一种无人机电池替换装置和无人机机巢
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及无人机技术领域,具体涉及一种无人机电池替换装置和无人机机巢。
背景技术
随着无线通信技术、航空遥感测绘技术、GPS导航定位技术及自动控制技术的发展,无人机发展迅速,广泛应用于基础建设规划、线路巡查、应急响应、地形测量等多个领域。为了保障无人机连续作业,便有了给无人机更换电池的装置。目前每次更换无人机的电池时,无人机必须断电重新开机,操作复杂且无人机开关机自检过程耗时长。
发明内容
本发明的目的在于克服现有技术中的缺点与不足,提供一种无人机电池替换装置和无人机机巢。
本发明的一个实施例提供一种无人机电池替换装置,包括:支座、设置在所述支座上的第一导向件和第二导向件、活动设置在所述第一导向件上的电池存储座、活动设置在所述第二导向件的电池推送机构以及驱动所述电池存储座和所述电池推送机构移动的驱动机构;
所述电池存储座上设置有至少两个电池存放槽和至少两个电池回收槽,所述电池存放槽和所述电池回收槽沿所述第一导向件的导向方向并排布置;
所述电池推送机构包括活动设置在所述第二导向件的支架和两个锁定机构,所述支架的两侧设置有延伸部,所述延伸部朝背离所述支架底部或顶部的方向延伸,两个所述延伸部之间形成一避让空间,所述锁定机构设置在所述延伸部上,用于锁定无人机电池。
相对于现有技术,本发明的无人机电池替换装置通过对双电池无人机上两块电池分别单独更换,使得无人机无需断电而持续工作,能够省略无人机多次开关机自检的时间,提升作业效率。
进一步,所述锁定机构包括两个锁扣和动力组件,所述锁扣与所述支架转动连接,所述锁扣转动后,两个所述锁扣之间形成一用于锁定无人机电池的空间,所述动力组件驱动所述锁扣转动。两个锁扣稳定卡住无人机电池的两端,便于稳定推送无人机电池。
进一步,所述电池存储座上设置有两个所述电池存放槽和两个所述电池回收槽,所述电池存放槽位于两个所述电池回收槽之间。减少电池存储座移动的距离,增加工作效率。
进一步,所述第一导向件的导向方向与所述第二导向件的导向方向相互垂直。
进一步,所述支座上设置有若干定位块,所述定位块用于与无人机上的凹槽卡合。所述定位块保持支座和无人机相互之间的位置,避免无人机电池在被推送时发生偏移。
进一步,所述支座上设置有若干缓冲机构,所述缓冲机构包括连杆和弹性件,所述连杆与所述支座转动连接,所述弹性件两端分别与所述支座和所述连杆连接,并位于所述连杆的转动路径上;
所述定位块设置在所述连杆上。缓冲机构避免支座和无人机相互靠近时,定位块刮擦无人机。
进一步,所述支座包括底座、顶梁以及设置在所述底座和所述顶梁之间的支撑件,所述第一导向件在所述底座上,所述电池存储座位于所述底座和所述顶梁之间,所述第二导向件设置在所述顶梁上,所述支架的两侧设置有朝背离所述支架底部延伸的延伸部,两个所述延伸部之间形成一避让空间,所述锁定机构设置在所述延伸部上。
进一步,所述底座上形成有若干限位部,所述限位部均匀设置在所述第一导向件的两侧,用于限制所述电池存储座在偏离所述第一导向件的导向方向上移动。
进一步,所述顶梁上设置有两个所述定位块和位于所述定位块之间的压板,所述定位块用于与无人机上的凹槽卡合,所述压板与所述顶梁转动连接,用于抵压无人机的顶部。压板进一步避免支座和无人机相互之间位置的偏移。
本发明的另一个实施例提供一种无人机机巢,包括:机巢本体、设置在所述机巢本体内的停机平台、如上述所述的无人机电池替换装置以及驱动所述支座移动的平移驱动装置。
为了能更清晰的理解本发明,以下将结合附图说明阐述本发明的具体实施方式。
附图说明
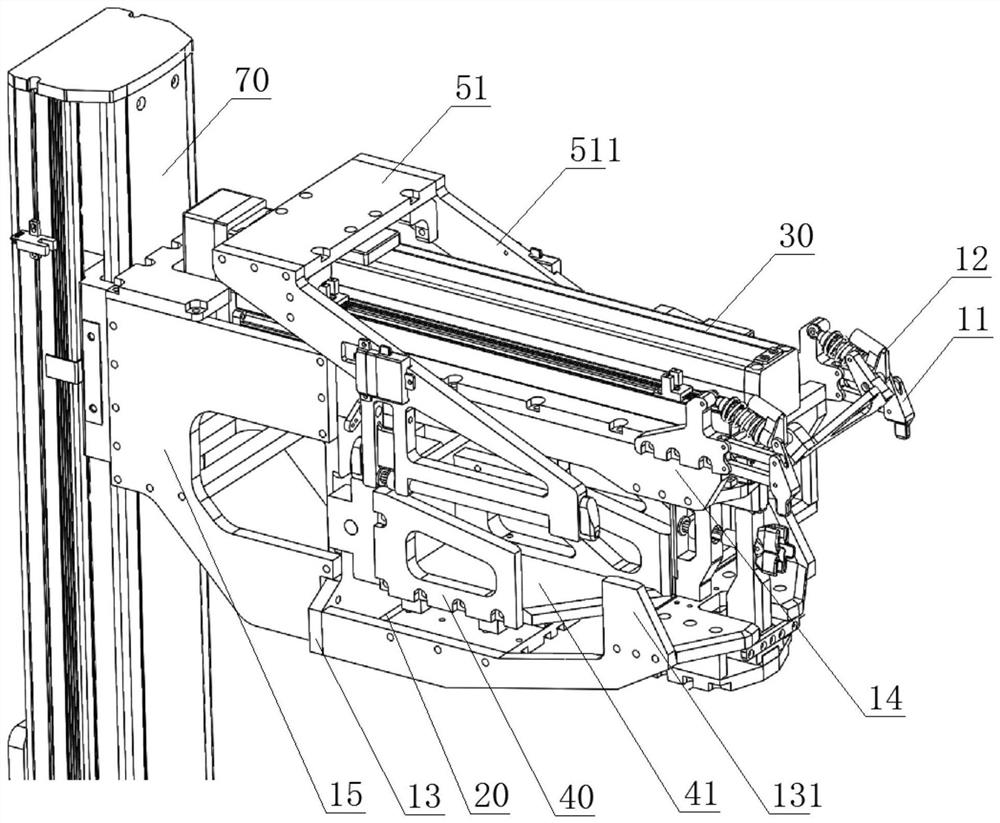
图1为本发明一个实施例的无人机电池替换装置的结构示意图;
图2为图1所示的无人机电池替换装置在更换电池时的过程图;
图3为图1所示的无人机电池替换装置的锁定机构的结构示意图;
图4为图1所示的无人机电池替换装置的定位块和缓冲机构的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,其是本发明一个实施例的无人机电池替换装置的结构示意图,该无人机电池替换装置,包括:支座10、设置在所述支座10上的第一导向件20和第二导向件30、活动设置在所述第一导向件20上的电池存储座40、活动设置在所述第二导向件30的电池推送机构以及驱动所述电池存储座40和所述电池推送机构移动的驱动机构。
所述电池存储座40上设置有至少两个电池存放槽41和至少两个电池回收槽42,所述电池存放槽41和所述电池回收槽42沿所述第一导向件20的导向方向并排布置;所述电池推送机构包括活动设置在所述第二导向件30的支架51和两个锁定机构,所述支架51的两侧设置有延伸部511,所述延伸部511朝背离所述支架51底部或顶部的方向延伸,两个所述延伸部511之间形成一避让空间,所述锁定机构设置在所述延伸部511上,用于锁定无人机电池61。请参阅图2,其是图1所示的无人机电池替换装置在更换电池时的过程图,所述无人机电池替换装置更换无人机电池61时,先通过电池推送机构将无人机60一侧的无人机电池61回收至电池回收槽42后,再将电池存放槽41内的无人机电池61推送到无人机60上,接着再替换无人机60另一侧的无人机电池61,从而实现无人机60不断电而更换电池。
需要说明的是,所述驱动机构具体结构可以根据实际需要来设计,例如,所述驱动机构可以为丝杆驱动机构、旋转电机平移驱动机构、皮带平移机构、气缸平移驱动机构或直线电机平移驱动机构。旋转电机平移驱动机构、皮带平移机构、气缸平移驱动机构或直线电机平移驱动机构的工作原理与上文论述相同,在此不再详细赘述。另外,支座10可以固定也可设置成可移动的,通过支座10靠近无人机60或推动无人机60来靠近支座10,从而进行换电。
请参阅图3,其是图1所示的无人机电池替换装置的锁定机构的结构示意图。在一些可选的实施方式中,所述锁定机构包括两个锁扣52和动力组件,所述锁扣52与所述支架51转动连接,所述锁扣52转动后,两个所述锁扣52之间形成一用于锁定无人机电池61的空间,所述动力组件驱动所述锁扣52转动。电池推送机构在靠近无人机电池61后,锁扣52转动,从而抵接在电池的侧面,然后电池推送机构再移动将无人机电池61推送走,在本实施例中,两个锁扣52通过转轴相互连接,动力组件通过驱动转动转动来同时驱动锁扣52转动,当然,也可分别驱动单个锁扣52转动。需要说明的是,锁定机构可根据实际需要来选择合适的设计,例如锁定机构可通过真空吸盘来吸住电池,或者通过夹持机构来抓住锁定电池,不限此例。
在一些可选的实施方式中,所述电池存储座40上设置有两个所述电池存放槽41和两个所述电池回收槽42,所述电池存放槽41位于两个所述电池回收槽42之间。预设电池存放槽41和电池回收槽42沿着第一导向件20的方向依序为A槽、B槽、C槽、D槽,电池存放槽41为B槽、C槽,A槽、D槽为电池回收槽42,所述无人机电池替换装置更换无人机电池61时,先移动电池存储座40使得A槽和无人机60第一侧的电池槽对准,通过电池推送机构将无人机电池61推送到A槽,然后电池存储座40移动使得B槽对准无人机60第一侧的电池槽,并将B槽中满电的无人机电池61推送至电池槽内,然后电池存储座40移动使得D槽对准无人机60第二侧的电池槽,并将无人机电池61推送至D槽,然后电池存储座40移动使得C槽对准无人机60第二侧的电池槽,并将C槽中满电的无人机电池61推送至电池槽内。当然,根据实际需要也可以增加所述电池存放槽41和所述电池回收槽42的数量,另外,所述电池存放槽41和所述电池回收槽42的设置顺序也可根据实际需要进行改变。
在一些可选的实施方式中,所述第一导向件20的导向方向与所述第二导向件30的导向方向相互垂直。当然,根据实际无人机60的结构,所述第一导向件20的导向方向与所述第二导向件30的导向方向也可呈锐角。
请参阅图4,其是图1所示的无人机电池替换装置的定位块和缓冲机构的结构示意图。在一些可选的实施方式中,所述支座10上设置有若干定位块11,所述定位块11用于与无人机60上的凹槽卡合。无人机60上设置有凹槽,定位块11可以与无人机60上的凹槽相互卡合,从而进行支座10的定位。
在一些可选的实施方式中,所述支座10上设置有若干缓冲机构12,所述缓冲机构12包括连杆121和弹性件122,所述连杆121与所述支座10转动连接,所述弹性件122两端分别与所述支座10和所述连杆121连接,并位于所述连杆121的转动路径上;所述定位块11设置在所述连杆121上。由于支座10移动和无人机60相互靠近时。定位块11可能碰撞到凹槽附近的无人机60外壁,连杆121可以引导定位块11转动,然后当定位块11移动到凹槽时,弹性件122将连杆121复位,使得定位块11进入凹槽,弹性件122还起到将定位块11保持在凹槽内的作用。需要说明的是,弹性件122可根据实际需要来选择,例如弹簧等。
在一些可选的实施方式中,所述支座10包括底座13、顶梁14以及设置在所述底座13和所述顶梁14之间的支撑件15,所述第一导向件20在所述底座13上,所述电池存储座40位于所述底座13和所述顶梁14之间,所述第二导向件30设置在所述顶梁14上,所述支架51的两侧设置有朝背离所述支架51底部延伸的延伸部511,两个所述延伸部511之间形成一避让空间,所述锁定机构设置在所述延伸部511上。该设计使得整体结构更加紧凑和稳定。
在一些可选的实施方式中,所述底座13上形成有若干限位部131,所述限位部131均匀设置在所述第一导向件20的两侧,用于限制所述电池存储座40在偏离所述第一导向件20的导向方向上移动,限位部131可选择地抵接电池存储座40。
在一些可选的实施方式中,所述顶梁14上设置有两个所述定位块11和位于所述定位块11之间的压板16,所述定位块11用于与无人机60上的凹槽卡合,所述压板16与所述顶梁14转动连接,用于抵压无人机60的顶部。需要说明的是,压板16也可与定位块11转动连接,当设置有缓冲机构12时,压板16也可与连杆121转动连接。
相对于现有技术,本发明的无人机电池替换装置通过对双电池无人机上两块电池分别单独更换,使得无人机无需断电而持续工作,能够省略无人机多次开关机自检的时间,提升作业效率。
上述所述的无人机电池替换装置可应用在无人机机巢上,该无人机机巢,包括:机巢本体、设置在所述机巢本体内的停机平台、如上述所述的无人机电池替换装置以及驱动所述支座10移动的平移驱动装置70。
需要说明的是,所述平移驱动装置70具体结构可以根据实际需要来设计,例如,平移驱动装置70可以为丝杆驱动装置、旋转电机平移驱动装置、皮带平移装置、气缸平移驱动装置或直线电机平移驱动装置,不限此例。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种无人机电池替换装置和无人机机巢
- 一种无人机固定复位装置和无人机机巢