一种带有机械臂的智能喷涂无人机
文献发布时间:2023-06-19 10:10:17
技术领域
本发明属于高空喷涂技术领域,具体涉及一种带有机械臂的智能喷涂无人机。
背景技术
随着工业生产和日常生活中高空作业的需求量逐年攀升,在大型船舶的清洗与防腐喷涂、建筑物的外墙喷涂、钢结构工业厂房喷涂、工业烟囱喷涂等领域急需大量的高空喷涂技术工人,然而我国有意愿从事高空作业的90后工人占比尚不足一成,明显难以满足实际工程需要。目前传统高空作业的解决方案为由人工主导并配合曲臂车、脚手架、升降机和吊装绳索等辅助设备完成,并且传统人工手动喷涂的方式存在用工量大、工作效率低、劳动强度大、易受环境干扰、安全事故率高、设备租赁成本高、作业质量一致性差等诸多难题。因此急需通过人工智能技术改变传统的人工劳动密集型作业方式,研发新型专用于高空喷涂的无人机,以实现“机器换人”。利用机械智能化喷涂代替人工手动喷涂将是未来高空喷涂行业发展的必然趋势。
发明内容
本发明的目的是为了解决上述现有技术上存在的问题,提供一种带有机械臂的智能喷涂无人机,本装置将机械臂技术和无人机技术进行有效结合,在无人机上部装有五自由度机械臂,并在机械臂下部固定涂料输送管,机械臂末端喷枪与涂料输送管连通,可在空中对复杂结构进行喷涂、清洗等工作。不仅能够减少涂料喷涂过程中的浪费,而且避免了操作人员高空作业,有效保证了其人身安全。
为实现上述目的,本发明采用如下技术方案:一种带有机械臂的智能喷涂无人机,具备:机架,包括机架本体和六个旋翼组件,在机架本体上方设置有喷涂调节装置,在机架本体下方设置有环形支架,在旋翼组件的外侧设置有圆环形保险杠;喷涂调节装置,包括多自由度机械臂和用于安装机械臂的旋转平台,所述旋转平台包括固定底座、平台电机和转盘,转盘设置在固定底座的中心孔处,所述固定底座固定安装在机架本体上,平台电机设置在固定底座内,平台电机的动力输出轴与转盘的中心固定连接, 用于驱动转盘相对固定底座发生转动,在机架本体和转盘上形成有上下对应的弧形穿孔;末端喷涂装置,包括电动喷枪和涂料输送管,电动喷枪设置在所述机械臂的外端部,涂料输送管沿机械臂的长度方向通过软管夹固定设置,所述涂料输送管的一端与电动喷枪连通,涂料输送管穿过所述弧形穿孔;涂料供料装置,设置于地面,包括混料机和气压罐,所述混料机通过管道与气压罐的罐口连通,所述气压罐的罐口与所述涂料输送管连通。
进一步改进本方案,所述旋翼组件一侧通过第Ⅰ机臂与机架本体连接,另一侧通过第Ⅱ机臂和保险杠连接,所述环形支架通过机臂连接杆与第Ⅰ机臂的中段连接,所述环形支架通过保险杠连接杆与保险杠连接,所述机臂连接杆长度小于保险杠连接杆的长度。
进一步改进本方案,第Ⅰ机臂和第Ⅱ机臂的连接处设置有用于盛装旋翼组件的电机机托,所述电机机托为圆形凹槽结构,在电机机托两侧侧壁形成有内螺纹,在第Ⅰ机臂和第Ⅱ机臂的末端均形成有与所述内螺纹匹配的外螺纹。
进一步改进本方案,所述机械臂包括由下至上顺次连接的机械臂组件一、机械臂组件二、机械臂组件三和机械臂组件四;机械臂组件一包括第Ⅰ俯仰臂和俯仰电机一;第Ⅰ俯仰臂的首端与俯仰电机一的动力输出轴固定连接,俯仰电机一固定安装在转盘中心处,俯仰电机一用于对于第Ⅰ俯仰臂进行俯仰调节;机械臂组件二包括第Ⅱ俯仰臂和俯仰电机二;第Ⅱ俯仰臂的首端与俯仰电机二的动力输出轴固定连接,所述俯仰电机二安装在第Ⅰ俯仰臂的尾端,用于对第Ⅱ俯仰臂进行俯仰调节;机械臂组件三包括旋转臂和旋转电机,旋转臂的首端与旋转电机的动力输出轴连接,所述旋转电机固定安装在第Ⅱ俯仰臂的尾端,旋转电机用于驱动旋转臂沿其动力输出轴轴线做360°的旋转运动,当旋转臂每转动90°,用于实现所述机械臂组件四在俯仰动作和左右摇摆动作之间进行切换;机械臂组件四包括摇摆臂和摇摆电机,摇摆臂的首端与摇摆电机的动力输出轴固定连接;所述摇摆电机固定安装在旋转臂的尾端,摇摆电机,用于驱动摇摆臂进行上下俯仰动作或左右摇摆动作。
进一步改进本方案,所述第Ⅰ俯仰臂和第Ⅱ俯仰臂的结构相同,均包括第一臂板、第二臂板和连接部,所述第一臂板和第二臂板长度相同且相对平行设置,连接部两端分别与第一臂板和第二臂板的中段连接,俯仰电机一和俯仰电机二均固定设置在第一臂板和第二臂板之间且位于机械臂的端头;旋转臂包括第一臂板、第二臂板和端部臂板,所述第一臂板和第二臂板长度相同且相对平行设置,端部臂板垂直连接在第一臂板和第二臂板的同侧端部,旋转电机输出轴与端部臂板固定连接,用于驱动旋转臂进行转动,以实现机械臂组件四工作状态切换。
进一步改进本方案,所述电动喷枪安装在摇摆臂的尾端,所述电动喷枪包括喷枪本体,喷枪本体由夹持部和喷涂部组成,所述夹持部和喷涂部一体成型且内部连通,夹持部为长方体结构,喷涂部为圆柱形中空腔体结构。
进一步改进本方案,所述夹持部一侧侧壁设置有涂料输入口,在夹持部上还设置有喷涂控制机构,所述喷涂控制机构包括喷涂电机、电机凸轮和顶杆组件,所述喷涂电机通过电机支撑架固定在夹持部另一侧侧壁上;电机凸轮安装在喷涂电机的动力输出轴上,所述顶杆组件的动力输入一侧与电机凸轮接触,顶杆组件的动力输出一侧与喷枪柱塞铰接,喷枪柱塞由夹持部的尾端伸入,用于推动涂料通过喷涂部的中空腔体并经喷嘴喷出。
进一步改进本方案,所述顶杆组件包括连接板、顶杆、端板和支撑杆,顶杆和端板分别设置在连接板的两端,并均垂直设置于连接板的同侧,顶杆的长度大于端板长度,在顶杆的端部设置有用于和电机凸轮接触的顶板,所述支撑杆固定设置在夹持部尾端侧壁上,连接板的中段通过销轴与支撑杆端部铰接,以随着电机凸轮转动,通过连接板绕销轴转动从而驱动喷枪柱塞往复运动。
进一步改进本方案,还包括储能设备,所述储能设备位于地面,储能设备通过供电线与机架连接,并通过电能转换装置为无人机供电。
有益效果
1、本发明通过创新,对无人机的结构进行改进,将机械臂技术和无人机技术进行有效结合,提高在高空喷涂作业的施工效率,同时提高了设备操作的安全性,具体分析如下:通过将无人机和机械臂进行有机结合分为四部分:机架部分、设置在机架上的喷涂调节装置部分、安装在喷涂调节装置上的末端喷涂装置部分以及位于地面的涂料供料装置四部分,通过机架部分提供动力,实现了涂料装置部分进行高空自动作业,而涂料供料装置在地面将混合好的涂料通过管道对涂料装置部分进行物料供应,能够有效减低无人机的承载重量,同时,考虑到高空作业环境的复杂程度,设置了五自由度的机械臂组件,其中第Ⅰ俯仰臂可以实现俯仰调节,当第Ⅰ俯仰臂的俯仰角度不能满足操作需求时,可以通过第Ⅱ俯仰臂进行俯仰调节,双重俯仰调节,能够增大俯仰臂的运动范围,提高喷枪的施工作业范围,其次考虑到喷枪需要进一步提升全方位的作业能力,具体分析如下:设置旋转臂和俯仰摇摆臂,旋转臂能够进行360°转动,使得喷枪能够在俯仰动作和左右摇摆动作之间进行切换,俯仰摇摆臂,提高了喷枪操作的灵活性,能够根据需要进行左右摇摆动作和俯仰动作的施工。
2、本发明,对喷枪的结构进行改进,提升了喷涂作业的操作可靠性,具体分析如下:喷枪结构改进为三部分,形成有涂料输入口的喷枪主体、安装在喷枪主体上的驱动部件和顶杆组件,其中驱动部件包括喷涂电机和电机凸轮,电机凸轮绕电机轴旋转,从而带动顶杆组件进行周期性往复运动,凸轮结构外缘呈弧形曲线,包括大头端和凸起的小头端,凸轮每转动一周,由于其外缘始终与顶板接触,会带动顶板往复运动,该喷枪组件通过与气压罐进行配合,实现了喷涂操作的可靠性。
附图说明
为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
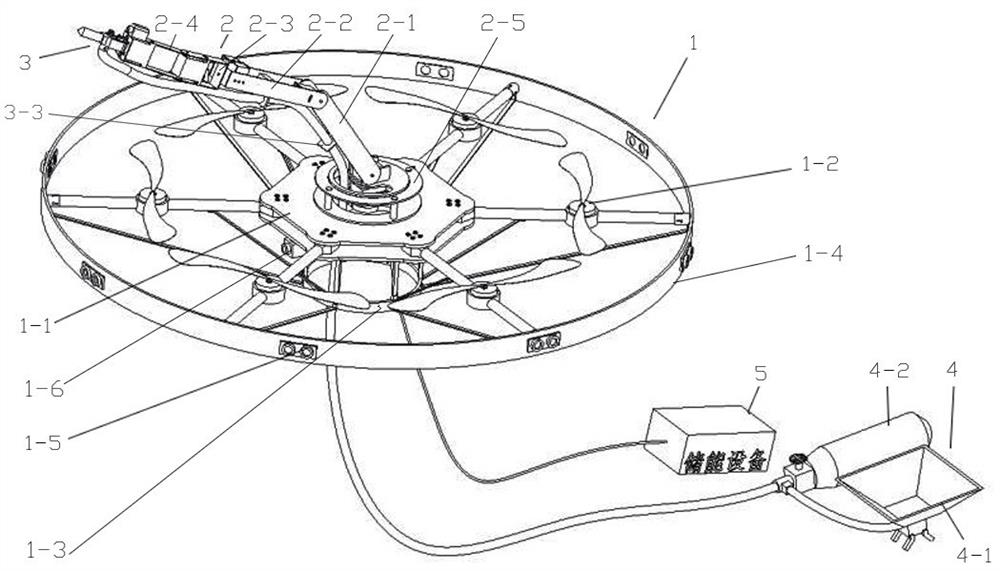
图1为本发明智能喷涂无人机的第一视角的结构图;
图2为本发明智能喷涂无人机的第二视角的结构图;
图3为本发明中喷涂调节装置的结构图;
图4为本发明中机械臂末端的结构图;
图5为本发明中夹爪机构的结构图;
图6为本发明中电动喷枪的结构图;
图中标记:1、机架,1-1、机架本体,111、第Ⅰ机臂,112、第Ⅱ机臂,113、机臂连接杆,114、保险杠连接杆,115、电机机托,1-2、旋翼组件,1-3、环形支架,1-4、保险杠,1-5、超声波测距传感器,1-6、机身摄像头,1-7、喷涂摄像头,2、喷涂调节装置,2-1、机械臂组件一,211、第Ⅰ俯仰臂,212、俯仰电机一,2-2、机械臂组件二,221、第Ⅱ俯仰臂,222、俯仰电机二,2-3、机械臂组件三,231、旋转臂,232、旋转电机,2-4、机械臂组件四,241、摇摆臂,242、摇摆电机,2-5、旋转平台,251、固定底座,252、平台电机,253、转盘,254、弧形穿孔, 2-6、夹爪机构,261、夹爪平台,262、夹爪电机,263、齿条导轨,264、齿条,265、夹爪一,266、夹爪二,267、驱动齿轮,3、末端喷涂装置,3-1、电动喷枪,311、喷枪本体,312、喷枪柱塞,313、顶板,314、喷涂电机,315、电机凸轮,316、连接板,317、顶杆,318、端板,319、支撑杆;3-2、涂料输送管,3-3、软管夹;4、涂料供料装置,4-1、混料机,4-2、气压罐;5、储能设备。
具体实施方式
为了使本发明的技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
如图所示:本实施例提供一种带有机械臂的智能喷涂无人机, 具备机架1、喷涂调节装置2、末端喷涂装置3和涂料供料装置4,其中机架1包括机架本体1-1和六个旋翼组件1-2,在机架本体1-1上方设置有喷涂调节装置2,在机架本体1-1下方设置有环形支架1-3,在旋翼组件1-2的外侧设置有圆环形保险杠1-4;喷涂调节装置2,包括五自由度机械臂和用于安装机械臂的旋转平台2-5,所述旋转平台2-5包括固定底座251、平台电机252和转盘253,转盘253设置在固定底座251上部中心孔处,所述固定底座通固定安装在机架本体1-1上,平台电机252设置在固定底座251内,平台电机252的动力输出轴与转盘253的中心固定连接,用于驱动转盘253相对固定底座251发生转动;固定底座由上下两个相对平行设置的环形盘和连接在两个环形盘之间的连接杆组成,在机架本体1-1、固定底座251和转盘253上对应形成有上下对应的弧形穿孔254,也即弧形穿孔254为一个呈180°角度的半圆圆弧。
末端喷涂装置3,包括电动喷枪3-1和涂料输送管3-2,电动喷枪3-1设置在所述机械臂的外端部,涂料输送管3-2沿机械臂的长度方向通过软管夹3-3固定设置,所述涂料输送管3-2的一端与电动喷枪3-1连通,涂料输送管3-2穿过所述弧形穿孔254,当机械臂转动时,由于弧形穿孔254的设置,机械臂转动中不会造成对涂料输送管3-2挤压;涂料供料装置4,设置于地面,包括混料机4-1和气压罐4-2,所述混料机4-1通过管道与气压罐4-2的罐口连通,所述气压罐4-2的罐口与所述涂料输送管3-2连通。
旋翼组件1-2一侧通过第Ⅰ机臂111与机架本体1-1连接,另一侧通过第Ⅱ机臂112和保险杠1-4连接,第Ⅰ机臂111通过螺丝连接在机架本体1-1的8个连接点,第Ⅱ机臂112通过螺丝与保险杠1-4固定连接,第Ⅰ机臂111和第Ⅱ机臂112的连接处形成有用于盛装旋翼组件1-2的电机机托115,所述电机机托115为圆形凹槽结构,在电机机托115两侧侧壁形成有内螺纹,在第Ⅰ机臂111和第Ⅱ机臂112的末端均形成有与所述内螺纹匹配的外螺纹。
环形支架1-3通过机臂连接杆113与第Ⅰ机臂111的中段连接,所述环形支架1-3通过保险杠连接杆114与保险杠1-4连接,所述机臂连接杆113长度小于保险杠连接杆114的长度。所述保险杠1-4的外部分布着8个超声波测距传感器1-5。
本方案在机架本体1-1上部装有机械臂,所述机械臂可进行上下180°和左右270°的旋转。平台电机253装在无人机机身上部中心处,由平台电机253带动转盘253绕转盘轴线进行旋转运动。
机械臂包括由下至上顺次连接的机械臂组件一2-1、机械臂组件二2-2、机械臂组件三2-3和机械臂组件四2-4;机械臂组件一2-1包括第Ⅰ俯仰臂211和俯仰电机一212;第Ⅰ俯仰臂211的首端与俯仰电机一212的动力输出轴固定连接,俯仰电机一212固定安装在转盘253中心处,俯仰电机一212用于对于第Ⅰ俯仰臂211进行俯仰调节;机械臂组件二2-2包括第Ⅱ俯仰臂221和俯仰电机二222;第Ⅱ俯仰臂221的首端与俯仰电机二222的动力输出轴固定连接,所述俯仰电机二222安装在第Ⅰ俯仰臂211的尾端,用于对第Ⅱ俯仰臂221进行俯仰调节;机械臂组件三2-3包括旋转臂231和旋转电机232,旋转臂231的首端与旋转电机232的动力输出轴连接,所述旋转电机232固定安装在第Ⅱ俯仰臂221的尾端,旋转电机232用于驱动旋转臂231沿其动力输出轴轴线做360°的旋转运动,当旋转臂231每转动90°,用于实现所述机械臂组件四2-4在俯仰动作和左右摇摆动作之间进行切换;机械臂组件四2-4包括摇摆臂241和摇摆电机242,摇摆臂241的首端与摇摆电机242的动力输出轴固定连接;所述摇摆电机242固定安装在旋转臂231的尾端,摇摆电机242用于驱动摇摆臂241进行上下俯仰动作或左右摇摆动作。
本方案中,特别地,所述第Ⅰ俯仰臂211和第Ⅱ俯仰臂221的结构相同,均包括第一臂板、第二臂板和连接部,所述第一臂板和第二臂板长度相同且相对平行设置,连接部两端分别与第一臂板和第二臂板的中段连接,俯仰电机一212和俯仰电机二222均固定设置在第一臂板和第二臂板之间且位于机械臂端头。旋转臂231包括第一臂板、第二臂板和端部臂板,所述第一臂板和第二臂板长度相同且相对平行设置,端部臂板垂直连接在第一臂板和第二臂板的同侧端部,旋转电机232输出轴与端部臂板固定连接,用于驱动旋转臂231进行转动,以实现机械臂组件四2-4工作状态切换。
电动喷枪3-1通过安装在摇摆臂241的尾端,所述电动喷枪3-1包括喷枪本体311,喷枪本体311由夹持部和喷涂部组成,所述夹持部和喷涂部一体成型且内部连通,夹持部为长方体结构,喷涂部为圆柱形中空腔体结构,所述夹持部和喷涂部一体成型且内部连通,夹持部为长方体结构,喷射部为圆柱形中空腔体结构。所述夹持部一侧侧壁设置有涂料输入口,在夹持部上还设置有涂料喷射机构,所述涂料喷射机构包括喷涂电机314、电机凸轮315和顶杆组件,所述喷涂电机314通过电机支撑架固定在夹持部另一侧侧壁上,电机凸轮315安装在喷涂电机314的动力输出轴上,所述顶杆组件的动力输入一侧与电机凸轮315接触,顶杆组件的动力输出一侧与喷枪柱塞312铰接,喷枪柱塞312由夹持部的尾端伸入,用于推动涂料通过喷涂部3-2的中空腔体并经喷嘴喷出。顶杆组件包括连接板316、顶杆317、端板318和支撑杆319,顶杆317和端板318分别设置在连接板316两端,并均垂直设置于连接板316的同侧,顶杆317的长度大于端板318长度,在顶杆317的端部设置有用于和电机凸轮315接触的顶板313,所述支撑杆319固定设置在夹持部尾端侧壁上,连接板316的中段通过销轴与支撑杆319端部铰接,以用于实现电机凸轮315转动,从而推动顶板313往复运动,连接板316绕销轴转动从而驱动喷枪柱塞312在喷枪本体311内往复运动,电机凸轮315以大头端与顶板313接触为起点开始运动,顶板313在电机凸轮315的推动下,逐渐远离电机输出轴,当小头端与顶板313接触时,是顶板313与电机输出轴相距最远距离,随后,电机凸轮315转动,顶板313会逐渐靠近电机输出轴一侧,从而完成一个周期的喷涂动作。
由图可以看出,所述电机支撑架装在枪体上部,用于固定喷涂电机314,当喷涂电机314带动电机凸轮315旋转,电机凸轮315推动顶杆317,经连接板316把力传给喷枪柱塞312,喷枪柱塞312挤压枪体内部涂料,涂料经喷嘴喷出,从而完成一次喷涂过程。
为了使该装置具有更好的效果,进一步优化本方案,无人机供电线一端与地面的储能设备5相连,另一端与无人机主体内部的电能转换装置相连。通过电能转换装置为无人机供电,实现长久续航的能力。其次机械臂尾部设置有电动喷枪的安装结构,根据不同的喷涂需求和维修需要更换电动喷枪,适用范围广,通过进行喷枪快速拆卸更换,使得无人机和喷涂装置实现有机衔接,避免了由于电动喷枪型号与被喷涂物不匹配,造成的喷涂效率低下,喷涂效果不理想;为避免此情况发生,可设置如下结构:在机械臂的末端设置有夹爪机构2-6,夹爪机构2-6包括夹爪平台261,夹爪平台261的内侧要设置有两个上下相对的夹爪电机262,夹爪电机262的输出轴穿过夹爪平台261安装有驱动齿轮267,在两驱动齿轮267的内侧均水平设置有对应的相平行齿条导轨263,齿条导轨263固定在夹爪平台261上,在齿条导轨261内设置有可滑动的齿条264,驱动齿轮267与对应齿条264相啮合,其中上侧的齿条264与夹爪一265连接,下侧的齿条264在相反一侧和夹爪二266连接,当两台夹爪电机262同时顺时针旋转时,带动两个驱动齿轮267顺时针旋转,两个夹爪向内移动夹取喷枪,两台夹爪电机262同时逆时针旋转,带动两个驱动齿轮267逆时针旋转,两个夹爪向外移动松开喷枪,从而实现无人机喷枪的安装拆卸。
本装置带有机械臂,可抓取喷枪对目标物体进行多角度喷涂;装置带有电动喷枪3-1,减少涂料喷涂过程中的浪费,尽最大限度的保障涂料的利用率;装置带有保险杠1-4,保障无人机主体在因故障落地时不受损害;本装置使用地面储能设备5供电,可实现长续航,保障工作时间;装置带超声波测距传感器1-5,实现无人机的自动避障,可使无人机在复杂的环境下工作。装置带有无人机机身摄像头1-6和喷涂摄像头1-7,机身摄像头1-6用于分析出各目标位置后结合总体规划的路径做适当修正,使无人机能够到达适合机械臂喷涂的位置,同时向机械臂运动控制系统发送喷涂过程所需的目标详细位置与区域信息,到达目标位置后,位于机械臂末端的喷涂摄像头1-7根据目标信息调整电动喷枪3-1位置完成喷涂作业。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种带有机械臂的智能喷涂无人机
- 一种带有机载机械臂无人机的喷涂控制系统