一种缓慢任务降级的辅助动力系统保护性停车控制方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明属于航空动力控制领域,涉及一种辅助动力系统保护性停车控制方法。
背景技术
辅助动力系统(APU)是独立于发动机的动力系统,用于向飞机提供辅助或应急能源、引气功率、液压功率和电功率,是保障飞机安全飞行的关键系统。
随着辅助动力系统功能日渐复杂,故障条目也越来越多,识别和分析系统故障的手段和方法也越来越丰富。
现有的辅助动力系统保护性停车控制方法是:当辅助动力系统运行出现某一/某些故障时,辅助动力系统统一自动控制实现完全停车(APU停车);然后,识别和分析系统故障,待排除故障后,再重启系统恢复正常状态继续运行。
发明内容
本发明的目的是为了改善辅助动力系统保护性停车控制方法,增强辅助动力系统实际运行的稳定性和工作能力。
为了实现以上目的,本发明提出以下技术方案:
一种缓慢任务降级的辅助动力系统保护性停车控制方法,包括:
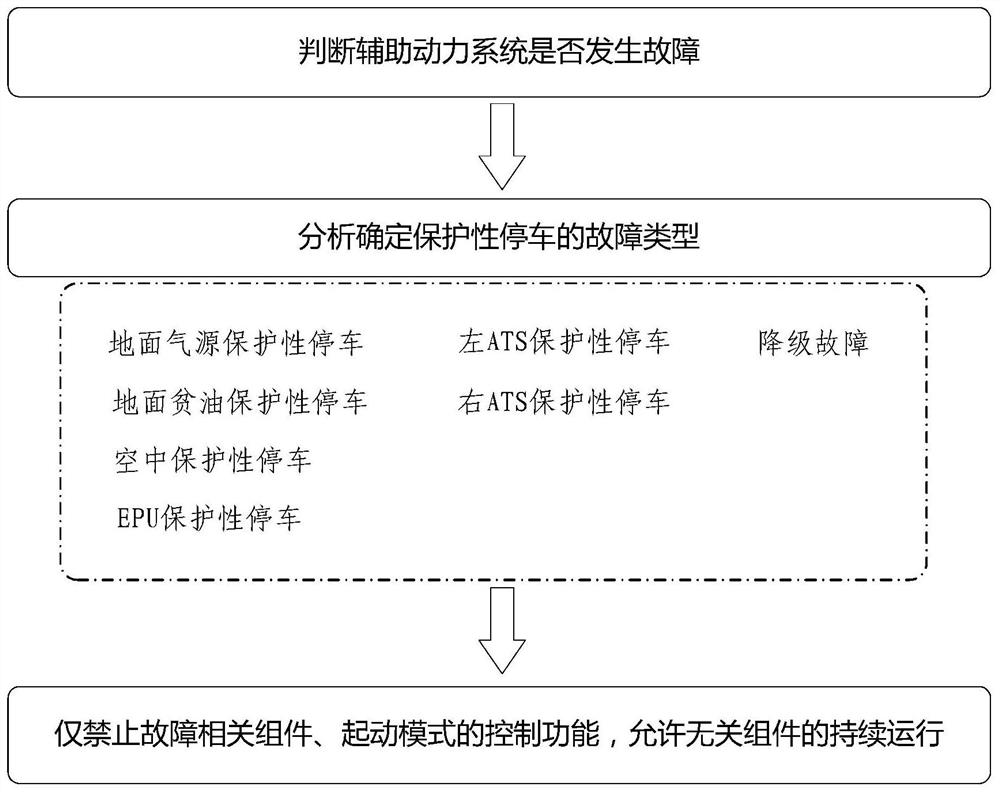
步骤1)判断辅助动力系统是否发生故障;当发生故障时,相关组件或起动模式即发生保护性停车,同时执行步骤2);所述起动模式包括地面气源模式、地面贫油模式、空中模式和EPU模式;
步骤2)分析确定保护性停车的故障类型;所述故障类型分为地面气源保护性停车故障、地面贫油保护性停车故障、左ATS保护性停车故障、右ATS保护性停车故障、空中保护性停车故障、EPU保护性停车故障和降级故障;
步骤3)针对不同的故障类型,仅禁止相关组件、起动模式的控制功能,同时允许无关组件的持续运行。
可选地,步骤3)具体执行:
a)当发生地面气源保护性停车故障时,APU会停车,但仅禁止地面气源模式起动APU,允许其余模式的起动;
b)当发生地面贫油保护性停车故障时,APU会停车,但仅禁止地面贫油模式起动APU,允许其余模式的起动;
c)当发生左ATS保护性停车故障时,则除左ATS外的其余组件持续运行,且仅禁止左ATS起动,允许其余模式的起动;
d)当发生右ATS保护性停车故障时,则除右ATS外的其余组件持续运行,且仅禁止右ATS起动,允许其余模式的起动;
e)当发生空中保护性停车故障时,APU会停车,但仅禁止空中模式起动APU,允许其余模式的起动;
f)当发生EPU保护性停车故障时,仅禁止EPU起动,允许其余模式的起动;
g)当发生降级故障时,系统持续运行。
可选地,在步骤2)分析确定保护性停车的故障类型后,还产生相应的故障标识。
进一步可选地,步骤3)还根据所述故障标识生成故障字后上报上级系统。
本发明还相应提出一种缓慢任务降级的辅助动力系统保护性停车控制系统,包括:
系统状态判断模块,用于判断辅助动力系统是否发生故障;
故障分析模块,用于分析确定保护性停车的故障类型;所述故障类型分为地面气源保护性停车故障、地面贫油保护性停车故障、左ATS保护性停车故障、右ATS保护性停车故障、空中保护性停车故障、EPU保护性停车故障和降级故障;
控制命令输出模块,用于针对不同的故障类型输出对应的控制命令,所述控制命令是:仅禁止相关组件、起动模式的控制功能,同时允许无关组件的持续运行。
可选地,所述针对不同的故障类型输出对应的控制命令,具体是:
a)当发生地面气源保护性停车故障时,APU会停车,但仅禁止地面气源模式起动APU,允许其余模式的起动;
b)当发生地面贫油保护性停车故障时,APU会停车,但仅禁止地面贫油模式起动APU,允许其余模式的起动;
c)当发生左ATS保护性停车故障时,则除左ATS外的其余组件持续运行,且仅禁止左ATS起动,允许其余模式的起动;
d)当发生右ATS保护性停车故障时,则除右ATS外的其余组件持续运行,且仅禁止右ATS起动,允许其余模式的起动;
e)当发生空中保护性停车故障时,APU会停车,但仅禁止空中模式起动APU,允许其余模式的起动;
f)当发生EPU保护性停车故障时,仅禁止EPU起动,允许其余模式的起动;
g)当发生降级故障时,系统持续运行。
可选地,该控制系统还包括:故障标识生成模块,用于获取故障分析模块的分析结果,产生相应的故障标识。
可选地,该控制系统还包括:故障信息处理模块,用于根据所述故障标识生成故障字后发送给上级系统。
本发明还相应提出一种计算机设备,包括处理器和存储器,所述存储器存储有若干程序,其特殊之处在于,所述程序被处理器加载运行时实现上述的一种缓慢任务降级的辅助动力系统保护性停车控制方法。
本发明还相应提出一种计算机可读存储介质,存储有若干程序,其特殊之处在于,所述程序被处理器加载运行时实现上述的一种缓慢任务降级的辅助动力系统保护性停车控制方法。
相比现有技术,本发明具有以下优点:
本发明在辅助动力系统发生故障时直接分析故障类型,并根据故障类型区分不同的保护性停车进行分离控制,仅禁止必要组件运行,允许无关组件持续工作,保证了系统工作的最大允许能力,从而增强了辅助动力系统实际运行的稳定性和工作能力。
附图说明
图1为本发明的原理示意图。
图2为故障判断、分析以及上报的一个实施例。
图3本发明的一个测试实例的环境测试设备运行图。
图4本发明的另一个测试实例的环境测试设备运行图。
具体实施方式
以下结合附图通过实施例对本发明进一步详述。
本实施例针对传统辅助动力系统保护性停车统一控制的弊端,设计了一种缓慢任务降级的辅助动力系统保护性停车控制方法。预先根据故障条目对故障进行分类,具体包括地面气源保护性停车、地面贫油保护性停车、左ATS保护性停车、右ATS保护性停车、空中保护性停车、EPU保护性停车和降级故障。
如图1所示,该控制方法包括:
步骤1)判断辅助动力系统是否发生故障;
当某一/某些组件或起动模式发生故障时,该组件或起动模式自然也就发生了保护性停车;传统方案是在该组件/起动模式自然发生保护性停车的同时,统一自动控制实现完全停车(APU停车),然后识别和分析系统故障,待排除故障后,再重启系统恢复正常状态继续运行。而本发明实施例并不完全停车(APU停车),而是在此时即分析确定保护性停车的故障类型并据此作针对性的处理,见以下步骤;这里,将起动模式分为地面气源模式、地面贫油模式、空中模式和EPU模式;
步骤2)分析确定保护性停车的故障类型;所述故障类型分为地面气源保护性停车故障、地面贫油保护性停车故障、左ATS保护性停车故障、右ATS保护性停车故障、空中保护性停车故障、EPU保护性停车和降级故障;这里,降级故障是指认定的不影响系统起动的故障;
步骤3)针对不同的故障类型,仅禁止相关组件、起动模式的控制功能,同时允许无关组件的持续运行。具体来说:
a)当发生地面气源保护性停车故障时,APU会停车,但此时仅禁止地面气源模式起动APU,允许其余模式的起动;
b)当发生地面贫油保护性停车故障时,APU会停车,但此时仅禁止地面贫油模式起动APU,允许其余模式的起动;
c)当发生左ATS保护性停车故障时,则除左ATS外的其余组件持续运行,且仅禁止左ATS起动,允许其余模式的起动;
d)当发生右ATS保护性停车故障时,则除右ATS外的其余组件持续运行,且仅禁止右ATS起动,允许其余模式的起动;
e)当发生空中保护性停车故障时,APU会停车,但此时仅禁止空中模式起动APU,允许其余模式的起动;
f)当发生EPU保护性停车故障时,APU可能会停车也可能不停车(取决于发生EPU故障的时机,例如若发生EPU故障时APU的运行已经不再需要EPU辅助,则APU并不会停车);但此时仅禁止EPU起动,允许其余模式的起动;
g)当发生降级故障时,系统持续运行(并不禁止上述组件、起动模式)。
进一步地,如图2所示,在步骤2)分析确定保护性停车的故障类型后,还产生相应的故障标识,然后根据故障标识生成故障字,上报上级系统。
另外,参考图1、图2,本发明也提出一种辅助动力系统保护性停车控制系统,包括:
系统状态判断模块,用于判断辅助动力系统是否发生故障;
故障分析模块,用于分析确定保护性停车的故障类型;所述故障类型分为地面气源保护性停车故障、地面贫油保护性停车故障、左ATS保护性停车故障、右ATS保护性停车故障、空中保护性停车故障、EPU保护性停车故障和降级故障;
控制命令输出模块,用于针对不同的故障类型输出对应的控制命令,所述控制命令是:仅禁止相关组件、起动模式的控制功能,同时允许无关组件的持续运行(具体如前所述)。
进一步地,该控制系统还包括:故障标识生成模块,用于获取故障分析模块的分析结果,产生相应的故障标识;以及故障信息处理模块,用于根据所述故障标识生成故障字后发送给上级系统。
测试实例一(图3)
针对某型辅助动力系统电子控制器,对上述方法进行功能性能可靠性验证。在环境测试设备上注入EPU保护性停车故障,通过地面气源模式起动APU并运行左ATS,若能够起动,表明实现了该控制方法。
测试实例二(图4)
针对某型辅助动力系统电子控制器,对上述方法进行功能性能可靠性验证。在环境测试设备上注入右ATS保护性停车故障,通过空中模式起动APU,若能够起动,表明实现了该控制方法。
- 一种缓慢任务降级的辅助动力系统保护性停车控制方法
- 一种辅助动力系统电子控制器排气门组件控制方法