一种具备自主飞行能力的飞行阵列系统
文献发布时间:2023-06-19 10:13:22
技术领域
本发明属于无人机技术领域,具体涉及一种具备自主飞行能力的飞行阵列系统。
背景技术
无人机的发展和应用已经引起了各国的高度重视,人们对无人机的环境适应性、工作领域提出了更高的要求。将执行复杂功能的无人机进行模块化设计,利用模块化的特点实现一些整体设计难以满足的指标逐渐成为各国研究的重点。结合模块化设计实现整体系统的功能模块化,并将功能载荷设计装载于单个模块中,然后通过结构设计实现单载荷的自主飞行能力,以应对起飞空间有限的环境,这将极大的丰富飞行阵列的应用场景与功能。为此需要一种具有新型的飞行阵列单模块无人机,能够完成的任务包括:自主飞行、载荷适装、稳定对接、模块信息交互等能力。
传统分布式飞行阵列单模块无人机大多采用地面组装,单模块无人机采用两套动力系统:单旋翼,为飞行提供动力;地面轮系统,控制多模块地面组装形成阵列。这种单模块无人机的缺点在于应用场景受限。由于不具备单独飞行能力,需要在陆地组装成飞行阵列才能执行飞行任务,需要较大的起飞空间。
在此基础上发展的共轴旋翼模式,具备一定飞行能力。尽管该设计可以令无人机具备一定的飞行能力,但没有姿态调整结构。所以无人机不具备完整的飞行能力,不能完成空中姿态调整任务,无法对接,仍需地面组装。
在上述基础上发展的共轴旋翼结合操纵舵的设计,将空中的姿态由操纵舵机构实现,这种结构可以解决无人机缺少自主飞行能力的缺点,具备完整的姿态调节能力。但由于操纵舵的调整具有一定的滞后性,空中姿态不灵活。占据的竖直空间也更大,在狭小空间布置数量有限,故这种设计的模块化思想主要应用于单模块无人机,对于起飞空间要求较大。
此外,上述的方案设计的飞行系统负载能力有限,单模块无人机的大部分空间被动力系统占据,负载能力有限不能搭载多种载荷完成系统性功能的能力,且不具狭小空间起飞的基本条件。
发明内容
本发明旨在突破传统飞行阵列起飞空间大,条件受限,载荷能力弱以及续航时间不足的限制,提供一种占据空间小、具有高负载能力以及姿态调整灵活,并且能够在狭小空间内以层叠方式起飞的自主飞行阵列模块。
为实现以上目的,一种具备自主飞行能力的飞行阵列系统:其特征是:飞行阵列模块的单模块无人机至少包括:全矢量动力单元、机体模块、负载模块;
所述的全矢量动力单元用于提供单模块无人机的飞行动力与姿态调整动力,飞行动力通过共轴螺旋桨实现,姿态调整通过并联舵机实现,矢量内环控制单模块无人机的横移动作,矢量外环控制单模块无人机的前进后退;
所述的机体模块用于搭建单模块无人机外壳,一架单模块无人机外壳由六个相同的机体模块按照一定规则进行拼接固定,单模块无人机外壳为全矢量动力机构与负载模块提供固定点,并承担一定的外壳防水性与耐压性,机体模块的零件上设置有很多标准螺纹连接孔,通过该螺纹连接孔与其他模块进行连接,另外,其余螺纹连接孔密封保持防水性与耐压性;
所述的负载模块用于实现单模块无人机的特定功能,要求负载模块满足载荷舱段的外形,负载模块包括但不局限于雷达、红外光电摄像头、卫星收发通信装置以及燃料电池等;全矢量机构通过外环舵机控制矢量外环产生角度倾斜进而控制无人机的纵向姿态以及纵向的位置稳定,通过内环舵机控制矢量内环产生角度倾斜进而控制单模块无人机的横向姿态以及横向的位置稳定,同时,通过测量来自姿态传感器结算出来的数据,控制共轴矢量电机产生的升力与重力共线;负载模块一共可以搭载六块,这六块按功能包含但不局限于如下功能:雷达载荷、光电载荷、通信载荷、能源载荷以及其他功能载荷,单模块无人机可以通过替换这六块载荷来实现不同的功能,最终通过空中阵列组装进而实现更为复杂的功能。
所述的全矢量动力单元包括:螺旋桨(102)、无刷电机(101)、无刷电机座(103)、舵机座(104)、舵机(105)、矢量外环(106)、矢量内环(107)、矢量臂(108)、轴承座(109)、轴承(110)、舵机臂(111)、机构连接底座(112)、固连杆(113);全矢量动力单元(1)通过机构连接底座(112)与机体模块(2)连接,同时其上安装有两个舵机(105),通过舵机臂(111)与矢量臂(108)固连,矢量臂(108)通过轴承(110)固定在轴承座(109)上,轴承座(109)通过固连杆(113)固连在机构连接底座(112)上,这一部分作为矢量操作的外环控制无人机纵向姿态;两个矢量臂(108)与矢量外环固连,并且在其上固定舵机座(104),两个舵机(105)安装于矢量外环(106)与舵机座(104)形成的安装空间内,舵机(105)通过舵机臂(111)与矢量内环(107)固连,矢量内环上下共安装有两个无刷电机座(103);布置在上方的无刷电机(101)安装正螺旋桨(102),布置在下方的无刷电机(101)安装逆螺旋桨(102);上方的电机顺时针旋转、下方的电机逆时针旋转;当两者转速相同时,产生的转矩相互抵消;当两者具有一定转速差时:上方转矩>下方转矩:整机产生顺时针旋转;当上方转矩<下方转矩:整机产生逆时针旋转;舵机(105)包括两个,是单模块无人机的水平面上的纵向姿态稳定以及纵向位移的动力源,舵机臂(111)与矢量臂(108)固连,矢量臂(108)通过轴承(110)固定在轴承座(109)上,轴承座(109)通过固连杆(113)固连在机构连接底座(112)上,这一部分作为矢量操作的外环控制单模块无人机纵向姿态,通过外环舵机控制矢量外环(106)产生角度倾斜进而控制单模块无人机的纵向姿态以及纵向的位置稳定。
所述的全矢量动力机构(1)通过外环舵机控制矢量外环(106)产生角度倾斜进而控制单模块无人机的纵向姿态以及纵向的位置稳定,通过内环舵机控制矢量内环(107)产生角度倾斜进而控制单模块无人机的横向姿态以及横向的位置稳定,同时,通过测量来自姿态传感器结算出来的数据,控制共轴矢量电机产生的升力与重力共线;一架单模块无人机由六个相同的机体模块(2)构成,内部空间呈圆形,由30片拼接片(201)组成,每个机体模块(2)有5片,通过缺口与直角连接片(205)固定于上下底板(202)之间;上下底板通过缺口与其他零件相连;外壳板(204)作为无人机的外壳部分,一架单模块无人机有六个该结构,外壳板(204)分布在外侧,间隔板通过直角连接片(205)连接在上下底板(202)之间,模块机体之间通过上下底板(202)上的凸起与凹陷结构以及平角连接片(207)和外壳板上的钝角连接片(206)相连。
所述的机体模块(2)包括:圆环拼接片(201)、底板(202)、分隔板(203)、外壳板(204)、直角连接片(205)、钝角连接片(206)、平角连接片(207);下底板(202)通过连接缺口与其他模块进行固连,下底板(202)直线边连接外壳板(204),外壳板(204)通过外壳凹陷(2025)和底板凸起(2042)扣合于下底板(202)直线边,保证结构的校准,然后通过三个直角连接片(205)与M3螺纹连接固定于下底板(202)上;下底板(202)圆弧边连接拼接片(201),圆弧边上分布有五个拼接片凹陷(2021),拼接片(201)通过拼接片凸起(2011)扣合圆弧边拼接片凹陷(2021),起到位置锁定的作用,然后每一个拼接片(201)通过一个直角连接片(205)与M3螺纹连接固定于下底板(202)上;在下底板圆弧边与直线边之间的两个间隔板接口(2024)安装间隔板(203),并分别通过两片M3螺纹连接固连;上底板(202)通过上述相同的方式与拼接片(201)、间隔板(203)与外壳板(204)对准,连接方式同样采用直角连接片(205)与M3螺纹连接。
所述的负载模块(3)在物理上分为六个载荷舱段,分别是第一载荷舱段(301)、第二载荷舱段(302)、第三载荷舱段(303)、第四载荷舱段(304)、第五载荷舱段(305)、第六载荷舱段(306),第一载荷舱段(301)、第二载荷舱段(302)、第三载荷舱段(303)、第四载荷舱段(304)、第五载荷舱段(305)、第六载荷舱段(306)均匀分布在环形无人机的舱段内,六个载荷舱段中间的无人机舱分布着对接装置。
与现有技术相比,本发明具有以下优点:
第一,本发明采用全矢量动力装置,单模块无人机的重心在机体下侧,通过动力与竖直方向的夹角产生的分力实现姿态的调整,因此可以获得灵活的姿态调整动作,并且具备良好的抗风性能,较为适合海上作业。
第二,本发明采用共轴螺旋桨结合外部涵道作为单模块无人机动力装置,即保证了单模块无人机的自主飞行能力,又增强了无人机的负载能力。
第三,本发明外壳采用模块化拼接技术,将整机外壳分解为六块,并进一步设计成若干结构模块,能够极大的缩减整机成本,并且具备良好的量产能力。
第四,本发明载荷模块满足载荷舱外形限制,搭载不同的模块实现不同的功能,极大的丰富了单模块无人机的应用场景,并且单模块无人机仍具备一定的自主性。
第五,模块无人机直径480mm,高度150mm,能够在狭小的空间内进行层叠式起飞。此外,狭小空间的起飞可以极大增加单模块无人机隐蔽性。
附图说明
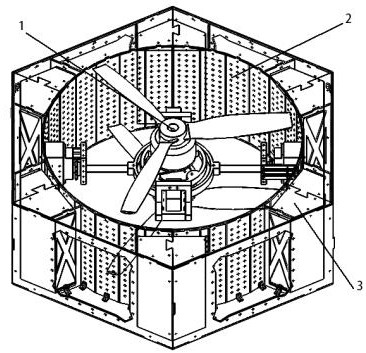
图1为本发明实施例的结构示意图;
图2A、图2B为机体模块结构主要零件平面图;
图3A、图3B为本发明机体模块结构正等轴测图;
图4为本发明矢量机构结构示意图;
图5为载荷功能及布置位置示意图;
图6为本发明的层叠起飞布置示意图。
图中:1、全矢量动力装置:101、螺旋桨;102、无刷电机;103、无刷电机座;104、舵机座;105、舵机;106、矢量外环;107、矢量内环;108、矢量臂;109、轴承座;110、轴承;111、舵机臂;112机构连接底座;113、固连杆。
2、机体模块:201、拼接片;202、底板;203、分隔板;204、外壳板;205、直角连接片;206、钝角连接片;207、平角连接片。
3、拼接片201形状特征:2011/2022、上/下拼接凸起;底板202形状特征:2021、拼接片凹陷;2022、底板凸起;2023、底板凹陷;2024、间隔板接口;2025、外壳凸起;分隔板203形状特征:2031/2032、分隔板凸起;外壳板204形状特征:2041、外壳凸起;2042/2043、上/下底板凸起;2044、外壳凹陷;
4、负载模块3:301、第一载荷舱段;302、第二载荷舱段;303、第三载荷舱段;304、第四载荷舱段;305、第五载荷舱段;306、第六载荷舱段。
5、按功能划分模块:401、主控模块;402、卫星通信模块;403、图像模块;404、雷达模块;405、能源模块。
具体实施方式
下面结合具体实例对本发明进行详细说明。以下说明有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
如图1所示,一种具备自主飞行能力的飞行阵列系统:其特征是:飞行阵列模块的单模块无人机至少包括:全矢量动力单元1、机体模块2、负载模块3;所述的全矢量动力单元1用于提供单模块无人机的飞行动力与姿态调整动力,飞行动力通过共轴螺旋桨实现,姿态调整通过并联舵机实现,矢量内环控制单模块无人机的横移动作,矢量外环控制单模块无人机的前进后退;
所述的机体模块2用于搭建单模块无人机外壳,一架单模块无人机外壳由六个相同的机体模块2按照一定规则进行拼接固定,单模块无人机外壳为全矢量动力机构与负载模块提供固定点,并承担一定的外壳防水性与耐压性,机体模块2的零件上设置有很多标准螺纹连接孔,通过该螺纹连接孔与其他模块进行连接,另外,其余螺纹连接孔密封保持防水性与耐压性;
所述的负载模块3用于实现单模块无人机的特定功能,要求负载模块满足载荷舱段的外形,负载模块包括但不局限于雷达、红外光电摄像头、卫星收发通信装置以及燃料电池等;全矢量机构通过外环舵机控制矢量外环106产生角度倾斜进而控制无人机的纵向姿态以及纵向的位置稳定,通过内环舵机控制矢量内环107产生角度倾斜进而控制单模块无人机的横向姿态以及横向的位置稳定,同时,通过测量来自姿态传感器结算出来的数据,控制共轴矢量电机产生的升力与重力共线;负载模块一共可以搭载六块,这六块按功能包含但不局限于如下功能:雷达载荷、光电载荷、通信载荷、能源载荷以及其他功能载荷,单模块无人机可以通过替换这六块载荷来实现不同的功能,最终通过空中阵列组装进而实现更为复杂的功能。
所述的全矢量动力单元1通过螺纹连接固定于机体模块2上,所述的负载模块3安装在机体模块2内部载荷舱段内,保证电气连接;所述的全矢量动力单元1用于提供无人机的飞行动力与姿态调整动力,飞行动力通过共轴螺旋桨实现,姿态调整通过并联内外环舵机实现,矢量内环控制无人机水平面上的横向动作,矢量外环控制无人机水平面上的纵向运动;所述的负载模块3用于实现模块无人机的特定功能,要求负载模块满足载荷舱段的外形.
负载模块3包括但不局限于雷达、红外光电摄像头、卫星收发通信装置以及燃料电池。
如图2A、图2B所示,全矢量动力单元1包括:螺旋桨102、无刷电机101、无刷电机座103、舵机座104、舵机105、矢量外环106、矢量内环107、矢量臂108、轴承座109、轴承110、舵机臂111、机构连接底座112、固连杆113;全矢量动力单元1通过机构连接底座112与机体模块2连接,同时其上安装有两个舵机105,通过舵机臂111与矢量臂108固连,矢量臂108通过轴承110固定在轴承座109上,轴承座109通过固连杆113固连在机构连接底座112上,这一部分作为矢量操作的外环控制无人机纵向姿态;两个矢量臂108与矢量外环固连,并且在其上固定舵机座104,两个舵机105安装于矢量外环106与舵机座104形成的安装空间内,舵机105通过舵机臂111与矢量内环107固连,矢量内环上下共安装有两个无刷电机座103。布置在上方的无刷电机101安装正螺旋桨102,布置在下方的无刷电机101安装逆螺旋桨102。上方的电机顺时针旋转、下方的电机逆时针旋转;当两者转速相同时,产生的转矩相互抵消;当两者具有一定转速差时:上方转矩>下方转矩:整机产生顺时针旋转;当上方转矩<下方转矩:整机产生逆时针旋转。
舵机105包括两个,是单模块无人机的水平面上的纵向姿态稳定以及纵向位移的动力源,舵机臂111与矢量臂108固连,矢量臂108通过轴承110固定在轴承座109上,轴承座109通过固连杆113固连在机构连接底座112上,这一部分作为矢量操作的外环控制单模块无人机纵向姿态,通过外环舵机控制矢量外环106产生角度倾斜进而控制单模块无人机的纵向姿态以及纵向的位置稳定。
所述的全矢量动力机构1通过外环舵机控制矢量外环106产生角度倾斜进而控制单模块无人机的纵向姿态以及纵向的位置稳定,通过内环舵机控制矢量内环107产生角度倾斜进而控制单模块无人机的横向姿态以及横向的位置稳定,同时,通过测量来自姿态传感器结算出来的数据,控制共轴矢量电机产生的升力与重力共线。一架单模块无人机由六个相同的模块机体2构成,内部空间呈圆形,由30片拼接片201组成,每个模块机体2有5片,通过缺口与直角连接片205固定于上下底板202之间;上下底板通过缺口与其他零件相连;外壳板204作为无人机的外壳部分,一架单模块无人机有六个该结构,外壳板204分布在外侧,间隔板通过直角连接片205连接在上下底板202之间,模块机体之间通过上下底板202上的凸起与凹陷结构以及平角连接片207和外壳板上的钝角连接片206相连。单模块无人机可以搭载六块负载模块,包含但不局限于如下功能:雷达载荷、光电载荷、通信载荷、能源载荷以及其他功能载荷,单模块无人机通过替换这六块载荷来实现不同的功能,最终通过空中阵列组装进而实现更为复杂的功能。
如图3及图4所示,模块机体2包括:圆环拼接片201、底板202、分隔板203、外壳板204、直角连接片205、钝角连接片206、平角连接片207;下底板202通过连接缺口与其他模块进行固连,下底板202直线边连接外壳板204,外壳板204通过外壳凹陷2025和底板凸起2042扣合于下底板202直线边,保证结构的校准,然后通过三个直角连接片205与M3螺纹连接固定于下底板202上;下底板202圆弧边连接拼接片201,圆弧边上分布有五个拼接片凹陷2021,拼接片201通过拼接片凸起2011扣合圆弧边拼接片凹陷2021,起到位置锁定的作用,然后每一个拼接片201通过一个直角连接片205与M3螺纹连接固定于下底板202上;在下底板圆弧边与直线边之间的两个间隔板接口2024安装间隔板203,并分别通过两片M3螺纹连接固连;上底板202通过上述相同的方式与拼接片201、间隔板203与外壳板204对准,连接方式同样采用直角连接片205与M3螺纹连接。
模块机体2之间的连接通过上下底板202以及外壳板204上的连接片实现,首先纵向由上下底板202斜边的底板凹陷2023扣合于另一模块机体2模块斜边的底板凸起2022实现位置对准,然后通过四个直角连接片及M3螺纹连接实现固连;横向由外壳板204上一边的外壳凸起2041扣合于另一模块机体对应另一边的外壳凹陷2044实现位置对准,然后由钝角连接片及M3螺纹连接实现固连。
单模块无人机外壳由六个机体模块按照上述连接方式拼接成,机体模块内部涵道由30个拼接片201按照上述连接方式拼接成;单模块无人机机壳内的载荷舱段由间隔板203划分载荷舱段,通过间隙实现电气连接与信息交互。
如图5所示,单模块无人机的载荷负载模块3在物理上分为六个载荷舱段,分别是第一载荷舱段301、第二载荷舱段302、第三载荷舱段303、第四载荷舱段304、第五载荷舱段305、第六载荷舱段306,第一载荷舱段301、第二载荷舱段302、第三载荷舱段303、第四载荷舱段304、第五载荷舱段305、第六载荷舱段306均匀分布在环形无人机的舱段内,六个载荷舱段中间的无人机舱分布着对接装置。这些载荷包括但不局限于:雷达、光电设备、卫星通信、数据处理与能源等,这些功能载荷满足载荷舱段的外形,并满足模块化设计的整体功能完整性。
如图6所示,一种布置于狭小空间内进行层叠式起飞,但不局限于个数的本发明实施实例。空间内共布置7个单模块无人机,起飞顺序根据距离空间入口的距离远近界定,最先起飞的为主控模块401,主控模块在空中悬停,等待其他模块的起飞完成以及指挥中心的控制命令并在指定位置对接,然后起飞卫星通信模块402,起飞后接受主控模块发送的对接命令,完成对接;然后起飞能源模块405,接受主控模块的对接命令并在指定位置对接;最后依次起飞图像模块403以及雷达模块404,接受主控模块的对接命令,在指定位置完成对接。
在本发明的描述中,需要理解的是,术语“顺时针”、“逆时针”、“俯仰”、“偏航”、“垂直”、“水平”等指示的方位或位置关系为基于附图所示方位或位置关系,术语“电气连接”、“结构连接”、“固连”等位置关系代表接口或零件位置的关系。上述术语仅是为了描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以上对本发明的具体实例进行了描述,本实例中没有详细叙述的属本行业的公知常用手段,这里不进行逐一叙述。本发明不限于上述特定的实施方式,以上实例并不构成对本发明的保护范围的限制,凡是在本发明权利要求范围内的修改或变形均属于本发明的保护范围之内。
- 一种具备自主飞行能力的飞行阵列系统
- 一种具备飞行式集成制造能力的飞行制造方法与系统