一种无人机外嵌式应急智能安全防护装置及运行控制方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及一种无人机外嵌式应急智能安全防护装置及运行控制方法。
背景技术
随着我国无人机产业迅猛发展,无人机的应用领域也越来越广泛。无人机飞行的过程中,若出现异常情况(如炸机)而自动掉落时,如果不对此进一步处理,可能会导致无人机损坏或造成第三方损害,近年来随着无人机的大量应用,从而导致因无人机坠落和丢失事故造成的人身伤害和财产损失呈几何倍数增长。因此,如何在无人机发生异常情况后,实现无人机的安全降落是一个亟待解决的问题。
发明内容
本发明的目的在于提供一种无人机外嵌式应急智能安全防护装置及运行控制方法,利用该运行控制方法,可独立的实现无人机飞行姿态的实时监测,当在无人机出现异常情况而发生坠落时,利用该安全防护装置可实现无人机的安全降落,继而避免发生坠机损坏现象的发生,进一步地,该安全防护装置在防护过程中,可实现旋翼无人机螺旋桨的转动限位,继而可避免螺旋桨转动伤人事故的发生。
本发明解决其技术问题所采取的技术方案是:一种无人机外嵌式应急智能安全防护装置,包括固定盘、转动盒、转动驱动机构、转动起始定位机构、弹簧和降落伞,所述转动盒包括转动盒本体和端盖,固定盘设置在所述转动盒本体下部,且转动盒本体可相对于固定盘在α角度范围内转动,所述转动驱动机构用于驱动转动盒本体相对于所述固定盘转动;所述转动起始定位机构设置在所述固定盘上,转动起始定位机构用于将转动盒本体限制定位在转动起始位置,降落伞和弹簧通过端盖依次上下封闭在转动盒本体内,且弹簧处于压缩状态,降落伞周边拉绳与固定盘固定连接,当转动盒本体处于转动起始位置时,端盖被固定卡置在转动盒本体上,当转动盒本体转动一定角度后,弹簧可将端盖从转动盒本体上弹开。
优选地,该安全防护装置还包括电源和控制电路板,所述电源为所述控制电路板提供电源,所述控制电路板为所述转动起始定位机构提供电源,所述控制电路板包括MCU模块、IMU模块和通讯模块,MCU模块、IMU模块和通讯模块之间可进行数据传递。
优选地,在所述固定盘中部设置一第一安装孔,在所述固定盘的上部外边缘处设置有三个沿着第一安装孔的圆周方向等间距分布的限位架,在所述转动盒本体的底板上设置一与所述第一安装孔相对应的第二安装孔,在所述第二安装孔内套置一横截面积呈T形的固定压座,且固定压座的底部与所述第一安装孔的周边固定连接,所述转动盒本体可相对于固定压座自由转动,在所述转动盒本体的底板上设置有三个与三个所述限位架一一对应的第一弧形导向限位滑槽,且限位架套置在相应的第一弧形导向限位滑槽内。
进一步地,在所述端盖的下部设置有与所述限位架相对应的第一卡接构件,且限位架可实现第一卡接构件的转动限位,在所述转动盒本体的内侧壁上设置有与所述第一卡接构件相对应的第二卡接构件,当转动盒本体处于转动起始位置时,所述第二卡接构件实现对第一卡接构件的上下限位,当转动盒本体带动第二卡接构件转动一定角度后,所述第二卡接构件解除对第一卡接构件的上下限位。
进一步地,所述第一卡接构件为一﹂形构件,在所述限位架的上部设置有与所述﹂形构件的下部相对应的第一卡槽,当﹂形构件的下部卡置在第一卡槽内时,第一卡槽实现对﹂形构件的转动限位,所述第二卡接构件为一﹁形构件,当转动盒本体处于转动起始位置时,所述﹁形构件卡置在﹂形构件内。
进一步地,所述转动驱动机构为一扭簧,在所述固定压座中部设置一第三安装孔,在所述固定压座的上压板上设置一与第三安装孔相贯通的定位卡槽,在所述转动盒本体的底板上设置一定位杆,且在固定盘上设置有用于定位杆转动活动的活动槽,活动槽与第一安装孔相贯通,定位杆的下部位于所述活动槽内,所述扭簧套置在第三安装孔内,且扭簧的上拨杆卡置在所述定位卡槽内,所述扭簧的下拨杆卡置在定位杆的下端,当转动盒本体处于转动起始位置时,通过定位卡槽和定位杆对上拨杆和下拨杆的定位作用,使得扭簧处于旋转压缩状态。
优选地,在所述固定盘上设置有两个定位柱,在转动盒本体的底板上设置有两个与所述定位柱相对应的第二弧形导向限位滑槽,且定位柱套置在第二弧形导向限位滑槽内,所述转动起始定位机构包括固定盒、定位销、推动弹簧和舵机,所述固定盒固定设置在两个所述定位柱上,所述定位销竖直卡置在固定盒内部一侧,且定位销可相对于固定盒上下自由活动,在所述转动盒的底板上设置一与所述定位销相配合的第一定位孔,在所述固定盘上设置一与所述定位销相对应的第二定位孔,当定位销的下端插入在第一定位孔和第二定位孔内后,使得转动盒本体定位在转动起始位置,所述推动弹簧套置在定位销上部,且推动弹簧始终对定位销施加一个向下的推力,所述舵机设置在所述固定盒外部一侧,且舵机的转动轴位于所述固定盒内,在所述定位销上设置一横杆,在所述舵机的转动轴上固定设置一位于横杆下方的推杆,当推杆转动时,推杆可通过推动横杆实现定位销的下端从第二定位孔和第一定位孔内的拔出。
进一步地,在所述转动盒本体的外侧固定设置一防旋翼机转动机构,所述防旋翼机转动机构包括四个阻挡杆,当转动盒本体处于转动起始位置时,阻挡杆不妨碍旋翼无人机的旋翼螺旋桨的转动,当转动盒本体转动α角度后,阻挡杆妨碍旋翼无人机的旋翼螺旋桨的转动。
优选地,在所述固定盘的底部设置有用于将固定盘固定在无人机上的卡接固定机构,所述卡接固定机构包括第一连接支耳、第二连接支耳、第一捆扎带和第二捆扎带,所述第一连接支耳和第二连接支耳相对设置在所述固定盘的底部,所述第一捆扎带的一端与所述第一连接支耳相连接,所述第二捆扎带的一端与所述第二连接支耳相连接,所述第一捆扎带的另一端与所述第二捆扎带的另一端活动连接。
本发明还提供了一种无人机外嵌式应急智能安全防护装置的运行控制方法,包括如下步骤:在无人机飞行过程中,IMU模块实时监测无人机飞行过程中的角速度和加速度数据,并将监测的数据实时传递给所述MCU模块,MCU模块在接收到数据后,采用IIR数字滤波原理实时更新四元数,继而实现无人机飞行姿态的实时监测,MCU经过数据处理后,将无人机飞行姿态相关数据与MCU内设定相关阈值相比较,当相关数据超越设定阈值时,说明无人机已处于炸机状态,MCU模块判断出无人机处于炸机状态后,则立即启动所述舵机44,继而使得降落伞打开,从而实现了无人机的伞降保护,同时,MCU模块在判断出无人机处于炸机状态后,立即启动通讯模块,使得通讯模块向无人机地面操控者发送GPS定位信息,继而使得无人机地面操控者依据GPS信号找到无人机伞降位置。
本发明的有益效果是:本发明各构件机构及各构件组合方式设计巧妙,使得本装置整体体积较小,重量也较轻,继而便于本发明在无人机上的安装与固定;本发明内除了舵机为电子产品外,其余构件均为机械构件,从而大大降低了本发明发生故障的几率,为本发明的安全可靠工作提供了保障;本发明中,利用扭簧作为固定盘和转动盒的转动驱动构件,其结构简单,故可保障转动盒的转动稳定性;限位架、第一卡接构件和第二卡接构件的卡合配合灵活稳定,从而可确保降落伞的收集放置及快速稳定展开,提高了降落伞使用可靠性;利用弹簧作为降落伞弹射展开构件,因弹簧响应速度快,使得降落伞的展开响应速度快,继而使得降落伞在无人机发生异常后,第一时间内为无人机提供降落防护;利用本发明提供的运行控制方法,可独立于无人机飞控操控系统而实现无人机飞行姿态的实时监控,且监测数据处理精确,在实时监测过程中,该运行控制方法能够在第一时间内判断出无人机出现炸机情况,并立即启动伞降防护系统,继而实现无人机炸机事故的伞降保护,在无人机出现炸机后,通讯模块可向无人机地面操控人员发送GPS定位信息,使得操控人员能够顺利实现无人机的回收。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的部分优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
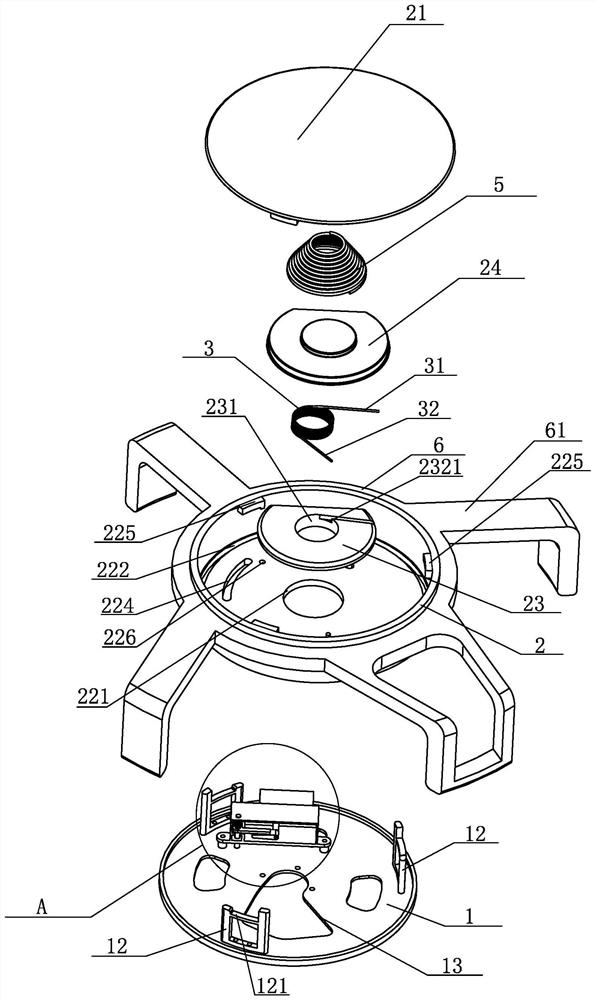
图1为本发明的整体结构组合示意图;
图2为本发明的转动盒的内部结构示意图;
图3为本发明的整体结构示意图;
图4为端盖的整体结构示意图;
图5为转动盒本体的底部侧视图;
图6为固定盘的整体结构示意图;
图7为扭簧与转动盒本体和固定盘相结合示意图;
图8为固定压座的整体结构示意图;
图9为限位架、第一卡接构件和第二卡接构件卡合在一起的状态示意图;
图10图1中A处放大图;
图11为本发明运行控制流程图;
图中:1固定盘、11第一安装孔、12限位架、121第一卡槽、122螺纹孔、13活动槽、14定位柱、15第二定位孔、16第一连接支耳、17第二连接支耳、2转动盒、21端盖、211第一卡接构件、22转动盒本体、221第二安装孔、222第一弧形导向限位滑槽、223定位杆、224第二弧形导向限位滑槽、225第二卡接构件、226第一定位孔、23固定压座、231第三安装孔、232上压板、2321定位卡槽、24弹簧安装座、3扭簧、31上拨杆、32下拨杆、41固定盒、42定位销、421横杆、43推动弹簧、44舵机、441拨杆、5弹簧、6防旋翼机转动机构、61阻挡杆。
具体实施方式
下面将结合具体实施例及附图1-11,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分优选实施例,而不是全部的实施例。本领域技术人员可以在不违背本发明内涵的情况下做类似变形,因此本发明不受下面公开的具体实施例的限制。
本发明提供了一种无人机外嵌式应急智能安全防护装置(如图1所示),包括固定盘1、转动盒2、转动驱动机构、转动起始定位机构、弹簧5和降落伞(为保持附图清晰,未将其在附图中画出),所述转动盒2包括转动盒本体22和端盖21,固定盘1设置在所述转动盒本体22下部,且转动盒本体22可相对于固定盘1在α角度范围内转动,在本具体实施例中,固定盘1与转动盒本体22转动连接的具体实施方式为:在所述固定盘1中部设置一第一安装孔11,在所述固定盘1的上部外边缘处设置有三个沿着第一安装孔11的圆周方向等间距分布的限位架12,在所述转动盒本体22的底板上设置一与所述第一安装孔11相对应的第二安装孔221,在所述第二安装孔221内套置一横截面积呈T形的固定压座23,且固定压座23的底部与所述第一安装孔11的周边固定连接,在本具体实施例中,在固定压座23上设置有若干通孔,在第一安装孔11的周边设置有与固定压座23上设置的通孔相对应的通孔,通过螺栓贯穿固定压座23上的通孔和第一安装孔11周边的通孔,实现固定压座23与固定盘1的固定连接,所述转动盒本体22可相对于固定压座23自由转动,在所述转动盒本体22的底板上设置有三个与三个所述限位架12一一对应的第一弧形导向限位滑槽222,且限位架12套置在相应的第一弧形导向限位滑槽222内,为便于实现限位架12在第一弧形导向限位滑槽222内顺利稳定滑动,在此,可将限位架12设计成弧形状,通过限位架12对第一弧形导向限位滑槽222的限位,可使得转动盒本体22在α角度范围内转动,在实际应用中,α的数值范围为40°≤α≤60°,在本具体实施例中,优选地,将α的值设置为45°。
所述转动驱动机构用于驱动转动盒本体22相对于所述固定盘1转动,在本具体实施例中,为降低转动驱动机构的设计成本及机构自身重量,在此,将转动驱动机构设置为一扭簧3,扭簧3实现转动盒本体22相对于固定盘1转动的具体实施方式为:在所述固定压座23中部设置一第三安装孔231,在所述固定压座23的上压板231上设置一与第三安装孔231相贯通的定位卡槽2321,在所述转动盒本体22的底板上设置一定位杆223,且在固定盘1上设置有用于定位杆223转动活动的活动槽13,活动槽13与第一安装孔11相贯通,定位杆223的下部位于所述活动槽13内,所述扭簧3套置在第三安装孔231内,且扭簧3的上拨杆31卡置在所述定位卡槽2321内,所述扭簧3的下拨杆32卡置在定位杆223的下端,当转动盒本体22处于转动起始位置时,通过定位卡槽2321和定位杆223对上拨杆31和下拨杆32的定位作用,使得扭簧3处于旋转压缩状态,当转动盒本体22的转动限位被解除后,扭簧3可通过拨动定位杆223,实现转动盒本体22相对于固定盘1的转动。
所述转动起始定位机构设置在所述固定盘1上,转动起始定位机构用于将转动盒本体22限制定位在转动起始位置,在本具体实施例中,转动起始定位机构的具体实施方式为:在所述固定盘1上设置有两个定位柱14,在转动盒本体22的底板上设置有两个与所述定位柱14相对应的第二弧形导向限位滑槽224,且定位柱14套置在第二弧形导向限位滑槽224内,第二弧形导向限位滑槽224相对于定位柱14的转动范围也为α,所述转动起始定位机构包括固定盒41、定位销42、推动弹簧43和舵机44,所述固定盒41固定设置在两个所述定位柱14上,所述定位销42竖直卡置在固定盒41内部一侧,且定位销42可相对于固定盒41上下自由活动,在所述转动盒的底板22上设置一与所述定位销42相配合的第一定位孔226,在所述固定盘1上设置一与所述定位销42相对应的第二定位孔15,当定位销42的下端插入在第一定位孔226和第二定位孔15内后,使得转动盒本体22定位在转动起始位置,所述推动弹簧43套置在定位销42上部,且推动弹簧43始终对定位销42施加一个向下的推力,所述舵机44设置在所述固定盒41外部一侧,且舵机44的转动轴位于所述固定盒41内,在所述定位销42上设置一横杆421,在所述舵机44的转动轴上固定设置一位于横杆421下方的推杆441,当推杆441转动时,推杆441可通过推动横杆421实现定位销42的下端从第二定位孔15和第一定位孔226内的拔出。在实际应用过程中,当定位销42插接在第一定位孔226和第二定位孔15内时,扭簧3处于旋转压缩状态,转动盒本体22被限制在旋转初始位置,当定位销42从第一定位孔226和第二定位孔15拔出后,转动盒本体22的转动限制解除,从而在扭簧3的推动下实现转动,当转动盒本体22转动到位后,在反转旋转转动盒本体22的过程中,当第一定位孔226与第二定位孔15再次重合后,定位销42在推动弹簧43的推动下,再次插入到第一定位孔226和第二定位孔15内,从而再次实现了转动盒本体22的旋转起始限位,在反转转动盒本体22的过程中,扭簧3逐渐被旋转压缩,从而使得扭簧3重新获得拨动能量。
降落伞和弹簧5通过端盖21依次上下封闭在转动盒本体22内,且弹簧5处于压缩状态,降落伞周边拉绳与固定盘1固定连接,当转动盒本体处22于转动起始位置时,端盖21被固定卡置在转动盒本体22上,当转动盒本体22转动一定角度后,弹簧5可将端盖21从转动盒本体22上弹开,在本具体实施例中,为便于实现弹簧5在转动盒本体22内的定位,在此,在所述固定压座23的上部扣置一弹簧安装座24,所述弹簧5的底部套置在弹簧安装座24上,所述降落伞设置在所述转动盒本体22内,降落伞周边通过若干拉绳与限位架12固定连接,且弹簧5位于降落伞下部,降落伞的拉绳与限位架12连接固定的具体实施方式为:在限位架12上设置有两个螺纹孔122,在螺纹孔122内设置有螺钉,拉绳栓置固定在螺钉上。
当所述端盖21扣置在所述转动盒本体22上部时,所述弹簧5处于压缩状态,为便于实现端盖21定位对弹簧5的压缩,在本具体实施例中,端盖21、转动盒本体22和限位架12之间的具体实施方式为:在所述端盖21的下部设置有与所述限位架12相对应的第一卡接构件211,且限位架12可实现第一卡接构件211的转动限位,在所述转动盒本体22的内侧壁上设置有与所述第一卡接构件211相对应的第二卡接构件225,当转动盒本体22处于转动起始位置时,所述第二卡接构件225实现对第一卡接构件211的上下限位,第一卡接构件211被上下限位后,端盖21实现上下固定,从而实现其对弹簧5的压缩,使得弹簧5处于压缩状态;当转动盒本体22带动第二卡接构件225转动一定角度(此角度的数值小于α的数值)后,所述第二卡接构件225解除对第一卡接构件211的上下限位,当第二卡接构件225解除对第一卡接构件211的上下限位后,端盖21在上下方向处于自由状态,从而使得弹簧5的活动端可自由弹射,弹簧5在弹射过程中,将降落伞和端盖21同步弹出,从而便于实现降落伞的打开,进一步地,限位架12、第一卡接构件211和第二卡接构件225三者实现卡合的具体实施方式为:所述第一卡接构件211为一﹂形构件,在所述限位架12的上部设置有与所述﹂形构件的下部相对应的第一卡槽121,当﹂形构件的下部卡置在第一卡槽121内时,第一卡槽121实现对﹂形构件的转动限位,从而在转动盒本体22转动过程中,可防止转动盒本体22带动端盖21同步转动,所述第二卡接构件225为一﹁形构件,当转动盒本体22处于转动起始位置时,所述﹁形构件卡置在﹂形构件内,通过﹁形构件对﹂形构件的上下限位,从而在转动盒本体22处于转动初始位置时,防止弹簧5将降落伞和端盖21弹出。
在将本发明用于旋翼无人机的安全防护时,当旋翼无人机出现异常而发生坠落式,为防止转动的螺旋桨发生转动伤人现象,在此,在转动盒本体22的外侧固定设置一防旋翼机转动机构6,所述防旋翼机转动机构包括四个阻挡杆61,当转动盒本体22处于转动起始位置时,阻挡杆61不妨碍旋翼无人机的旋翼螺旋桨的转动,当转动盒本体22转动α角度后,阻挡杆61妨碍旋翼无人机的旋翼螺旋桨的转动,阻挡杆61将螺旋桨挡住,从而使得螺旋桨不能再继续转动,继而不会发生螺旋桨转动伤人现象。
为便于实现本发明在无人机上的安装与固定,在此,在固定盘1的底部设置有用于将固定盘1固定在无人机上的卡接固定机构,在本具体实施例中,卡接固定机构的具体实施方式为:所述卡接固定机构包括第一连接支耳16、第二连接支耳17、第一捆扎带和第二捆扎带,为便于保持附图清晰,未在附图中将第一捆扎带和第二捆扎带画出,所述第一连接支耳16和第二连接支耳17相对设置在所述固定盘1的底部,所述第一捆扎带的一端与所述第一连接支耳16相连接,所述第二捆扎带的一端与所述第二连接支耳17相连接,所述第一捆扎带的另一端与所述第二捆扎带的另一端活动连接,在实际应用中,通过第一捆扎带和第二捆扎带之间的拉紧实现固定盘1在无人机上的固定。
在实际应用中,为进一步提高本发明的在无人机上的灵活应用,使得本发明相对与无人机是一个与无人机毫无关联的独立运行控制单元,在此,在该防护装置内还设置有电源和控制电路板,所述电源为所述控制电路板提供电源,所述控制电路板为所述转动起始定位机构提供电源,所述控制电路板包括MCU模块、IMU模块和通讯模块,MCU模块与IMU模块和通讯模块之间可进行数据传递,IMU模块用于实时监测无人机飞行时的各项飞行数据,如飞行的加速度和角速度,MCU模块则用于实时处理IMU模块输送的实时飞行数据,并将数据与设定阈值进行实时比较,MCU模块和IMU模块均为本领域内常用数据处理及监测单元,故对于MCU模块和IMU模块的详细结构及运行原理不再做详细说明,通讯模块采用无线通信技术实现无人机与操控人员的无线对接;进一步地,从系统可靠性保护出发,可对IMU模块进行冗余设计,即设计两个IMU模块,当一个IMU模块出现问题时,另一个IMU模块仍可正常工作,继而持续实现无人机安全防护监测。
本发明还提供了一种无人机外嵌式应急智能安全防护装置的运行控制方法,包括如下步骤:在无人机飞行过程中,IMU模块实时监测无人机飞行过程中的角速度和加速度数据,并将监测的数据实时传递给所述MCU模块,MCU模块在接收到数据后,采用IIR数字滤波原理实时更新四元数,并将更新的四元数实时与MCU内设定相关阈值相比较,继而实现无人机飞行姿态的实时监测,当实时更新的四元数超过MCU内设定的阈值时,此时,说明无人机处于炸机状态,在实际应用中,可以无人机飞行时的Z轴偏转角度在一定时间内持续大于设定阈值为判断条件,来实现无人机炸机判断条件,MCU模块判断出无人机处于炸机状态后,则立即启动所述舵机44,继而使得降落伞打开,从而实现了无人机的伞降保护,同时,MCU模块在判断出无人机处于炸机状态后,立即启动通讯模块,使得通讯模块向无人机地面操控者发送GPS定位信息,继而使得无人机地面操控者依据GPS信号找到无人机伞降位置。
舵机44的启动实现降落伞弹射展开的过程为:本发明在工作初始状态时,扭簧3处于压缩状态,定位销42插接在第一定位孔226和第二定位孔15内,弹簧5和降落伞被端盖21密封在转动盒本体22内,且端盖21上的第一卡接构件的下部卡置在第一卡槽121内,第二卡接构件225卡置在第一卡接构件211的上方。当舵机44接收到启动信号后,舵机44开始带动推杆441转动,推杆441的转动继而推动横杆421向上移动,横杆421的向上移动继而带动定位销42逐渐从第一定位孔15和第二定位孔226内抽出,当定位销42完全从第一定位孔15和第二定位孔226内抽出后,则转动盒本体22在扭簧3的推动下开始转动,在转动盒本体22转动过程中,因第一卡接构件211受到限位架12的限位作用,从而使得端盖21不发生转动,在第二卡接构件225随着转动盒本体22的不断转动,当第二卡接构件225从第一卡接构件211上方闪开后,降落伞和端盖21在弹簧5的推动下,继而从转动盒本体22内弹出,降落伞被弹出后,在无人机下降过程中,通过风力的作用迅速展开,继而实现无人机的缓慢降落,从而实现无人机的伞降,无人机的伞降功能,则提高了小型无人机的飞行安全水平,让使用者更便利、安全地使用无人机,同时,无人机的伞降则有效避免小型无人机失控坠落给地面人员和财产造成损失。
本发明中,“上”、“下”均是为了方便描述位置关系而采用的相对位置,因此不能作为绝对位置理解为对保护范围的限制。
除说明书所述的技术特征外,均为本专业技术人员的已知技术。
以上所述结合附图对本发明的优选实施方式和实施例作了详述,但是本发明并不局限于上述实施方式和实施例,对于本技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
- 一种无人机外嵌式应急智能安全防护装置及运行控制方法
- 一种无人机外嵌式应急智能安全防护装置