一种交叉扑动滑翔飞行器
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及飞行器技术领域,具体指一种交叉扑动滑翔飞行器。
背景技术
飞行器的升力装置是一种基于空气动力学的机构,根据结构可以分为固定翼和旋翼,固定翼飞行器一般具有机身以及对称设置的固定翼,由推进器提供动力以获得较大的飞行速度和机动性。其飞行原理在于固定翼与空气之间存相对的速度,空气与固定翼的各面相互作用产生升力从而使飞机获得飞行能力。固定翼飞行器的缺陷在于不能在空中悬停,需要在跑道上滑行起飞或降落以及机场设施建设的支持。旋翼飞行器如直升机,特点在于起飞时无需跑道,可以在空中悬停,其动力系统包括发动机和旋翼,发动机驱动旋翼旋转产生向下的作用力,该作用力即升力克服地球引力使飞机离地飞行。其缺陷在于巡航速度较低,载重量不高,效率较低,但对地面设施的依赖度很少。
现有的固定翼飞机不能垂直起升,对起飞和降落场地要求较高,但固定翼具有滑翔能力,在飞机失去动力时可以滑翔迫降,可以提高机组成员的生存几率。而螺旋翼飞机的发动机一旦停工就会坠毁,安全性不高。因此,现有技术还有待于改进和发展。
发明内容
本发明的目的在于针对现有技术的缺陷和不足,提供一种结构合理、通过两组振动翼的往复扑动产生升力,可垂直起升且具有滑翔能力的交叉扑动滑翔飞行器。
为了实现上述目的,本发明采用以下技术方案:
本发明所述的一种交叉扑动滑翔飞行器,包括机身,所述机身的重心部上设有两组振动翼,振动翼包括两个翼翅,两个翼翅相对地设置在机身的纵向中轴线左右两侧;所述两组振动翼相互交错设置从而使机身同侧的两个翼翅前后间隔设置;所述机身上设有驱动装置,驱动装置分别传动连接两组振动翼从而使其上下往复运动。
根据以上方案,所述驱动装置包括刚性导向架,振动翼上设有滑动轴承,滑动轴承与刚性导向架配合连接从而使振动翼可沿刚性导向架上下活动;所述刚性导向架上设有两个可沿其上下活动的牵引装置,两个牵引装置通过联动杆分别连接对应的振动翼。
根据以上方案,所述振动翼的两个翼翅分别通过滑动轴承安装在刚性导向架上,同一牵引装置分别通过联动杆连接对应的两个翼翅。
根据以上方案,所述驱动装置还包括动力源,动力源通过异步机构分别传动连接两个牵引装置,牵引装置驱动两个振动翼分别沿刚性导向架上下往复运动,从而使两个振动翼相对地进行张合运动。
根据以上方案,所述翼翅的上侧平面为扰流翼面,翼翅的下侧平面为扇动翼面;所述扰流翼面由前部曲面以及后部平滑面连接构成,扰流翼面的前部曲面相对于水平面向上凸起,扰流翼面和扇动翼面在纵向的投影平面呈非对称结构。
根据以上方案,所述扰流翼面与扇动翼面的前侧缘相互闭合构成前翅缘,扰流翼面与扇动翼面的后侧缘相互闭合构成后翼尾;所述扰流翼面前部曲面的最大拱高点所在的翼展经线H靠近前翅缘。
根据以上方案,所述机身的底部设有起落架,机身的后部设有控制其飞行姿态的尾舵。
本发明有益效果为:本发明结构合理,两组振动翼相互交叉布局且分别进行上下运动,同一振动翼的两个翼翅分别在一左一右、一前一后的布局位置上,从而保证两组振动翼在进行张合运动时机身的平衡性,翼翅的扰流翼面和扇动翼面可分别提供前进动力和升力,当动力源失去动力时,两组振动翼可以充当固定翼飞机实现滑翔功能,保证飞行器能够安全着陆。
附图说明
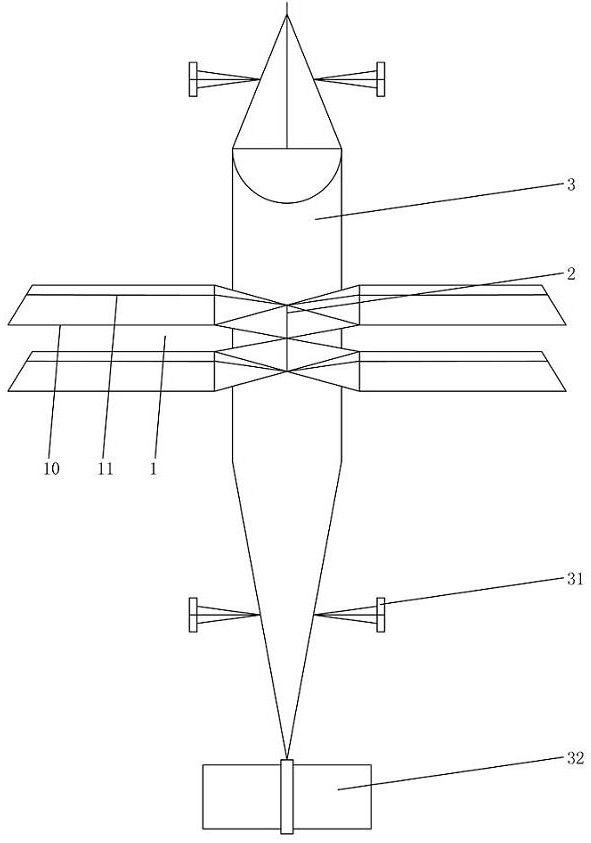
图1是本发明的整体平面视角结构示意图;
图2是本发明的振动翼与驱动装置结构示意图;
图3是本发明的振动翼与刚性导向架装配结构示意图;
图4是本发明的振动翼截面结构示意图。
图中:
1、振动翼;2、刚性导向架;3、机身;10、翼翅;11、扰流翼面;12、扇动翼面;13、前翅缘;14、后翼尾;15、滑动轴承;21、牵引装置;22、联动杆;31、起落架;32、尾舵;C、翼翅相对机身前行方向的安装角。
具体实施方式
下面结合附图与实施例对本发明的技术方案进行说明。
如图1所示,本发明所述的一种交叉扑动滑翔飞行器,包括机身3,所述机身3的重心部上设有两组振动翼1,振动翼1包括两个翼翅10,两个翼翅10相对地设置在机身3的纵向中轴线左右两侧;所述两组振动翼1相互交错设置从而使机身3同侧的两个翼翅10前后间隔设置;所述机身3上设有驱动装置,驱动装置分别传动连接两组振动翼1从而使其上下往复运动。所述两组振动翼1的四个翼翅10分别设置在机身1两侧形成对称结构,且由于两组振动翼1为交错设置,机身1一侧的两个翼翅10为一前一后的间隔设置,且该侧的两个翼翅10在同一时点的运动方向相反,另一侧的两个翼翅10之间的运动方向也相反。所述同一振动翼1上的两个翼翅10为同步运动,因此,机身1前侧或后侧的两个翼翅10在同一时点的运动方向也相反。所述两个振动翼1的交叉设置在机身1的重心位置上,保证了振动翼1在上下运动时机身1的平衡性。尤其在于,驱动装置带动两个振动翼1为相对地张合运动,可以抵消动力输出产生的作用力以及振动。两组振动翼1在机身3的重心部上做功产生升力,使机身3可以垂直升降,同时振动翼1可以采用非对称表面使其与空气之间的作用力产生向前的分解力,进而推动机身3实现飞行目的。
所述驱动装置包括刚性导向架2,振动翼1上设有滑动轴承15,滑动轴承15与刚性导向架2配合连接从而使振动翼1可沿刚性导向架2上下活动;所述刚性导向架2上设有两个可沿其上下活动的牵引装置21,两个牵引装置21通过联动杆22分别连接对应的振动翼1。所述两组振动翼1通过滑动轴承15安装在刚性导向架2上实现上下往复运动,进而牵引装置21通过联动杆22带动两个振动翼1进行相对地张合运动,产生升力和向前的驱动力使机身3获得飞行能力。
所述振动翼1的两个翼翅10分别通过滑动轴承15安装在刚性导向架2上,同一牵引装置21分别通过联动杆22连接对应的两个翼翅10。本发明优选的所述翼翅10使用了独立设置并通过滑动轴承15安装在刚性导向架2上,即机身3右前方的翼翅10与左后方的翼翅10配对构成一组振动翼1,机身3左前方的翼翅10与右后方的翼翅10配对构成另一组振动翼1,同一组振动翼1的两个翼翅10通过联动杆22连接到同一牵引装置21上实现同步运动,另一组振动1同样设置;从而当两个牵引装置21在驱动装置的带动下上下往复运动时,两组振动翼1形成相对地张合运动。
所述驱动装置还包括动力源,动力源通过异步机构分别传动连接两个牵引装置21,牵引装置21驱动两个振动翼1分别沿刚性导向架2上下往复运动,从而使两个振动翼1相对地进行张合运动。
所述翼翅10的上侧平面为扰流翼面11,翼翅10的下侧平面为扇动翼面12;所述扰流翼面11由前部曲面以及后部平滑面连接构成,扰流翼面11的前部曲面相对于水平面向上凸起,扰流翼面11和扇动翼面12在纵向的投影平面呈非对称结构。所述牵引装置21驱动振动翼1上下往复运动,振动翼1在上升行程时,翼翅10的扰流翼面11与上方空气相互作用,空气对扰流翼面11前侧曲面和后部平滑面之间产生压力差,且该压力差对翼翅10产生向前的作用力;所述振动翼1在下降行程时,翼翅10的扇动翼面12与下方空气相互作用,扇动翼面12与空气之间产生竖直向上的作用力;进而,振动翼1在牵引装置21带动下通过张合运动获得升力和向前的推进力实现飞行目的。
所述扰流翼面11与扇动翼面12的前侧缘相互闭合构成前翅缘13,扰流翼面11与扇动翼面12的后侧缘相互闭合构成后翼尾14;所述扰流翼面11前部曲面的最大拱高点所在的翼展经线H靠近前翅缘13。
所述前翅缘13为曲面从而分别接续扰流翼面11与扇动翼面12的前侧缘,前翅缘13的存在可以提高翼型平动翼1的结构强度,曲面前翅缘13可以降低振动翼1所受到空气阻力。如图4所示,图示中X方向为翼型结构的弦长方向,图示中Z方向为翼型结构的展长方向。所述扰流翼面11沿X方向截面的轮廓线相对于水平面呈曲线形,其轮廓线的最高点沿Z方向构成翼展经线H,该翼展经线H处于扰流翼面11的前部曲面上且靠近前翅缘13,从而使扰流翼面11呈前后非对称结构。振动翼1在上升时,所述扰流翼面11与上方空气相互作用,空气对扰流翼面11的翼展经线H前后两侧之间产生压力差,且该压力差对翼翅10产生向前的推进力。
所述机身3的底部设有起落架31,机身3的后部设有控制其飞行姿态的尾舵32。所述振动翼1的扰流翼面11可以提供向前的驱动力,而振动翼1通过滑行速度获得一定的升力,而振动翼1的扇动翼面12提供了主要升力,使机身3可以通过起落架31实现短距离滑行起飞,尤其在于,当驱动装置失去动力源的动力输出时,两组振动翼1相当于固定翼可以使飞行器滑翔降落从而提高安全性。
以上所述仅是本发明的较佳实施方式,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本发明专利申请范围内。
- 一种交叉扑动滑翔飞行器
- 一种可切换扑动和滑翔状态的扑翼结构及其扑翼模式切换的方法