一种满足电气连接的小型空中阵列对接和分离机构及方法
文献发布时间:2023-06-19 10:05:17
技术领域
本发明属于空间对接技术领域,具体涉及一种满足电气连接的小型空中阵列对接和分离机构及方法。
背景技术
无人机空中对接的发展和应用引起了各国的高度重视,人们对无人机的空中航时,无人机间信息传递以及无人机的载荷,作业单元的模块化设计提出了更高的要求。一种能够同时保证两架无人机对接时的电气连接以及结构连接的对接/分离机构,能够保证无人机之间信息传递的可靠性以及空中阵列组装飞行的结构稳定性;能够将无人机系统的功能对象设计模块化,使得无人机系统的造价降低,储存空间减小。极大的丰富了无人机系统的适装性以及应用可能性。
传统的空中对接机构大多应用于空中加油系统,主动对接系统(载油机)对接被动对接系统(受油机),通过导引型面引导主动对接头深入对接口,之后完成对接锁紧动作。这种机构要求对接机构具有较长的轴向距离,对接动作不连续,对接位置不够精确,通过导引面的导引进行对接位置的调整具有碰撞的干扰,且无法实现电气连接。
基于电磁的对接机构,主动对接系统与从动对接系统通过电磁力进行位置的精确对准,然后通过旋转驱动或者对接爪进行机构的抓取锁紧。这种机构要求对接机构具有足够的轴向距离供旋转驱动机构进行旋进锁紧,且由于螺纹螺杆的螺纹起点不确定性,系统的对接性能较差。
基于对接钩的对接机构,通过两个对接面贴合碰撞,然后对接钩锁紧对接面。同样,电气连接在对接面结构连接保证之后,进行电气连接动作的进行。这种机构由于不具有导引动作,很难满足空中对接的需要,而且电气连接动作与结构连接动作不连续,容易造成连接动作的相互干扰。
此外,基于上述的机构方案所设计的空中无人机对接系统大多占用空间较大,机构连接刚性较差,机构间间隙较大,导致无人机之间会由于相对速度产生松动碰撞。不具备小空间、高刚性、可靠电气连接的工作能力。
发明内容
本发明旨在于克服上述现有技术的不足,提供一种侧重于电气连接、空间占用小、具备可靠导引面、活动间隙小的一种满足电气连接的小型空中阵列对接和分离机构及方法。
为实现以上目的,本发明的目的是这样实现,一种满足电气连接的小型空中阵列对接和分离机构,包括被动对接机构1和主动对接机构2,被动对接机构1和主动对接机构2活动连接,其特征是:被动对接机构至少包括:电气母头101、母丝杠102、被动对接丝杠滑块103、被动对接缓冲垫104、被动对接滑块105、被动对接限位环106、限位条107、导引面108、被动舵机109、被动对接主动齿轮110、被动对接从动齿轮111、被动机构外壳112;电气母头101内嵌于母丝杠102内部,母丝杠102与被动对接从动齿轮111固连,通过被动对接主动齿轮110传递主动对接被动舵机109的转动带动被动对接丝杠滑块103进行轴向移动,被动对接限位环106约束被动对接滑块105的轴向运动长度;被动对接丝杠滑块103的轴向移动带动被动对接滑块105的运动以及限位条107与导引面108产生向内的运动;被动机构外壳112作为机构结构基础,主动对接被动舵机109安装在外壳底部专用的舵机安装口;被动对接主动齿轮110与被动对接从动齿轮111除了分别与其主从零件相连接外,还通过外壳上特有的凸出特征进行锁定;母丝杠102与从动齿轮110固连;限位条107通过螺纹连接在对接滑块10上;导引面108安装在对接面上,引导主动对接机构钩爪207;电气母头101、母丝杠102、被动对接丝杠滑块103、被动对接缓冲垫104和被动对接滑块105按照大小采用嵌入连接。
所述的被动对接机构1由电气母头101、母丝杠102、被动对接丝杠滑块103、被动对接缓冲垫104、被动对接滑块105、被动对接限位环106、限位条107、导引面108、主动对接被动舵机109、被动对接主动齿轮110、被动对接从动齿轮111、被动机构外壳112所构成。电气母头101内嵌于母丝杠102内部,并与孔间隙配合保证连接的稳固性,母丝杠102与被动对接从动齿轮111固连,通过被动对接主动齿轮110传递的被动舵机109的转动而转动,进而带动被动对接丝杠滑块103进行轴向移动,同时,被动对接限位环106约束被动对接滑块105的轴向运动长度;被动对接丝杠滑块103的轴向移动一方面带动被动对接滑块105的收缩/扩展运动,产生电气母头101相对于被动对接滑块105向前/向后的运动,另一方面带动限位条107与导引面108产生向内的收缩/扩展;限位条107与导引面108之间的间隙缩小/增大,用来对主动对接机构的钩爪207产生锁定/解锁作用。
被动对接机构所有零件全部主动或被动的与被动机构外壳112相连接,其中被动舵机109安装在外壳底部专用的舵机安装口,采用的标准SG90型号舵机驱动;被动对接主动齿轮110与被动对接从动齿轮111除了分别与其主从零件相连接外,还通过外壳上特有的凸出特征进行进一步位置锁定;母丝杠102与从动齿轮110进行结构上的固连;限位条107通过螺纹连接在被动对接滑块105的四个对应位置;导引面108则安装在对接面上,起到引导主动对接机构钩爪207的作用;电气母头101、母丝杠102、被动对接丝杠滑块103、被动对接缓冲垫104和被动对接滑块105按照大小采用嵌入连接。
所述的主动对接机构2由电气公头201、公丝杠202、主动对接丝杠滑块203、主动对接缓冲垫204、主动对接滑块205、主动对接限位环206、钩爪207、钩爪连杆208、被动对接主动舵机209、主动对接主动齿轮210、主动对接从动齿轮211、主动机构外壳212所构成。电气公头201内嵌于公丝杠202内部,与孔间隙配合保证连接的稳固性,公丝杠202与主动对接从动齿轮211固连,通过主动对接主动齿轮210传递的被动对接主动舵机209的转动,进而带动主动对接丝杠滑块203进行轴向移动,同时,主动对接限位环206约束主动对接滑块205的轴向运动长度;主动对接丝杠滑块203的轴向移动一方面带动主动对接滑块205的收缩/扩展运动,产生电气公头201相对于主动对接滑块205向前/向后的运动,另一方面带动钩爪207与钩爪连杆208产生向内的收缩抓取/扩展释放动作;实现主动对接机构对被动对接机构的锁定/解锁作用。
主动对接机构所有零件全部主动或被动的与主动机构外壳212相连接,其中被动对接主动舵机209安装在外壳底部专用的舵机安装口,采用的标准SG90型号舵机驱动;主动对接主动齿轮210与主动对接从动齿轮211除了分别与其主从零件相连接外,还通过外壳上特有的凸出特征进行进一步位置锁定;公丝杠202与从动齿轮210进行结构上的固连;钩爪207通过螺纹连接在主动对接滑块205的四个对应位置;钩爪连杆208则安装在主动机构外壳212对应螺纹口上,起到引导主动对接机构钩爪207的作用;电气公头201、公丝杠202、主动对接丝杠滑块203、主动对接缓冲垫204和主动对接滑块205按照大小采用嵌入连接。
一种满足电气连接的小型空中阵列对接和分离机构及方法包括:引导阶段:主动对接无人机发送对接信号,此时主动对接机构2的被动对接主动舵机209旋转,产生主动对接滑块205向前的轴向运动,进而带动钩爪207产生扩展动作,等待对接抓取过程;被动对接无人机收到对接信号,此时被动对接机构1的被动舵机109旋转,产生被动对接滑块105向前的轴向运动,进而带动限位条107同样向前运动,等待主动机构的抓取。
主动机构的抓取与锁定:主被动对接机构对接面不断靠近,此时在靠近到临界距离时,四个钩爪207会进入到导引面108的范围内,此时两个对接面继续靠近,然后通过导引面108的导引线进而使钩爪207滑进限位条107与导引面108的间隙内,此时通过两个对接机构的被动对接缓冲垫104/204起到对碰撞的缓冲,然后被动对接主动舵机209开始旋转,带动主动对接滑块205收缩运动,此时产生的相对运动使电气母头101与电气公头201对接,然后钩爪207收缩并嵌入进限位条107间隙内,完成对接机构的抓取与锁定,实现电气与结构的稳定对接。
被动机构的解锁与释放:被动机构1的被动舵机109开始转动,进而带动被动对接滑块105产生伸出动作,此时电气公头201与电气母头101的连接断开,然后主动对接机构被动对接主动舵机209旋转,进而带动主动对接滑块205产生伸出动作,此时钩爪207产生释放动作,并从限位条107与导引面108 的间隙内滑出,断开两个对接面的结构连接。
分离阶段:经过被动机构的解锁与释放阶段,此时两个无人机之间的电气与结构连接全部断开,接下来通过导引面108的限制,主被动无人机便可以彼此脱离。
与现有技术相比,本发明具有以下优点:
第一,本发明采用钩爪抓取结合导引面对主被动对接机构进行对接引导,实现对接机构的准确定位与稳定抓取,结构可靠且连接稳定,能够满足无人机空中对接过程中的姿态小扰动过程中的对接过程。
第二,本发明通过丝杠驱动对接滑块进行轴向的前后运动,进而产生电气连接头相对于对接滑块的相对前后运动,通过该运动可以实现公母电气对接头的连接与释放。
第三,本发明通过SG90舵机驱动整个对接过程,将对接过程的抓取动作与电气和结构连接的锁定动作进行协同控制,使得结构的控制变得极为简单,既保留了可靠性,又具有简易性。
第四,本发明所占空间较小,并且内部用于电气连接的孔径较大,相比于传统的对接机构,所占空间大小为37mm×80mm×80mm,而内部用于电气连接的孔径为30mm,大幅地提高了空间的利用率。
第五,本发明结构简单可靠,工艺简单,通过先实现结构连接,保证结构连接的可靠性的基础上实现电气连接,电气接头采用标准件,且适配多种常用电气接头,工作可靠性高,零件可替代性高。
附图说明
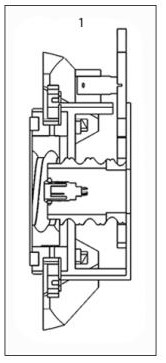
图1A为本发明实施例的被动对接结构第一种状态示意图,图1B是图1A的立体工作图;
图2A为本发明实施例的被动对接结构第二种状态示意图,图2B是图2A的立体工作图;
图3为本发明实施例的主动对接结构示意图;
图4为主动对接结构爆炸图;
图5A为本发明实例的电气与结构图;图5B为本发明实例的电气与结构连接示意图;
图6为钩爪锁紧结构局部图;
图7为对接/分离过程图(A-B-C为对接过程;C-B-A为分离过程)。
图中:1、被动对接机构:101、电气母头;102、母丝杠;103、被动对接丝杠滑块;104、被动对接缓冲垫;105、被动对接滑块;106、被动对接限位环;107、限位条;108、导引面;109、主动对接被动舵机;110、被动对接主动齿轮;111、被动对接从动齿轮;112、被动机构外壳;2、主动对接机构:201、电气公头;202、公丝杠;203、主动对接丝杠滑块;204、主动对接缓冲垫;205、主动对接滑块;206、主动对接限位环;207、钩爪;208、钩爪连杆;209、被动对接主动舵机;210、主动对接主动齿轮;211、主动对接从动齿轮;212、主动机构外壳。
具体实施方式
下面结合具体实例对本发明进行详细说明。以下说明有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
如图1A、图1B、图2A、图2B所示,一种满足电气连接的小型空中阵列对接和分离机构,包括被动对接机构1和主动对接机构2,被动对接机构1和主动对接机构2活动连接,被动对接机构至少包括:电气母头101、母丝杠102、被动对接丝杠滑块103、被动对接缓冲垫104、被动对接滑块105、被动对接限位环106、限位条107、导引面108、主动对接被动舵机109、被动对接主动齿轮110、被动对接从动齿轮111、被动机构外壳112;电气母头101内嵌于母丝杠102内部,母丝杠102与被动对接从动齿轮111固连,通过被动对接主动齿轮110传递主动对接被动舵机109的转动带动被动对接丝杠滑块103进行轴向移动,被动对接限位环106约束被动对接滑块105的轴向运动长度;被动对接丝杠滑块103的轴向移动带动被动对接滑块105的运动以及限位条107与导引面108产生向内的运动;被动机构外壳112作为机构结构基础,主动对接被动舵机109安装在外壳底部专用的舵机安装口;被动对接主动齿轮110与被动对接从动齿轮111除了分别与其主从零件相连接外,还通过外壳上特有的凸出特征进行锁定;母丝杠102与从动齿轮110固连;限位条107通过螺纹连接在对接滑块10上;导引面108安装在对接面上,引导主动对接机构钩爪207;电气母头101、母丝杠102、被动对接丝杠滑块103、被动对接缓冲垫104和被动对接滑块105按照大小采用嵌入连接。
如图3与图4所示,主动对接机构2至少包括:电气公头201、公丝杠202、主动对接丝杠滑块203、主动对接缓冲垫204、主动对接滑块205、主动对接限位环206、钩爪207、钩爪连杆208、被动对接主动舵机209、主动对接主动齿轮210、主动对接从动齿轮211、主动机构外壳212所构成;电气公头201内嵌于公丝杠202内部,公丝杠202与主动对接从动齿轮211固连,主动对接主动齿轮210传递的被动对接主动舵机209的转动,带动主动对接丝杠滑块203的轴向移动,主动对接限位环206约束主动对接滑块205的轴向运动长度;主动对接丝杠滑块203带动主动对接滑块205的运动,产生电气公头201相对于主动对接滑块205的运动,以及带动钩爪207与钩爪连杆208产生向内的动作;主动机构外壳212作为机构结构基础,被动对接主动舵机209安装在舵机安装口;主动对接主动齿轮210与主动对接从动齿轮211与其主从零件相连接,并通过外壳上特有的凸出特征进行锁定;公丝杠202与从动齿轮210固连;钩爪207连接在主动对接滑块205的对应位置;钩爪连杆208安装在主动机构外壳212上;电气公头201、公丝杠202、主动对接丝杠滑块203、主动对接缓冲垫204和主动对接滑块205按照大小采用嵌入连接。
如图5A、图5B所示,主动对接机构的钩爪207与钩爪连杆208与被动对接机构的限位条107与导引面108实现结构连接,通过电气母头101与电气公头201实现电气连接;主动对接机构的钩爪207一共有四个,分别布置在机构横截面的四角,呈直角分布;钩爪连杆208连接于钩爪207与主动机构外壳上,实现钩爪与外壳的连接并完成钩爪的抓取动作。被动对接机构的限位条107布置于被动机构横截面上与钩爪相对应的位置处,通过螺纹连接在被动机构外壳上,导引面108通过螺纹固连于被动对接面上,与运动的限位条107实现锁定间隙的大小控制;电气公头201与电气母头101通过相对于各自的对接滑块的运动实现电气连接的连接与断开,电气连接头采用标准7线电话线作为连接头,且内部用于电气连接的圆形截面直径为20mm,可以根据需求进行电气连接头的更换。
如图6所示,主动对接机构的钩爪207扣合于限位条107与导引面108之间的锁定间隙内实现,导引面的主要作用是作为对接与分离时引导钩爪207的运动轨迹,使其能够准确的滑落进入锁定间隙;钩爪207末端采用柔性材料设计,能够保证对接机构的轴向间隙具有一定的连接可靠性,同时横向的位置限定通过锁定间隙限制。对接机构的整体轴向位置限定通过四个钩爪207与四个限位条107实现,径向则通过八个锁定间隙与钩爪207接触面实现。
如图7所示,被动对接机构1和主动对接机构2对接/分离过程具备互换可逆性,A为两对接机构对接过程的开始阶段与分离过程的结束阶段,B为对接过程中引导阶段与分离过程的解锁释放阶段;C为对接过程的完成阶段与分离过程的初始状态。
对接过程中,通过图7A所示,两架无人机通过稳定控制使无人机大致处于对接轴线上,然后收到对接开始信号,此时两架无人机进入对接状态,主动对接无人机对接面不断靠近被动对接无人机被动面,此时凸出的四个钩爪207会首先进入导引面108的入口处,在导引面108的限制下,主动对接面不断靠近被动对接面,钩爪107沿着导引线滑落至限位条108与导引面108 形成的锁定间隙内,此时进入图7B的状态;然后通过距离传感器测出此时的距离,并进入抓取阶段:主动对接机构的钩爪207在被动对接主动舵机209的驱动下产生抓握动作,实现结构上的连接,同时,相对于主动对接滑块205/105,电气公头201与电气母头101产生相对于各自所述的对接滑块的伸出动作,两个电气连接头实现连接,从而实现电气连接,进入图7C状态。
分离过程中,如图7B所示:第一阶段为解锁释放阶段,此时被动对接机构被动舵机109最先作动,驱动被动对接滑块105伸出,此时电气母头101相对于被动对接滑块105产生收缩动作,实现电气连接的断开,然后主动对接机构被动对接主动舵机209作动,驱动主动对接滑块205伸出,此时钩爪207产生释放动作,从限位条107与导引面108之间的锁定间隙中分离,实现结构连接的断开;如图7C所示,第二阶段为分离阶段,此时两架无人机之间的电气连接与结构连接已断开,在导引面108与钩爪207的作用下,两架无人能够保持相对位置误差在一定的容许度内实现位置分离。
需要理解的是,本发明的术语“顺时针”、“逆时针”、“俯仰”、“偏航”、“垂直”、“水平”、“归零”等指示的方位或位置关系为基于附图所示方位或位置关系,仅是为了描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以上对本发明的具体实例进行了描述,本实例中没有详细叙述的属本行业的公知常用手段,这里不一一叙述。本发明不限于上述特定的实施方式,以上实例并不构成对本发明的保护范围的限制,凡是在本发明权利要求范围内的修改或变形均属于本发明的保护范围之内。
- 一种满足电气连接的小型空中阵列对接和分离机构及方法
- 一种满足伸缩要求的不锈钢天沟对接节点及其施工方法