进行艾灸条的夹持,通过控制器6控制角度调节电机32运动,以实现艾条夹持装置33相对智能机械手臂2的角度控制,进而根据需要实现艾灸条相对患者的角度调节,通过控制器6控制艾灸条给进滑台机构31可实现艾条夹持装置33相对艾灸条给进滑台机构31的给进距离调整,进而确保在艾灸燃烧的过程中,艾灸条的点燃端与人体始终保持要求的距离,确保艾灸效果。其中,由于每根艾灸条的长度是固定的,因此,在控制器6中会根据医学要求,计算出艾条夹持装置33距离患者的距离,通过距离传感器检测该艾条夹持装置33是否在规定位置处,如果不在,由控制器6控制艾灸条给进滑台机构31给进或者回退,直至艾条夹持装置33位于规定的距离点,而当艾灸条点燃后,控制器6按照预先依据经验计算的艾灸条燃烧速度,对应控制艾灸条给进滑台机构31进行给进,以确保艾灸条的点燃端距离患者在医学要求的范围内,而视觉传感器可进行艾灸条和患者穴位的图像采集,采集的图像回传到控制器6,控制器6可以及接收的图像进行进一步的控制和调节。
在实际使用时,为了实现变速的目的,可在角度调节电机32的输出轴上连接减速机进行电机输出转速的调节,此时,艾灸条给进滑台机构31是与减速机的输出轴进行驱动连接的。
参见图1,艾灸辅助盒子给进机构4位于艾灸作业执行机构3的一侧,与智能机械手臂2的自由端固定连接,艾灸辅助盒子5与艾灸辅助盒子给进机构4连接,且艾灸辅助盒子5可相对艾灸辅助盒子给进机构4进行旋转以及上下移动。
参见图2,艾灸辅助盒子5主要由壳体51、两个滑动封盖52、封盖驱动装置53以及削灰刀片54构成,其中,壳体51的上端敞口,下端底面为防烫网,两个滑动封盖52分别滑动扣装在壳体51的上端敞口处,封盖驱动装置53设置在壳体51内,且分别与两个滑动封盖52驱动连接,削灰刀片54设置在壳体51内,且与壳体51的内壁固定连接,控制器6的输出端与封盖驱动装置53的控制端连接。
上述艾灸辅助盒子5的具体工作原理为:由控制器6控制封盖驱动装置53进行运动,进而带动两个滑动封盖52相向或反向运动,实现壳体51的上端敞口关闭/开启,该艾灸机器人在作业时,由艾条夹持装置33夹持的艾条位于艾灸辅助盒子5内,通过将壳体设计为防烫网的形式,一方面可以使艾灸燃烧的烟气作用在人体皮肤处,实现艾灸的目的,另一方面可以接住掉落的艾灸灰,防止烫伤人体。壳体51中的削灰刀片54主要用于削灰,在削灰操作时,削灰刀片54的位置是固定固定不变的,主要依靠艾条夹持装置33的上下移动以及转动实现其削灰的目的。
参见图3,排烟系统7主要由前端排烟管71、过滤器72、后端排烟管73以及抽吸动力箱74构成,其中,前端排烟管71的进烟端与壳体51上的排烟口连接,过滤器72的进烟端与前端排烟管71的出烟端连接,后端排烟管73的进烟端与过滤器72的出烟端连接,抽吸动力箱74的进烟端与后端排烟管73的出烟端连接,而抽吸动力箱74的控制端与控制器6的输出端连接。
上述排烟系统7主要是用于艾灸辅助盒子5的排烟和排灰,该排烟系统7工作时,通过控制器6控制抽吸动力箱74启动,启动后,抽吸动力箱74向外部吸动气流,此时,艾灸条燃烧的烟灰会从壳体51上的排烟口排出经由前端排烟管71进入到过滤器72中进行过滤后,再进入到后端排烟管73中,最后进入到抽吸动力箱74中,完成排烟灰的过程。其中,抽吸动力箱74可以由收集箱、抽吸动力真空泵构成,其中,抽吸动力真空泵与收集箱相连,且抽吸动力真空泵位于收集箱的外部,抽吸的烟灰最终落入到收集箱内。
对于艾灸作业执行机构3在进行艾灸作业时,为了提高进一步提高安全性,避免出现由于艾灸条给进滑台机构31过度给进,导致点燃的艾灸条端部距离患者端部太近,发生烫伤患者的事故,作为技术方案的改进,还可在该艾灸作业执行机构3中设置红外温度传感器,该红外温度传感器用于检测患者艾灸处的表面皮肤温度,且红外温度传感器的输出端与控制器6的输入端连接;此时,在控制器6预存有温度的阈值,而红外温度传感器用来实时检测检测患者艾灸处的表面皮肤温度,一旦检测的温度超过阈值时,控制器6会即可控制智能机械手臂2上抬后,停机,避免意外的发生。
参见图4,为本实施方案提供的一种具体艾灸条给进滑台机构31的结构示意图,但并不限于图中所示的结构,该艾灸条给进滑台机构31主要由第一给进滑台底座311、第一给进丝杠312、第一给进驱动电机313以及两个第一给进导向杆314构成,其中,第一给进滑台底座311的两端分别设置有垂直向外延伸的第一定位板3111和第二定位板3112,且在第一定位板3111上设置有第一安装孔31111,在第二定位板3112上设置有限位槽,且限位槽的位置与第一安装孔31111的位置相对,第一给进丝杠312的两端分别转动设置在第一定位板3111的第一安装孔31111以及第二定位板3112的限位槽内,两个第一给进导向杆314分别位于第一给进丝杠312的两侧,且每个第一给进导向杆314的两端均分别与第一定位板3111和第二定位板3112固定连接,第一给进驱动电机313与第一定位板3111固定连接,且第一给进驱动电机313的输出轴与第一给进丝杠312驱动连接,为了方便第一给进驱动电机313与第一定位板3111之间的连接,作为方案的改进,可设计有第一电机架315,该第一给进驱动电机313通过第一电机架315与第一定位板3111进行固定连接。
参见图5,为与上述艾灸条给进滑台机构31配合使用的艾条夹持装置33,该艾条夹持装置33主要由基座331、连接块332、艾条插座333以及第一旋转电机334构成,其中,基座331由定子3311、轴承3312以及转子3313构成,定子3311内部设置有安装腔体,轴承3312的外套与定子3311的安装腔体内壁固定连接,转子3313的外壁与轴承3312的内套固定连接,连接块332的中部设置有螺孔,在螺孔的两侧设置有安装孔,连接块332通过螺孔螺纹套装在艾灸条给进滑台机构31中第一给进丝杠312的外部,连接块332通过两个安装孔滑动套装在两个第一给进导向杆314的外部,且连接块332的侧壁与基座331中的定子3311固定连接,艾条插座333位于基座331内,与转子3313驱动连接,第一旋转电机334的输出端与基座331中的转子3313驱动连接,第一旋转电机334的控制端与控制器6的输出端连接。
为了方便第一旋转电机334的位置固定,在该艾条夹持装置33中还可设置有旋转电机机架335,旋转电机434通过旋转电机机架435与基座431进行位置固定。
上述艾灸条给进滑台机构31与艾条夹持装置33的配合过程如下:由于艾条夹持装置33中的连接块332通过螺孔螺纹套装在第一给进丝杠312的外部,且同时通过两个通孔滑动套装在两个第一给进导向杆314的外部,当控制器6控制艾灸条给进滑台机构31中的第一给进驱动电机313进行转动时,第一给进驱动电机313会驱动第一给进丝杠312进行转动时,连接块332在两个第一给进导向杆314的限位下,仅可沿着第一给进丝杠312以及两个第一给进导向杆314上下移动,进行给进和回退动作,进而带动艾条夹持装置33整体进行给进和回退动作。
而对于上述艾条夹持装置33的结构设计不仅可以实现艾灸条的夹持,而且还可以实现艾灸条在该艾条夹持装置33中的旋转动作,具体而言,作业时,艾灸条B的尾部插设在艾条插座333内,实现对于艾灸条的位置固定,当需要进行艾灸条的旋转时,通过控制器6控制第一旋转电机334进行旋转,进而驱动基座331中的转子3313进行转动,由于艾条插座333与转子3313驱动连接,因此,艾条插座333也随之旋转,进而带动艾灸条进行旋转,该旋转动作一方面可以根据旋转的艾灸模式不同,在艾灸过程中旋转,以达到艾灸效果,另一方面在对艾灸条进行点燃端削灰时,通过上述的旋转动作,可将艾灸条一周的燃灰进行切削。
参见图6,上述艾灸辅助盒子给进机构4主要由第二给进滑台底座41、第二给进丝杠42、第二给进驱动电机43、两个第二给进导向杆44、旋转托台45、旋转支架46以及第二旋转电机47构成,其中,第二给进滑台底座41的两端分别设置有垂直向外延伸的第三定位板和第四定位板,在第三定位板上设置有安装孔,在第四定位板上设置有限位槽,且限位槽的位置与所述安装孔的位置相对,第二给进丝杠42的两端分别转动设置在第三定位板的安装孔以及第四定位板的限位槽内,第二给进驱动电机43与第三定位板固定连接,为了方便第二给进驱动电机43的固定可通过第三电机支架48与第三固定板进行连接,且第二给进驱动电机43的输出轴与第二给进丝杠42驱动连接,两个第二给进导向杆44分别位于第二给进丝杠42的两侧,且每个第二给进导向杆44的两端均分别与第三定位板和第四定位板固定连接,旋转托台45上端敞口,内部设置有安装腔,在旋转托台45的一侧设置有连接块,连接块上设置贯通上下两端的螺孔,在螺孔的两侧设置有贯通上下两端的通孔,旋转托台45通过连接块上的螺孔螺纹套装在第二给进丝杠42的外部,两侧的通孔滑动套装在邻近的第二给进导向杆44的外部,旋转支架46一端通过轴承嵌套安装在旋转托台45的安装腔内,旋转支架46的另一端与艾灸辅助盒子5的壳体51固定连接,第二旋转电机47与旋转托台45固定连接,且第二旋转电机47的输出轴与旋转支架46驱动连接,其中,第二给进驱动电机43的控制端和第二旋转电机47的控制端均与控制器6的输出端连接。
上述艾灸辅助盒子给进机构4可以实现两方面的工作,一方面可以驱动艾灸辅助盒子5进行上下移动,另一方面可以驱动艾灸辅助盒子5进行旋转。具体而言,上下移动主要是通过控制器6控制第二给进驱动电机43进行旋转,带动第二给进丝杠42转动,通过两个给进导向杆44对旋转托台45上的连接块进行限位,由于连接块与第二给进丝杠42通过螺纹连接,因此,在第二给进丝杠42转动的同时会带动连接块及其旋转托台45进行上下移动,进而带动旋转支架46以及与其连接的艾灸辅助盒子5同步进行上下移动;旋转主要是通过控制器6控制第二旋转电机47进行旋转,进而带动旋转支架46相对旋转托台45进行转动,进而带动与其连接的艾灸辅助盒子5同步旋转。
参见图2,上述艾灸辅助盒子5中的封盖驱动装置53主要由封盖驱动电机、主动齿轮532、从动齿轮533、反向齿轮534以及传动带535构成,其中,封盖驱动电机与壳体51的内壁固定连接,主动齿轮532固定套装在封盖驱动电机的输出轴外部,与一个滑动封盖52驱动啮合,从动齿轮533与反向齿轮534驱动啮合,且反向齿轮534同时与另一个所述滑动封盖52驱动啮合,传动带535将主动齿轮532和从动齿轮533传动连接,封盖驱动电机的控制端与控制器6的输出端连接。配合上述封盖驱动装置53的结构,滑动封盖52的下表面设计为齿条结构。
上述封盖驱动装置53的具体工作原理为:通过控制器6控制封盖驱动电机转动,带动主动齿轮532转动,通过传动带535进行传动,驱动从动齿轮533转动,通过反向齿轮534进行反向后,可实现在封盖驱动电机的驱动下,两个滑动封盖52可实现相向或者反向运动,实现滑动封盖52的开启/关闭。
作为技术方案的改进,参见图2,在艾灸辅助盒子5中还设置有排气板55以及排气驱动电机,其中,在壳体51的侧壁上设置有排气口511,排气板55的大小与排气口511的大小适配,且排气板55滑动设置在排气口511处,排气驱动电机的输出轴套装有驱动齿轮561,排气板55的上缘为齿条结构设计,驱动齿轮561与排气板55驱动啮合,且排气驱动电机的控制端与所述控制器6的输出端连接。
通过在壳体51上设置排气口511可以实现壳体51内的气体排出,当需要排气或者关闭排气口时,可通过控制器6控制排气驱动电机转动,带动排气板55运动,开启/关闭排气口。
参见图7为一种智能家用艾灸机器人的操作流程,主要用于辅助解释说明该智能家用艾灸机器人的一种使用方法。
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
应当理解的是,本发明并不局限于上面已经描述的内容,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
- 一种智能家用艾灸机器人
- 一种新型家用智能艾灸仪