一种高清图像信号的监控装置及其系统
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及监控设备技术领域,具体为一种高清图像信号的监控装置及其系统。
背景技术
云台摄像机是一种带有云台的摄像头,云台是安装和固定摄像头的支撑装置,现有的野外使用的云台摄像头在使用一段时间之后云台的传动机构会损坏,严重时会烧毁电机,这是由于摄像头和防护罩的重力过大,使得摄像头转动时的转轴与云台连接口之间的摩擦力过大,吊装摄像头的方式容易导致云台运转负荷大的缘故,另外由于云台的转动负荷大,就会导致云台摄像头转动时也会发生云台转不动的现象,使得摄像头的实际作业范围大大减小,即便云台能够转动,也不能匀速缓慢转动而是“一顿一顿”的转动,使得摄像头转动的同时“摇摇晃晃”,从而严重影响着监控装置的成像质量,因此,我们提出一种防止卡顿和摇晃的高清图像信号的监控装置及其系统。
发明内容
为实现上述防止卡顿和摇晃目的,本发明提供如下技术方案:一种高清图像信号的监控装置,包括云台安装架、电动伸缩杆、连接轴、摄像头本体、支撑柱、滚动减小摩擦组件和驱动组件,所述电动伸缩杆与云台安装架底端内壁固定连接,所述电动伸缩杆底端与连接轴转动连接,所述连接轴底端与摄像头本体固定连接,所述云台安装架底端位于连接轴左右两侧与支撑柱固定连接,通过固定云台安装架将该监控装置固定住,电动伸缩杆底端通过轴承与连接轴转动连接。
作为优化,所述滚动减小摩擦组件由动力齿轮、传动齿轮、固定环柱、滚珠、连接圆环、连接杆、弧形滑块、连接块、活动杆、定杆、伸缩杆、矩形滑块、空心杆、弧形推头、钢珠和齿轮马达组成,所述动力齿轮与位于连接轴右侧的支撑柱内壁转动连接,所述动力齿轮左侧与传动齿轮啮合,所述动力齿轮顶端与齿轮马达固定连接,所述齿轮马达与支撑柱内壁固定连接与位于连接轴右侧的支撑柱内壁内壁转动连接,通过滚动减小摩擦组件将连接轴转动时所受到的滑动摩擦力转化为滚动摩擦力,使其摩擦力大大减小。
作为优化,传动齿轮内壁与固定环柱转动连接,所述传动齿轮内壁与连接杆固定连接,所述连接杆穿过固定环柱和弧形滑块与连接块内壁滑动连接,所述弧形滑块外壁与固定环柱内壁滑动连接,所述弧形滑块内壁远离传动齿轮的一侧与连接块固定连接,所述连接块远离弧形滑块的一端与空心杆固定连接,所述连接杆远离传动齿轮的一端正面与活动杆转动连接,所述活动杆内壁与定杆滑动连接,所述定杆背面与连接块内壁正面转动连接,所述活动杆远离连接杆的一端与伸缩杆固定连接,所述伸缩杆远离活动杆的一端与矩形滑块正面转动连接,所述矩形滑块外壁与空心杆内壁滑动连接,所述弧形推头与空心杆左右两侧固定连接,所述弧形推头内壁远离空心杆的一侧与钢珠活动连接,所述滚珠位于空心杆左右两侧与固定环柱内壁活动连接,所述连接圆环内壁与连接轴外壁固定连接。
作为优化,所述驱动组件由内腔圆环、第一圆形滑块、珠架、第一转珠、第二转珠、连接架、弹簧推杆、第二圆形滑块、重力传感器和安装板组成,所述连接轴左右两侧与连接架固定连接,所述连接架远离连接轴的一侧与第二转珠转动连接,所述连接架底端与弹簧推杆固定连接,所述弹簧推杆底端与第二圆形滑块固定连接,所述第二圆形滑块外壁与内腔圆环内壁底端转动连接,所述第一转珠位于第二转珠上方与珠架外壁转动连接,所述珠架顶端与第一圆形滑块底端固定连接,所述第一圆形滑块外壁与内腔圆环内壁转动连接,所述重力传感器与第二圆形滑块内壁顶端固定连接,所述安装板顶端与支撑柱底端固定连接,驱动组件通过连接轴带着摄像头本体转动的同时也减小其摩擦力,使其转动的更加稳定。
作为优化,所述内腔圆环外壁与安装板内壁固定连接,所述内腔圆环内壁与连接轴外壁转动连接。
作为优化,一种高清图像信号的监控装置的控制系统,所述齿轮马达输入端信号连接有PLC控制器,PLC控制器输出端信号连接有第一滑块马达,PLC控制器输出端信号连接有第二滑块马达,PLC控制器输出端信号与电动伸缩杆信号连接,PLC控制器输入端与重力传感器信号连接,PLC控制器安装在云台内,云台输入端与无线模块信号连接,无线模块输入端信号连接有手机APP,手机APP输出端与无线模块信号连接,手机APP通过无线模块控制PLC控制器,PLC控制器控制电动伸缩杆运动,重力传感器接受压力发送信号到PLC控制器,PLC控制器同时控制第一滑块马达、第二滑块马达和齿轮马达运行。
作为优化,所述固定环柱左右两侧均安装有短杆,短杆远离固定环柱的一端与支撑柱固定连接,从而将固定环柱的位置固定住。
作为优化,所述钢珠数量为八个,每个所述弧形推头内壁与四个钢珠活动连接。
作为优化,所述矩形滑块内壁固定安装有第一磁铁,所述滚珠内壁固定安装有第二磁铁,第一磁铁与第二磁铁相互吸引,使得矩形滑块靠近滚珠时能对其产生吸引力。
作为优化,所述第一转珠内置有第三磁铁,所述第二转珠内置有第四磁铁,第三磁铁与第四磁铁相互吸引,使得第一转珠与第二转珠相互吸引。
作为优化,所述滚珠、连接杆、弧形滑块、连接块、活动杆、定杆、伸缩杆、矩形滑块、空心杆、两个弧形推头和八个钢珠为一组,且数量为十二个,并关于连接轴的中心点进行环形阵列,使得连接圆环与固定环柱之间的摩擦力大大减小。
作为优化,所述固定环柱远离传动齿轮的一侧内壁开设有第一弧形环槽,所述连接圆环远离连接轴的一侧内壁开设有第二弧形环槽,第一弧形环槽和第二弧形环槽内壁均与滚珠滑动连接,使得滚珠能在固定环柱与连接圆环之间转动。
作为优化,所述第一圆形滑块、珠架、第一转珠、第二转珠、连接架、弹簧推杆和第二圆形滑块为一组,且数量为两个,并关于连接轴垂直中心线进行对称设置,所述第一转珠与第二转珠相互吸引。
作为优化,所述第一圆形滑块内壁与第一滑块马达固定连接,第一滑块马达输出轴固定安装有第一驱动齿轮,驱动齿轮顶端啮合有第一环形齿轮,第一环形齿轮顶端与内腔圆环内壁顶端固定连接,所述第二圆形滑块内壁与第二滑块马达固定连接,第二滑块马达输出轴固定安装有第二驱动齿轮,第二驱动齿轮底端啮合有第二环形齿轮,第二环形齿轮与内腔圆环内壁底端固定连接。
本发明的有益效果是:该高清图像信号的监控装置及其系统,连接架带着连接轴转动,第一转珠与第二转珠始终保持吸引力,同时弹簧推杆对连接架施加一定推力,从而承担着连接轴的部分重力,当连接轴带着连接圆环逆时针转动时,通过滚珠在连接圆环与固定环柱之间滑动,减小连接圆环受到的摩擦力,从而减小连接轴所受到的转动阻力,与此同时,十二个滚珠左侧均靠近矩形滑块且被其吸引,右侧均受到弧形推头的推力,使得十二个滚珠也相对于连接圆环的中心点进行逆时针转动,从而将连接圆环转动时的阻力减小到忽略不计,使得连接轴转动的更加平稳,不会产生任何阻力,不会出现连接轴转动时卡顿的现象,使得摄像头不会晃动从而成像清晰,且使用寿命大幅度提升。
附图说明
图1为本发明正视结构示意图;
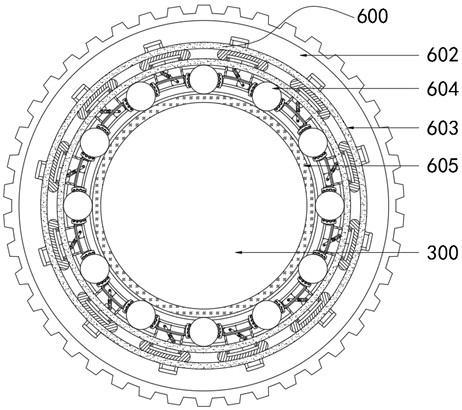
图2为本发明滚动减小摩擦组件俯视结构示意图;
图3为本发明滚动减小摩擦组件俯视剖视结构示意图;
图4为本发明图3中局部截取结构示意图;
图5为本发明图4中A处结构放大示意图;
图6为本发明驱动组件结构示意图;
图7为本发明图6中B结构放大示意图;
图8为本发明图6中C结构放大示意图;
图9为本发明的系统图。
图中:100、云台安装架;200、电动伸缩杆;300、连接轴;400、摄像头本体;500、支撑柱;600、滚动减小摩擦组件;601、动力齿轮;602、传动齿轮;603、固定环柱;604、滚珠;605、连接圆环;606、连接杆;607、弧形滑块;608、连接块;609、活动杆;610、定杆;611、伸缩杆;612、矩形滑块;613、空心杆;614、弧形推头;615、钢珠;616、齿轮马达;700、驱动组件;701、内腔圆环;702、第一圆形滑块;703、珠架;704、第一转珠;705、第二转珠;706、连接架;707、弹簧推杆;708、第二圆形滑块;709、重力传感器;710、安装板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,一种高清图像信号的监控装置,包括云台安装架100、电动伸缩杆200、连接轴300、摄像头本体400、支撑柱500、滚动减小摩擦组件600和驱动组件700,其特征在于:电动伸缩杆200与云台安装架100底端内壁固定连接,电动伸缩杆200底端与连接轴300转动连接,连接轴300底端与摄像头本体400固定连接,云台安装架100底端位于连接轴300左右两侧与支撑柱500固定连接,连接轴300与云台安装架100的垂直中心线重合;
请参阅图1-5,滚动减小摩擦组件600由动力齿轮601、传动齿轮602、固定环柱603、滚珠604、连接圆环605、连接杆606、弧形滑块607、连接块608、活动杆609、定杆610、伸缩杆611、矩形滑块612、空心杆613、弧形推头614、钢珠615和齿轮马达616组成,动力齿轮601与位于连接轴300右侧的支撑柱500内壁转动连接,动力齿轮601左侧与传动齿轮602啮合,动力齿轮601顶端与齿轮马达616固定连接,齿轮马达616与支撑柱500内壁固定连接与位于连接轴300右侧的支撑柱500内壁内壁转动连接;
请参阅图4-6,传动齿轮602内壁与固定环柱603转动连接,传动齿轮602内壁与连接杆606固定连接,连接杆606穿过固定环柱603和弧形滑块607与连接块608内壁滑动连接,弧形滑块607外壁与固定环柱603内壁滑动连接,弧形滑块607内壁远离传动齿轮602的一侧与连接块608固定连接,连接块608远离弧形滑块607的一端与空心杆613固定连接,连接杆606远离传动齿轮602的一端正面与活动杆609转动连接,活动杆609内壁与定杆610滑动连接,定杆610背面与连接块608内壁正面转动连接,活动杆609远离连接杆606的一端与伸缩杆611固定连接,伸缩杆611远离活动杆609的一端与矩形滑块612正面转动连接,矩形滑块612外壁与空心杆613内壁滑动连接,弧形推头614与空心杆613左右两侧固定连接,弧形推头614内壁远离空心杆613的一侧与钢珠615活动连接,钢珠615数量为八个,每个弧形推头614内壁与四个钢珠615活动连接,滚珠604位于空心杆613左右两侧与固定环柱603内壁活动连接,连接圆环605内壁与连接轴300外壁固定连接;
请参阅图3,滚珠604、连接杆606、弧形滑块607、连接块608、活动杆609、定杆610、伸缩杆611、矩形滑块612、空心杆613、弧形推头614和钢珠615为一组,且数量为十二个,并关于连接轴300的中心点进行环形阵列;
根据图3-5,众所周知,摄像头本体400需要运行时会顺时针和逆时针转动交替进行,通过连接轴300带着摄像头本体400转动,连接轴300承担着摄像头本体400全部的重量,当连接轴300顺时针转动时,根据图1,齿轮马达616带着动力齿轮601逆时针转动,使得传动齿轮602顺时针转动,传动齿轮602通过连接杆606带着连接块608顺时针转动,连接块608带着弧形滑块607运动,连接杆606通过定杆610和活动杆609带着伸缩杆611转动,伸缩杆611带着矩形滑块612运动,当连接杆606运动到弧形滑块607最左侧时,矩形滑块612运动到空心杆613最右侧;
请参阅图4-5,矩形滑块612内置有第一磁铁,滚珠604内置有第二磁铁,第一磁铁与第二磁铁相互吸引;
根据图3-5,矩形滑块612与空心杆613右侧的滚珠604相互吸引,安装在空心杆613左侧的弧形推头614通过钢珠615推着位于空心杆613左侧的滚珠604运动;
请参阅图3-5,固定环柱603远离传动齿轮602的一侧内壁开设有第一弧形环槽,连接圆环605远离连接轴300的一侧内壁开设有第二弧形环槽,第一弧形环槽和第二弧形环槽内壁均与滚珠604滑动连接;
根据图3-5,当连接轴300的大部分重量由滚动减小摩擦组件600承担,且通过十二个滚珠604将其转动的摩擦力大大减小。
请参阅图1-8,驱动组件700由内腔圆环701、第一圆形滑块702、珠架703、第一转珠704、第二转珠705、连接架706、弹簧推杆707、第二圆形滑块708、重力传感器709和安装板710组成,连接轴300左右两侧与连接架706固定连接,连接架706远离连接轴300的一侧与第二转珠705转动连接,连接架706底端与弹簧推杆707固定连接,弹簧推杆707底端与第二圆形滑块708固定连接,第二圆形滑块708外壁与内腔圆环701内壁底端转动连接,第一转珠704位于第二转珠705上方与珠架703外壁转动连接,珠架703顶端与第一圆形滑块702底端固定连接,第一圆形滑块702外壁与内腔圆环701内壁转动连接,重力传感器709与第二圆形滑块708内壁顶端固定连接,安装板710顶端与支撑柱500底端固定连接;
请参阅图3,内腔圆环701外壁与安装板710内壁固定连接,内腔圆环701内壁与连接轴300外壁转动连接;
请参阅图6,第一圆形滑块702、珠架703、第一转珠704、第二转珠705、连接架706、弹簧推杆707和第二圆形滑块708为一组,且数量为两个,并关于连接轴300垂直中心线进行对称设置。
请参阅图6-8,第一圆形滑块702内壁与第一滑块马达固定连接,第一滑块马达输出轴固定安装有第一驱动齿轮,驱动齿轮顶端啮合有第一环形齿轮,第一环形齿轮顶端与内腔圆环701内壁顶端固定连接,第二圆形滑块708内壁与第二滑块马达固定连接,第二滑块马达输出轴固定安装有第二驱动齿轮,第二驱动齿轮底端啮合有第二环形齿轮,第二环形齿轮与内腔圆环701内壁底端固定连接;
根据图6-8,一般情况下,第一转珠704与第二转珠705相互吸引贴合在一起,当电动伸缩杆200不再承担连接轴300的重力时,连接轴300通过连接架706带着第二转珠705向下运动,同时第一滑块马达和第二滑块马达均运行,使得第一圆形滑块702和第二圆形滑块708同时转动,第二圆形滑块708通过连接架706带着连接轴300转动;
请参阅图6-9,第一转珠704内置有第三磁铁,第二转珠705内置有第四磁铁,第三磁铁与第四磁铁相互吸引。
根据图6-9,同时第一转珠704与第二转珠705相互吸引也分担部分连接轴300的重力,从而让连接轴300的转动更加省力。
请参阅图9,一种高清图像信号的监控装置的控制系统,齿轮马达616输入端信号连接有PLC控制器,PLC控制器输出端信号连接有第一滑块马达,PLC控制器输出端信号连接有第二滑块马达,PLC控制器输出端信号与电动伸缩杆200信号连接,PLC控制器输入端与重力传感器709信号连接,PLC控制器安装在云台内,云台输入端与无线模块信号连接,无线模块输入端信号连接有手机APP,手机APP输出端与无线模块信号连接,手机APP通过无线模块控制PLC控制器,PLC控制器控制电动伸缩杆200运动,电动伸缩杆200带着连接轴300运动,使得重力传感器709接受压力发送信号到PLC控制器,PLC控制器同时控制第一滑块马达、第二滑块马达和齿轮马达616运行。
在使用时,请参阅图1-9,初始状态时,第一转珠704与第二转珠705相互接触,第一转珠704受第二转珠705吸引影响停留在原地,当摄像头本体400需要逆时针转动时,电动伸缩杆200带着连接轴300向下运动,连接轴300向下运动带着连接架706运动,使得第二转珠705向下运动,并与第一转珠704分离,第一转珠704在第一圆形滑块702的作用下在内腔圆环701内壁逆时针转动,与此同时第二圆形滑块708运行通过弹簧推杆707带着连接架706逆时针转动,连接架706带着连接轴300转动,连接架706带着第二转珠705逆时针转动,第一转珠704与第二转珠705垂直中心线始终保持重合,使得第一转珠704与第二转珠705始终保持吸引力,同时弹簧推杆707对连接架706施加一定推力,从而承担着连接轴300的部分重力,当连接轴300带着连接圆环605逆时针转动时,通过滚珠604在连接圆环605与固定环柱603之间滑动,减小连接圆环605受到的摩擦力,从而减小连接轴300所受到的转动阻力,与此同时连接轴300逆时针转动的同时齿轮马达616通过动力齿轮601带着传动齿轮602逆时针转动,传动齿轮602带着连接杆606逆时针转动,连接杆606运动到连接块608内壁左侧,这段过程中,连接杆606带着活动杆609绕着定杆610转动,使得活动杆609通过伸缩杆611带着矩形滑块612运动到空心杆613内壁右侧,矩形滑块612与位于空心杆613右侧的滚珠604吸引,使得位于空心杆613右侧的滚珠604具有一定的逆时针转动的运动趋势,位于空心杆613左侧的弧形推头614通过钢珠615对位于空心杆613左侧的滚珠604施加一定作用力,使其具有一定的逆时针转动的运动趋势,使得十二个滚珠604左侧均靠近矩形滑块612且被其吸引,右侧均受到弧形推头614的推力,使得十二个滚珠604也相对于连接圆环605的中心点进行逆时针转动,从而将连接圆环605转动时的阻力减小到忽略不计,当摄像头本体400需要顺时针转动时,上述步骤反之运行,使得连接轴300转动的更加平稳,不会产生任何阻力。
综上所述,该高清图像信号的监控装置及其系统,连接架706带着连接轴300转动,第一转珠704与第二转珠705始终保持吸引力,同时弹簧推杆707对连接架706施加一定推力,从而承担着连接轴300的部分重力,当连接轴300带着连接圆环605逆时针转动时,通过滚珠604在连接圆环605与固定环柱603之间滑动,减小连接圆环605受到的摩擦力,从而减小连接轴300所受到的转动阻力,与此同时,十二个滚珠604左侧均靠近矩形滑块612且被其吸引,右侧均受到弧形推头614的推力,使得十二个滚珠604也相对于连接圆环605的中心点进行逆时针转动,从而将连接圆环605转动时的阻力减小到忽略不计,使得连接轴300转动的更加平稳,不会产生任何阻力,不会出现连接轴300转动时卡顿的现象,使得摄像头不会晃动从而成像清晰,且使用寿命大幅度提升。
以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种高清图像信号的监控装置及其系统
- 隔行或逐行扫描图像序列的数字视频信号时-空次取样装置,包括该装置的高清晰度电视图像的传送系统及该系统的发射级和接收级