城市自主机场(CAA)
文献发布时间:2023-06-19 10:08:35
技术领域
除了用于运送货物的UAV之外,本发明还涉及多个航站楼的自主机场,这些航站楼支持使用遥控飞行汽车并由个人作为汽车驾驶的客运航班。
背景技术
机场在国际之间、在国家之间和在偏远城市之间本地提供运输服务,这取决于具有相对中等尺寸至较大尺寸的有人驾驶飞机,但是在附近城市之间,甚至在大城市内部,都没有供个人使用或用于运输和包裹递送的公共飞行器。
近年来,针对提供专门用于包裹拾取和递送的不同服务的UAV提交了大量发明,在过去的十年中花费了数百亿美元用于与UAV相关的研发,但是同样地,即使现有技术展示支持UAV任务的设施和机器,例如由亚马逊科技公司提交的标题为“用于无人机的多级配送中心”的第WO/2017/106721 A1号国际专利申请,也不展示用于控制和处理这些操作和任务,并充当用于以有组织方式控制每个城市的所有这些UAV和飞行汽车运输活动的空军基地或中心的综合机场,而不是随机散布对于如何管理从公司商店到客户的UAV飞行的不同公司的想法和发明。还需要飞行汽车机场,而实际上,公路车辆是主要的运输工具,使用以下各项来支持所有多任务运输和民用服务:客运掀背车、运动型汽车、沙龙车、四轮驱动汽车、皮卡、公共汽车、救护车、卡车、摩托车、沙漠摩托车、巡逻车、漫游车等,但是还没有出现飞行汽车。
在空中,飞行器的形状和驱动机制极为不同且尺寸各异等。
甚至使汽车飞行都是一个梦想,在过去的十年中,一些设计、想法或模型似乎也提供了飞行汽车,例如空中客车公司提供了VTOL飞行汽车,其中将一辆小型汽车从一个停车场运送到另一城市的另一停车场,一架巨型无人机(UAV)正在接载汽车并将其放下,但没有显示任何机制如何与汽车接合或脱离,当然也没有以有组织的方式为飞行汽车机场提供安全和完全受控的降落和起飞服务。
空中可重构嵌入式系统(ARES)是可以运输各种有效载荷的无人驾驶VTOL飞行模块的概念,它由DARPA作为DARPA TX计划或将变压器转变为陆空两用飞机而启动,2013DARPA计划审查发现对飞行汽车概念的兴趣有限,提出了一种新模型,即一种不具有机身的遥控飞机,其顶部机翼带有两个侧面可枢转的函道式螺旋桨,用于起飞和巡航,而运载器将介于两者之间,以在传统机身的自由空间中运载汽车(车辆)或有效载荷。然而,这种运载器的尺寸仍然很大,即9.0m X 13.0m,不紧凑且没有提供可收起/可展开的机翼,甚至身高也很短。
然而,现有技术仅示出了关于如何将汽车从一个地方运载到另一个地方,或者如何提供可以改变成飞机的汽车且反之亦然的发明,但是没有一个人讨论带有机翼的汽车可以如何在由树荫、树木等覆盖的停车场内降落,或像空中巴士或洛克希德·马丁公司中的大车身运载器可以如何下降到将其车辆降落在树木、树荫、电线等阻碍其路径和大尺寸的位置,也未提供如何处理大量飞行汽车的大面积降落和起飞的方式。
本发明的一个目标是为城市的多个有限区域改装的机场提供一种基本的独特设置,以处理能够以有组织的方式执行用于载人飞行汽车或装有快递货物(包裹)的集装箱的安全降落、停车、起飞的无人机、客运或后勤飞机或运载汽车的特别合适的修改实施例。
本发明的另一个目的是以令人兴奋的方式将人类思维提升到极限,从而解决现代城市的高度道路交通问题,方法是通过提供和建造可以通过自主降落和起飞的多层飞行汽车停车场、升降机进行自动运行的城市机场使用宽阔、空旷且未使用的较低航空空间用空中交通替代道路交通,并且从航空集装箱运载器作为批发运送到空中接收塔的物流自动化处理,这些空中接收塔交付给自主地面站进行分割和分配作为无人机航空运载器的零售业,而机场本身则通过飞行机器人和UAV进行动态管理和维护,这些机器人和UAV可以为城市附近地区提供类似的服务,并从另一侧根据永久性安装的机翼或载送乘客的单独飞机配备客运飞行汽车,或具有支撑技术特征的航空运载器的基本独特紧凑设计来执行公路车辆的任务,但要通过在较低航空空间中飞行,使其具有与普通汽车或皮卡车类似的尺寸,以支持其易于进入停车场(降落)和从停车场离开(起飞),停车场通常适合一辆汽车,它可以在其顶部表面上载送任何形状的空气动力学主体,包括驾驶员座舱、乘客座椅、货舱、民防或警察设备、放宽室、技术人员笼、救护室、游客、带无人机的包裹、外墙清洁、救援服务、高层建筑维修等。
发明内容
根据通过GPS和受控路径程序管理的特定选定根,提供可以自主地预订(预留)选定的飞行汽车、UAV和飞行机器人以供个人使用或运输的机场。
此外,机场将通过1号航站楼通过接待大厅或自主空中接收塔来处理人员或集装箱的接收,以将乘客分配到出发区,其中汽车自动驶向起飞点,而2号和3号航站楼分配微型航空集装箱(或可分割的集装箱)从海港运往自主地面站,其中所分发的货物被自主处理至UAV,从而以零售方式在城市内递送。
在乘客上车并准备就绪后,订购了带有内置函道式螺旋桨的VTOL UAV,一旦接近汽车,就应将多层地板的UAV停机坪朝向汽车的位置,具体取决于一组激光发射器和接收器传感器,调整UAV以接合到汽车顶侧,通过夹紧机构将从突出的上水平杆拾取汽车,或者在另一实施例中,将UAV两侧的下管道朝着汽车上突出的两个杆驱动,后面的开放侧通过两个机动金属零件液压地且自动地锁定并向上伸出轿厢顶,然后UAV将汽车或集装箱运往另一个城市的另一个机场。翼式飞行汽车也可以依靠永久性构建的可折叠侧翼来飞行,或通过航空运载器运载。
一旦UAV到达另一个机场,它将降落在到达点并脱离汽车,飞向其多层停车场,等待从出发区接车...或者飞行汽车降落在升降机上以卸载和装载乘客或集装箱。
4号航站楼通过一组多种类型的UAV、飞行技术人员机器人、带有机器人手柄的飞行备件箱等提供支持服务。
附图说明
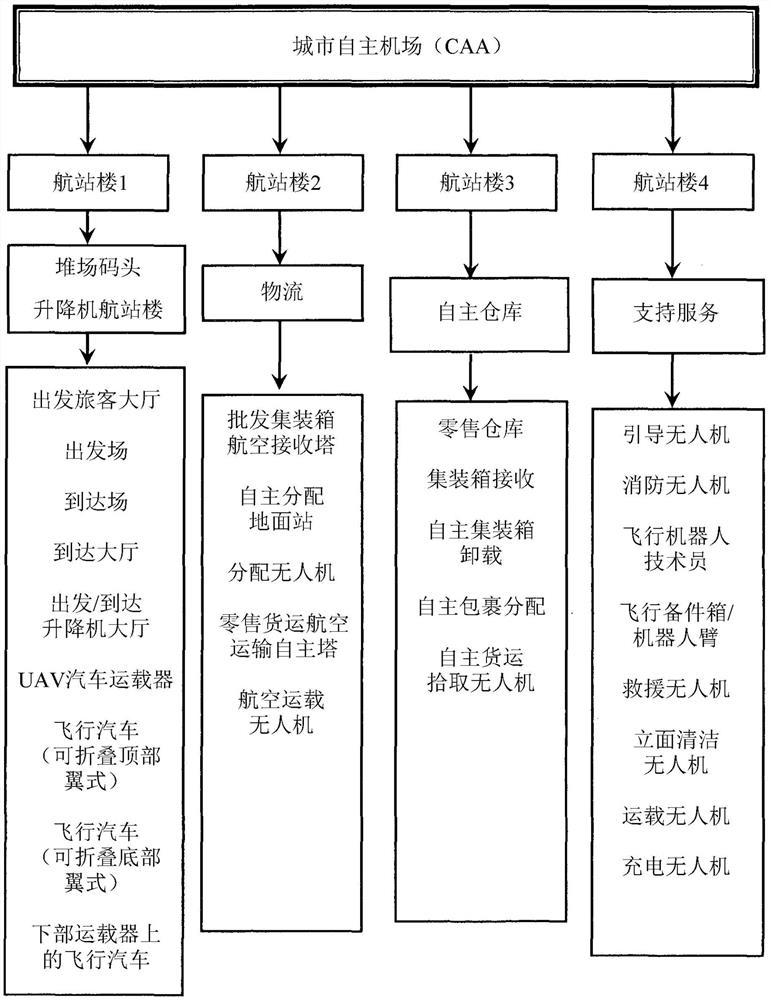
·图1:说明展示用于综合城市自主机场(CAA)的主要部门、设施、机器和工具的流程图。
·图2(A-F):说明1号航站楼的堆场码头的多个3D视图。
·图3:说明运载1号、2号和3号航站楼中的微型汽车或集装箱的改装后无人飞机运载器的多个3D视图。
·图4:说明用于接合到1号航站楼中的微型汽车的无人飞机工具的3D视图。
·图5(A-E):说明用于1号航站楼中的具有底部可折叠翼片的飞行汽车的多个3D视图。
·图6:说明用于1号航站楼中的具有上部可折叠翼片的飞行汽车的多个3D视图。
·图7(A-H):说明1号航站楼中的升降机航站楼的多个3D视图。
·图8(A-E):说明用于在1号航站楼中的航空运载器上运载的汽车的多个3D视图。
·图9:说明用于2号航站楼(塔式)中进行物流自主处理的3D视图。
·图10:说明用于3号航站楼(堆场类型)中的自动零售货物处理的3-D视图。
·图11(A-C):说明用于2号、3号和4号航站楼(支持服务)中多个包裹和货运无人机的3-D模型视图。
·图12(A-C):说明用于4号航站楼(支持服务)中具有显示屏的引导无人机的多个3D视图。
·图13(A、B):说明用于4号航站楼(支持服务)中的消防无人机的3D模型和草图。
·图14(A-C):说明用于4号航站楼(支持服务)中的具有机器人臂和可折叠翼片的飞行技术员机器人的多个3D视图。
·图15(A-C):说明用于4号航站楼(支持服务)中的具有机器人臂和可折叠翼片的飞行备件箱的多个3D视图。
·图16(A、B):说明用于救援无人机的3D模型视图。
·图17(A、B、C、D):说明用于立面清洁无人机的3D模型视图。
·图18(A、B):说明用于4号航站楼(支持服务)中的充电无人机的3D模型和草图。
·图19:说明由城市自主机场(CAA)集中化的连接网络的流程图,城市自主机场充当贸易、商业和金融的城市枢纽。
具体实施方式
实施本发明的最佳方式:
为了便于实施本发明,在此提供了由附图支持的本发明的各部件的详细描述,其中根据部件的重要性按顺序排列主要部件,以便于通过以部件描述文本中且部件编号列表中包含的编号参考每个特征来进行阅读,在此通过从数字20开始顺序地表示部件特征的编号,每当文本中出现一个部件特征时,将直接对其分配适用的序号。作为图2中的实例,部件的特征按编号20、21、22...的顺序排列。
迄今为止,在城市内部或除了其中心之外,没有一个完全组织的中心作为用于控制所有低航空空间中的多种空中交通的地面基地,也没有针对具有几乎全面的技术特征以在多个方面运行飞行汽车和UAV操作的机场(地面基地)的发明。未来,预期飞行汽车将在城市内部或城市之间,或机场之间,或甚至港口或配送中心之间以及其它交付地点之间使用,目前数百个大城市中的每个城市的道路上有至少100万辆汽车,再加上作为提供多种服务的极限要求的UAV的这些预期高空中交通流量,这意味着任何百分比的这些数万辆飞行汽车或UAV每天都拥挤在任何大城市的较低航天空间,其中每天都会发生成千上万次起飞和降落,或者每小时可能会发生成千上万次起飞和降落。
应该通过在机场陆地上对飞行汽车(飞行汽车)和UAV进行批量处理来有组织地处理这些问题,最好的方法是建立以下各项:
1-完整而独特的城市自主机场(CAA)20基础设施,用于处理飞行汽车和UAV的降落和起飞。
2-具有多个航站楼的(CAA)20,例如:旅客航站楼21、物流航站楼22、自主仓库航站楼23、支持服务航站楼(24)。
3-使用VTOL(垂直起飞和降落)航空技术来节省起飞和降落区域。
4-多个选项服务,例如:a-租用从飞行汽车机场(20)到另一飞行汽车机场的航班,b-租用在机场20之间的这两个航班(为运载传统的改装后微型汽车而改装的遥控UAV(飞机)25),其中微型汽车26将在城市内部和后方使用(图3),c-VIP租用具有内置可收起(可折叠)机翼尾翼的全时飞行汽车(翼式飞行汽车)(底部翼式飞行汽车27或顶部翼式飞行汽车28),用于在(CAA)机场20、停车场之间飞行,并作为电动汽车在城市内部道路上行驶。
5-使用GPS系统完全控制和管理的编程路径/轨迹。
6-在降落场30和起飞场31之间的多层停机坪29,可以在其中对飞机进行维护和充电。
7-在线预留和预订。
8-免费的购物区、购物中心、市场、在线仓库产品可以作为CAA 20的额外补充,CAA20可以位于城市和工业区之间,将成为最具活力、最活跃、最自主和最智能的城市枢纽处理贸易和运输,这意味着如果建立了数百个自主城市机场,则需要发射数十颗卫星来控制其运行和智能服务。
因此,要提供一个城市自主机场(CAA)20,所述城市自主机场可以根据通过GPS管理的特定选定根和受控路径程序来自主地处理用于个人用途或装运(集装箱)32的所选飞行汽车的预留(预订)或UAV服务,根据图1的机场(CAA)20基础设施应具有以下四个航站楼:
1号航站楼:
此航站楼始于接待大厅33,用于乘客(人员)或集装箱32,其中这些大厅被分配到起飞场(出发)31,其中来自停车场内部的汽车33被自动驾驶向起飞点,或者将集装箱31通过例如电动皮带朝起飞点移动,或者通过从动卡车移动,汽车和集装箱都在航站楼1内的堆场码头30中处理(图2(A-F))。
在乘客进入改装的微型汽车26并准备就绪后,订购了带有内置函道式螺旋桨、旋翼的VTOL UAV 25,一旦接近汽车,就应将多层地板的UAV停机坪29在起飞场31(图2(C、D、F))中朝向汽车的位置,随后经由一组激光发射器和接收器传感器,调整VTOL UAV 25以接合到汽车26顶侧(图3),通过夹紧机构将从突出的上水平杆34拾取汽车26,或者在另一实施例中,将UAV 25两侧的下管道35朝着汽车上突出的两个水平杆35水平地驱动,随后在接合之后,防止从水平管道35滑出汽车26,后面的开放侧通过两个机动垂直金属零件36液压地且自动地锁定并向上伸出轿厢顶(图4),然后UAV 25将汽车26或集装箱32运往另一个城市的另一个机场20。相同的拾取过程适用于集装箱32。
一旦UAV运载器25到达另一个机场20(图2(A、B、C、F)),它将降落在降落场30上并脱离汽车26,朝着其多层停车场29飞行(图2-C),根据传统机制,将每个机翼的一半沿其枢轴垂直向上收起/倾斜/摆动,以缩短其宽度以进入其停机位,在等待期间对其进行充电,技术检查或维修以便从出发区域(起飞场31)拾取另一辆汽车26(图2E)等。正常情况下,到达的汽车26驶向到达的汽车停车场37,将乘客留在那儿,或者驶离到达的航站楼并离开检查站,以用作市区内的租用汽车26并回到机场20。
在另一个实施例中,VTOL装置可以是永久地与机翼和尾翼接合以直接用作VIP选项的全时汽车,其中将不需要VTOL UAV运载器25。在底部翼式飞行汽车27实施例中,侧翼38和尾翼39在侧门和后门下方固定至飞行汽车25的底侧(图5(A-E)),因此当将翼式飞行汽车27停放在机场(CAA)20内或亲自在机场(CAA)20以外的道路上驾驶时,通过将其围绕飞行汽车27的主体垂直向上倾斜,然后如在(图5-E)中使机翼38的远端在飞行汽车27的车顶上方水平向内倾斜,侧翼38和尾翼39可以收起(可折叠),为了清楚起见,折叠状态不完全示出,此配置已更改为完全水平的类型,以使乘客在起飞、飞行和降落时可以进站并保持原状,而在驾驶时也使用可收起的配置,使用已在本领域和市场上可用的侧视和后视常规摄像头解决侧视和后视的阻挡问题。
在另一实施例中,顶部翼式飞行汽车28的翼38和尾翼39永久地安装在侧门和后门的顶侧上(图6(A-D)),翼38和尾翼39是可折叠的,而翼式飞行汽车28在市区内的道路上行驶,并在飞行中或乘客进出之时展开为水平配置。
翼式飞行汽车27、28不会在堆场码头上起飞和降落,而是在1号航站楼内设有专门设计的升降机航站楼40,其中乘客无需朝开放的场进入将要由VTOL UAV运载器25拾取的汽车26,但是,它们将从飞行汽车升降机航站楼40的始发入口进入地面(图7(A-H)),升降机航站楼内部的过程流如下:
a-翼式飞行汽车27、28降落在降落顶板41升降机航站楼40上方。
b-翼式飞行汽车27、28经由向下的降落升降机42朝着地面向下移动(图7-G)。
c-到达的乘客带着翼式飞行汽车27、28离开升降机航站楼40,以在城市内的道路上亲自驾驶和使用飞行汽车,或者在底层中心离开翼式飞行汽车27、28并从到达出口离开。
d-翼式飞行汽车27、28通过电动皮带朝向底层中的检查/充电中心。
e-翼式飞行汽车27、28通过电动皮带朝向起飞(出发)升降机43移动。
f-出发乘客进入被检查的翼式飞机27、28内,所述飞行汽车由出发升降机43朝向顶板(起飞)区域44向上运载(图7-H)。
g-在从降落升降机42朝向出发升降机43移动的过程中,对翼式飞行汽车27、28进行充电,其中太阳能电池板可以提供太阳能以对其充电。
h-在降落升降机42和出发升降机43之间并与其相邻,多层建筑物45由用于到达出口,翼式飞行汽车离开、翼式飞行汽车服务、出发口的底层组成,而其它楼层被餐厅、管理人员等占据。
机场(CAA)20的1号航站楼还配备了一种特殊的飞行汽车46(图8(A、B、C、D、E)),其中具有光滑外形的任何普通汽车品牌的车身和内部装饰以及内部装置(没有车轮)都被构建在飞行汽车运载器47上,飞行汽车运载器具有四个前函道式螺旋桨48,其具有后摆动式旋转喷管49以支撑其垂直起飞和降落,还具有可折叠的侧翼50和四个轮子51以支撑其驱动,可以从1号航站楼的场或升降机使用这些自动汽车46。
需要注意的是,需要对飞行汽车26、27、47进行改装,以提供所有必要的工具和附件,以确保乘客的安全和放松,例如:装有水、零食、饮料、口罩、用于紧急呼叫或紧急降落的SOS通讯的中心控制台,而仪表盘具有:娱乐工具、航班地图详细信息以及下方风景显示器。座椅还提供:按摩、可调整和倾斜机构。在后座上:儿童安全座椅。在车顶内侧:救生衣/救生筏。行李室:行李寄存。由于带有两个乘客和行李的整个飞行汽车的预期重量约为0.5吨,因此可以配备降落伞。
2号航站楼
为了通过较小降落区域处理空运货物,2号航站楼由多层建筑物(图9)建造,作为集装箱包裹处理的物流中心,其中通过双向集装箱升降机52从一侧接收从VTOL UAV向下掉落的航空集装箱32,升降机将这些集装箱分配到合适的楼层,在每个楼层内打开集装箱,并通过无人机54自主地拾取包裹53,所述包裹将被扫描并且无人机将它们分配到货架上55及以后根据要分配给自主地面站56的合适传送带的传送计划,将再次扫描条形码(标签、标记),将消息发送给接收者,以更新有关货物(包裹)53的跟踪状态到达目的地和预计的交付时间后,自主地面站56可以执行进一步的处理,例如安全扫描和短时存储,自主地面站内的机动传送带会将包裹53移到站外的另一侧,由无人机54将其拾取并运送到位于多升降机自主塔内的双向包裹升降机57或包裹升降机57将包裹直接送入,使包裹53向上移动,其中无人机将在包裹升降机的顶端拾取包裹并将其运送到客户位置,或者将一组包裹53送入类似于在(图11(A、B、C))中展示的一个航空运载无人机58,其配备有一组微型无人机,以将这组包裹53分配给一个特定的建筑物。
升降机52、57具有用于返回空集装箱或未接收(返回)包裹53的两种方式。
3号航站楼
为了通过扩展的降落区域处理空运货物的分配,卡车也可以进入仓库,3号航站楼被构造为批发零售分配中心(图10),其中通过双向集装箱升降机52从一侧接收装有从VTOLUAV 25向下掉落的集装箱或空运集装箱32的卡车,升降机将这些集装箱32分配到底层的电气传送带,一旦按照常规机制自主地打开集装箱32,包裹53经由无人机自主地拾取,无人机将对其进行扫描并将其分发到货架55,然后根据交付计划,将其发送到自主地面站56的合适传送带,将再次扫描条形码(标签),将消息发送给接收者,以进行更新它们关于货物(包裹)到达的跟踪状态和预期的交付时间,自主地面站56可以进一步执行例如安全扫描和短时存储,自主地面站内的机动传送带会将包裹53移到站外的另一侧,其中由无人机将其拾取,然后将包裹拾取并交付将其运送到客户所在地,或者将一组包裹53送入类似于在(图11(A、B、C))中展示的一个航空运载无人机58,其配备有一组微型无人机,以将这组包裹53分配到一个特定的建筑物大院。
升降机有可用于将空的空运集装箱返回的两种方式。
4号航站楼:
按照要求,除了将额外的服务提供给城市内部的居民区外,还将按常规建造4号航站楼,以向整个自主机场20提供支持服务。
因此,4号航站楼将成为运营中心,为设施提供机器和备件需求,以维持其自主运行、支持其服务、提供维护。这些将包含以下内容:
1-VTOL UAVS 25及其备件(图3)。
2-翼式飞行汽车27、28及其备件(图5、6)。
3-航空运载器47,其上内置有改装的常规汽车46(图8)。
4-引导无人机59(图12):这些无人机具有显示屏(60),用于通过麦克风/电话与乘客、驾驶员等进行通信并在屏幕上显示所需的具体信息而将乘客、驾驶员等引导到合适的位置,而不是让乘客去寻找雇员或反之亦然,因此引导无人机是一种自主的服务工具。
5-消防无人机61(图13):消防无人机61在其顶部表面上运载多个灭火器62。万一发生火灾,无需花很长时间等待灭火车接近,相反,遍布整个机场设施的消防无人机61准备在几秒钟内直接向室外或室内火场飞行,以应对这种情况,其中一个或多个消防无人机可以被送往火场。
也可以在城市附近的民防需求下放置额外的消防无人机61。
6-飞行机器人技术人员63(图14):这些技术人员机器人63具有可折叠的机翼64和尾翼65,以支持它们的飞行和快速进近来执行大量任务,例如:使用内置在其胸口侧的屏幕66来引导乘客,或者代替显示器66,配备备件盒以支持他们的能力,以在自主机场20内或者紧急情况下,在城市道路上的外部进行机场设施或飞行汽车的某些零件更换,其中可以通过能够连接到数据诊断连接器以读取故障存储器,了解故障部分在解决问题后删除故障存储器来修改飞行技术人员机器人63的任何手指以执行数据诊断。
7-飞行备件箱67(图15):这些箱配备有可折叠机翼65和尾翼66,以支持它们的飞行和快速进近,以根据机器人臂68进行大量的任务,这些任务可以进行焊接,钻孔等,以及大型备件箱69,例如:在机场20内部或外部为机场技术人员在短时间内提供所需备件,或者替代地在自主机场20内或者紧急情况下,在城市道路上的外部进行机场设施或飞行汽车的某些零件更换,其中可以通过能够连接到数据诊断连接器以读取故障存储器,了解故障部分在解决问题后删除故障存储器来修改机器人臂68的任何手指以执行数据诊断。
8-救援无人机70(图16-A、B):救援无人机从其底侧设置有挂钩(夹钳)71,以尽快拾取掉落的故障无人机ASAP并返回到4号航站楼。
9-立面清洁无人机72(图17-A、B、C):根据需求,为自主机场设施或城市附近的建筑物提供清洁服务,这些无人机具有可旋转刷73、供水软管、排水池。
10-充电无人机74(图18(A、B)):这些无人机具有电池75,用于通过在紧急情况下插入城市内飞行汽车的连接器76进行现场充电,并且还可根据需求为城市附近的常规电动汽车提供充电。
工业适用性:
1-城市自主机场(CAA)建筑物、工具、机器、电子服务和运输方法,其中其构造、结构、自主手段、GPS系统、路径和根控制、在线预订、空中交通监视塔、电动传送带、自动扶梯、升降机、登机、登机点、租用汽车设施等,除了UAV可与汽车接合、垂直起飞、降落、与汽车分离,或具有内置函道式螺旋桨的永久性安装的可折叠/可收起机翼和尾翼,其全部由可用的工具、零件,机构通过可适用改进制成。
2-在民用无人运输中的多种用途;从城市到城市、从机场到(CAA)、从海港到(CAA)、从工业城市仓库到(CAA)、从(CAA)到城市,因此可用于商业部门、政府部门、医院、交通管制等等。
3-自主机场(CAA)和运输方式正在重塑和重建较低的航空空间交通,以减少拥挤、更有条理、高效、盈利、有益并带来更少的污染和烦恼。
4-革命性的解决方案取代了需要长距离起飞场或较大起降空间或笨重的机构以将笨重的机翼折叠成无组织形状的所有所提议飞行汽车。
5-自主机场(CAA)及其运输方法将开放较低的航空空间,以解决特别是在大城市之间的道路高度拥挤问题。
6-将整个当前的民用贸易、批发、零售和运输重塑为更现代、更智慧、更智能和更有条理的贸易。
零件图索引:
20城市自主机场(CAA)。 50侧翼。
21旅客航站楼。 51轮子。
22物流航站楼。 52集装箱升降机。
23自主仓库航站楼。 53航空包裹。
24支持服务航站楼。 54拾取无人机。
25改装后的汽车运载飞机。 55货架。
26改装后的微型汽车。 56自主地面站
27底部翼式飞行汽车。 57包裹升降机。
28顶部翼式飞行汽车。 58航空运载无人机。
29多层停机坪。 59引导无人机。
30降落场。 60显示屏。
31起飞场。 61消防无人机。
32航空集装箱。 62熄灭器。
33接待大厅。 63飞行机器人技术员。
34两个上部水平杆。 64可折叠机翼。
35下管道。 65可折叠尾翼。
36垂直金属支架(锁)。 66显示屏。
37停车场。 67飞行工具箱。
38侧翼。 68机器人臂。
39尾翼。 69备件箱。
40升降机航站楼。 70救援无人机。
41降落顶板41。 71挂钩/夹钳
42降落升降机。 72立面清洁无人机。
43出发升降机。 73可旋转刷。
44顶板起飞区域。 74充电无人机。
45多层建筑物。 75电池。
46飞行汽车 76连接器。
47航空运载器。 77内置应急微型无人机。
48函道式螺旋桨。
49摆动式旋转喷管。
专利申请引用文件:
专利申请公开案号 公开日期 发明人:
WO2017221078 A2 2017年12月28日 ALSHDAIFAT等人
WO2017178899 A2 2017年10月19日 ALSHDAIFAT等人
WO2017178898 A2 2017年10月19日 ALSHDAIFAT等人
US2016/0023754 2016年1月28日 Daniel Wiegand
WO2017106721 A1 2016年6月22日 CURLANDER等人
WO2016203322 A2 2016年12月22日 ALSHDAIFAT等人
US2016/0311522 2016年10月27日 Daniel Wiegand
WO2014080390 A2 2014年5月30日 ALSHDAIFAT等人
WO2014080389 A2 2014年5月30日 ALSHDAIFAT等人
WO2014080388 A2 2014年5月30日 ALSHDAIFAT等人
WO2014080387 A2 2014年5月30日 ALSHDAIFAT等人
WO2014080386 A2 2014年5月30日 ALSHDAIFAT等人
W02014080385 A2 2014年5月30日 ALSHDAIFAT等人
WO2013076712 A2 2013年5月30日 ALSHDAIFAT等人
WO2013076711 A2 2013年5月30日 ALSHDAIFAT等人
- 城市自主机场(CAA)
- 一种无人机场旋翼飞行器实现精准自主起降的方法