一种自走机器人及其使用方法
文献发布时间:2023-06-19 10:10:17
技术领域
本发明属于半导体制造领域,尤其是涉及一种自走机器人及其使用方法。
背景技术
在半导体硅单晶制造领域中,使用避免人工接触产品的自走式机器人进行产品的搬运,上下料是一种高效安全的自动化搬运方式。该方式自诞生以来,被多家半导体厂家尝试使用,随着越来越多自走式机器人在半导体车间应用,传统的基于多控制器协同工作的自走式机器人的效率问题,稳定性问题,部署和修改问题都逐渐地暴露出来,且多控制器和控制系统也导致产品制造成本高,造成在行业内半导体搬运自行走机器人始终属于试用阶段,没有形成大批量商业化发展。传统上的,2-3个互相通讯的控制器,逐一进行设置,逐一设置的过程需要注意各个控制器设置的顺序,彼此的关系,操作的过程容易出现错误,设置的结果可靠性和稳定性也存在问题,这对于高疲劳强度的半导体产业来说,是灾难性的。
发明内容
本发明要解决的问题是提供一种自走机器人及其使用方法,有效的解决自走式机器人系统稳定性差,可靠性差,现场实施耗时费力且整体成本高,不能大规模生产的问题。
为解决上述技术问题,本发明采用的技术方案是:一种自走机器人,包括控制系统和控制器,其特征在于:所述控制系统设置在所述自走机器人上,用于控制所述自走机器人搬运物料;所述控制器用于控制所述控制系统。
优选地,所述控制系统包括AGV控制系统和机器人控制系统,所述AGV控制系统设置在底盘上,用于控制所述自走机器人移动;所述机器人控制系统设置在所述自走机器人上,用于控制所述自走机器人搬运所述物料。
优选地,所述AGV控制系统还包括AGV电机控制系统和AGV传感器,所述AGV电机控制系统设置在所述底盘上,用于控制所述自走机器人是否移动;所述AGV传感器设置在所述底盘上,用于控制所述自走机器人的移动方向。
优选地,所述控制系统还包括载台传感器和视觉传感器,所述载台传感器设置在载台上,用于检测所述载台上是否存在所述物料;所述视觉传感器设置在所述自走机器人上,用于检测所述物料的位置。
优选地,所述控制器包括按钮和信息发射系统,所述按钮设置在所述控制器上,用于控制所述信息发射系统;所述信息发射系统设置在所述控制器内部,用于发射信息控制所述控制系统。
一种使用如权利要求1所述的一种自走机器人的方法,其特征在于:所述控制器控制所述控制系统,所述控制系统控制所述自走机器人搬运所述物料。
优选地,所述控制系统包括AGV控制系统和机器人控制系统,所述AGV控制系统设置在底盘上,用于控制所述自走机器人移动;所述机器人控制系统设置在所述自走机器人上,用于控制所述自走机器人搬运所述物料;在使用时,所述AGV控制系统控制所述自走机器人移动,移动至目标位置后,所述机器人控制系统控制所述自走机器人搬运所述物料。
优选地,所述AGV控制系统还包括AGV电机控制系统和AGV传感器,所述AGV电机控制系统设置在所述底盘上,用于控制所述自走机器人是否移动;所述AGV传感器设置在所述底盘上,用于控制所述自走机器人的移动方向;在使用时,所述AGV电机控制系统控制所述自走机器人开始向目标方向移动,所述AGV传感器判断前方是否有障碍物,若有所述障碍物,控制所述自走机器人转换方向,绕过所述障碍物后继续向目标方向前进。
优选地,所述控制系统还包括载台传感器和视觉传感器,所述载台传感器设置在载台上,用于检测所述载台上是否存在所述物料;所述视觉传感器设置在所述自走机器人上,用于检测所述物料的位置;在使用时,所述视觉传感器判断所述物料的位置,将位置信息传递给所述AGV控制系统,所述机器人控制系统控制所述自走机器人搬运所述物料至载台上,所述载具传感器判断所述物料是否处于所述载台上。
优选地,所述控制器包括按钮和信息发射系统,所述按钮设置在所述控制器上,用于控制所述信息发射系统;所述信息发射系统设置在所述控制器内部,用于发射信息控制所述控制系统;在使用时,人员按下所述控制器的相应按钮,信息发射系统发射相应的信息至所述控制系统,所述控制系统控制所述自走机器人搬运物料。
由于单一控制器的设计,使得工作人员不用同时控制2-3个控制器,解决机器不协调配合、不稳定、现场实施耗时费力的问题;由于自走机器人的设计,解决了系统稳定性差,可靠性差,现场实施耗时费力且整体成本高,不能大规模生产的问题。
附图说明
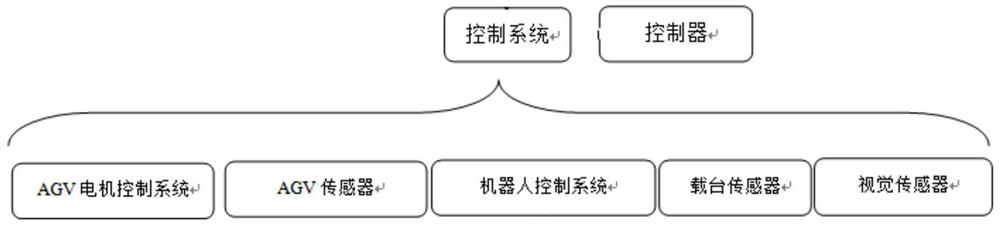
图1是本发明实施例一种自走机器人控制系统结构示意图
具体实施方式
下面结合实施例和附图对本发明作进一步说明:
在本发明实施例的描述中,需要理解的是,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
本发明的一个实施例中,如图1一种自走机器人控制系统结构示意图所示:一种自走机器人,包括控制系统和控制器,其特征在于:所述控制系统设置在所述自走机器人上,用于控制所述自走机器人搬运硅片载具;所述控制器用于控制所述控制系统。
具体的,所述控制系统包括AGV控制系统和机器人控制系统,所述AGV控制系统设置在自走机器人的底盘上,控制所述自走机器人移动;AGV控制系统还包括AGV电机控制系统和AGV传感器,所述AGV电机控制系统用螺栓安装在自走机器人的底盘上,控制所述自走机器人底盘的前进或停止,所述底盘带动机器人移动;所述AGV传感器用螺栓安装在自走机器人底盘上,用于控制所述自走机器人的移动方向;前方若有障碍物,AGV传感器控制所述自走机器人底盘改变移动方向,绕开障碍物,躲避完成后,继续向目标方向前进。所述机器人控制系统设置在所述自走机器人上,控制所述自走机器人搬运硅片载具。
所述控制系统还包括载台传感器和视觉传感器,所述载台传感器设置在自走机器人的载台上,在自走机器人搬运完硅片载具至载台后,检测所述载台上是否存在硅片载具;所述视觉传感器设置在所述自走机器人偏上部,检测硅片载具的具体位置,然后将信息传入到AGV电机控制系统,确定目标方向。
所述控制器包括按钮和信息发射系统,所述按钮设置在所述控制器上,用于控制所述信息发射系统,按钮个数不限,对应的功能位置也不限,包括启动按钮和结束按钮,控制器只有一个,解决机器不协调配合、不稳定、现场实施工作人员耗时费力的问题;所述信息发射系统设置在所述控制器内部,按钮按下后,发射信息控制相应的控制系统。
在使用时,工作人员控制控制器,按下开始按钮后,信息发射系统发射信息控制AGV电机控制系统自走机器人开始移动,此时视觉传感器开始工作,确定硅片载具的位置,定制目标方向,将信息传输至AGV电机控制系统。AGV电机控制系统控制自走机器人底片开始向目标方向移动,移动过程中,AGV传感器开始工作,判断自走机器人前方有无障碍物,若有障碍物,将信息传输至AGV电机控制系统,控制自走机器人换一个方向,绕开障碍物后,转换方向,继续向目标方向移动。移动至目标位置后,机器人控制系统控制自走机器人将硅片载具搬起,放置在自走机器人的载台上,此时载台传感器检测硅片载具是否处于载台上,若在载台上,则继续移动至目标位置,若不在载台上,则机器人控制系统继续控制自走机器人重新搬运硅片载具至载台上。检测硅片载具在载台上后,视觉传感器寻找要搬运到的地方,确定下一移动目标方向,将信息传输至AGV电机控制系统。AGV电机控制系统控制自走机器人底片开始向目标方向移动,移动过程中,AGV传感器开始工作,判断自走机器人前方有无障碍物,若有障碍物,将信息传输至AGV电机控制系统,控制自走机器人换一个方向,绕开障碍物后,转换方向,继续向目标方向移动。移动至目标位置后,机器人控制系统控制自走机器人卸下载台上的硅片载具,此时载台传感器检测硅片载具是否处于载台上,若在载台上,机器人控制系统再次控制自走机器人将硅片载具卸下,若不在载台上,则重复上述操作,继续搬运硅片载具,搬运结束后,工作人员按下结束按钮,控制AGV电机控制系统停止运转,整个工作过程结束。
本发明的另一实施例中,所述控制系统包括AGV控制系统和机器人控制系统,所述AGV控制系统设置在自走机器人的底盘上,控制所述自走机器人移动;AGV控制系统还包括AGV电机控制系统,所述AGV电机控制系统用螺栓安装在自走机器人的底盘上,控制所述自走机器人底盘的前进或停止,所述底盘带动机器人移动;所述机器人控制系统设置在所述自走机器人上,控制所述自走机器人搬运硅片载具。
所述控制系统还包括载台传感器和视觉传感器,所述载台传感器设置在自走机器人的载台上,在自走机器人搬运完硅片载具至载台后,检测所述载台上是否存在硅片载具;所述视觉传感器设置在所述自走机器人偏上部,检测硅片载具的具体位置,然后将信息传入到AGV电机控制系统,确定目标方向。
所述控制器包括按钮和信息发射系统,所述按钮设置在所述控制器上,用于控制所述信息发射系统,按钮个数不限,对应的功能位置也不限,包括启动按钮、结束按钮和方向控制按钮,控制器只有一个,解决机器不协调配合、不稳定、现场实施工作人员耗时费力的问题;所述信息发射系统设置在所述控制器内部,按钮按下后,发射信息控制相应的控制系统。
在使用时,工作人员控制控制器,按下开始按钮后,信息发射系统发射信息控制AGV电机控制系统自走机器人开始移动,此时视觉传感器开始工作,确定硅片载具的位置,定制目标方向,将信息传输至AGV电机控制系统。AGV电机控制系统控制自走机器人底片开始向目标方向移动,移动过程中,需要工作人员随时观察自走机器人的移动方向上是否有障碍物,若有,需要工作人员控制控制器上的方向控制按钮。移动至目标位置后,机器人控制系统控制自走机器人将硅片载具搬起,放置在自走机器人的载台上,此时载台传感器检测硅片载具是否处于载台上,若在载台上,则继续移动至目标位置,若不在载台上,则机器人控制系统继续控制自走机器人重新搬运硅片载具至载台上。检测硅片载具在载台上后,视觉传感器寻找要搬运到的地方,确定下一移动目标方向,将信息传输至AGV电机控制系统。AGV电机控制系统控制自走机器人底片开始向目标方向移动,移动过程中,需要工作人员随时观察自走机器人的移动方向上是否有障碍物,若有,需要工作人员控制控制器上的方向控制按钮。移动至目标位置后,机器人控制系统控制自走机器人卸下载台上的硅片载具,此时载台传感器检测硅片载具是否处于载台上,若在载台上,机器人控制系统再次控制自走机器人将硅片载具卸下,若不在载台上,则重复上述操作,继续搬运硅片载具,搬运结束后,工作人员按下结束按钮,控制AGV电机控制系统停止运转,整个工作过程结束。
以上对本发明的多个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 一种基于物联网防走偏的机器人及其使用方法
- 一种自走式农药喷洒机器人及其使用方法