一种用于树障清理飞行机器人的刀具脱钩装置
文献发布时间:2023-06-19 10:18:07
技术领域
本发明涉及一种树障清理飞行机器人的刀具接口装置,属于输电线路树障清理装置技术领域。
背景技术
树障是输电线路通道存在的一种安全隐患,表现为通道内树木的不断增生逐渐威胁到输电线路的运行安全。为此,各级电力部门每年都要投入大量的人力、物力与财力对辖区内的通道树障进行清理整治。目前的树障清理主要依赖于人工作业,存在着效率不高、安全风险大的不足,因此亟需一种可对电力线路通道树障进行高效快速清理、不易受地形环境约束的飞行机器人。其中,基于旋翼类无人机平台、通过悬挂机构挂载刀具阵列的树障清理飞行机器人方案,具有良好的稳定性与操控性。
树障清理飞行机器人所挂载的刀具系统,在作业过程中存在着被树枝卡住而难以挣脱的情况,极易引发树障清理飞行机器人坠毁等安全事故,因此需要研制一种具有安全保护功能的脱钩装置。在正常挂载时,该脱钩装置应能承载刀具系统的重量和树障的牵扯力,并通过接口向刀具系统传递电气能源与控制信号,同时还具有消除机械间隙及提供减振的效能;当发生异常需要脱钩时,该脱钩装置应能根据控制指令对刀具系统实施脱钩控制,从而最大限度地保护飞行机器人的安全,避免引发坠机等事故。
发明内容
本发明解决的技术问题是:提供一种用于树障清理飞行机器人的刀具脱钩装置,以解决现有技术中存在的作业时刀具系统一旦被树枝卡住,而树障清理飞行机器人难以挣脱的安全隐患问题。
本发明采取的技术方案为:一种树障清理飞行机器刀具脱钩装置,其上端与飞行机器人下端的悬挂机构连接,在其下端固定连接有刀具系统,其包括固定连接于悬挂机构下端的上脱钩组件和固定连接于刀具系统上侧可与上脱钩组件相互挂接的下脱钩组件;所述上脱钩组件包括固定连接于悬挂机构的上基座、固定连接于上基座且输出杆向下的直线舵机、固定连接于上基座的上挂钩轴、以上挂钩轴为转轴且呈“L”形的上挂钩、安装于上基座和上挂钩的横向杆的末端之间且能为上挂钩提供逆时针恢复力矩的拉簧、以及固定连接于上基座的上电气接口;所述下脱钩组件包括固定连接于刀具系统的下基座、固定连接于下基座且可与上挂钩形成上下挂接的下挂扣、固定连接于下基座的下电气接口;上电气接口与下电气接口形成对插连接,用于传递电能与控制信号。
优选的,所述的上挂钩的下端为向右的弯钩,弯钩的右下侧呈斜角外形,下挂扣的左上侧具有与上挂钩的弯钩斜角外轮廓呈挤压推让配合的斜角外形。
优选的,所述的下挂扣设有配合上挂钩的弯钩的方孔,一旦上挂钩的弯钩旋入方孔即可使下挂扣与上挂钩形成可靠挂接。
优选的,所述的下脱钩组件还包括嵌于下基座与上基座之间,并与二者形成紧密接触的弹性垫圈。
优选的,所述的直线舵机与飞行平台中的控制器连接,直线舵机收到该控制器的指令后将驱动其输出杆伸长或收缩,从而使上挂钩顺时针或逆时针随动旋转。
优选的,直线舵机的输出杆的末端设有轴承。
优选的,所述的飞行机器人包括自上而下布置的飞行平台、悬挂机构和刀具系统,悬挂机构固定连接于飞行平台的下端,刀具系统通过脱钩装置与悬挂机构连接;所述的飞行平台为单旋翼的直升机或左右对称布局的多旋翼飞行器,多旋翼飞行器不局限于任意已知的四、六、八等多旋翼构型;所述的悬挂机构包括左右对称布置的L(L≥2)根垂直杆,相邻垂直杆之间设有横向加强梁。
本发明一种用于树障清理飞行机器人的刀具脱钩装置的工作方法如下:
1)当脱钩装置收到飞行平台中的控制器的“脱钩”指令时,直线舵机的输出杆伸长,带动轴承向下移动,轴承与上挂钩的横向杆的上平面挤压接触,推动上挂钩顺时针旋转,使上挂钩下端的弯钩与下挂扣脱离,从而实现刀具系统的机械脱钩,同时也完成电气接口的分离;之后,直线舵机的输出杆收缩,上挂钩在拉簧的拉力作用下逆时针旋转复位。
2)当刀具系统挂接时,下挂扣向上运动对上挂钩的弯钩形成向左的挤压,推动上挂钩顺时针旋转退让,下挂扣向上运动到位时,上挂钩的弯钩快速旋入下挂扣的方孔,由此形成稳定可靠的挂接,同时也完成电气接口的连接;此方式亦可在不通电的情况下实现刀具系统的挂接。
本发明的有益效果:与现有技术相比,本发明的效果如下:
1)本脱钩装置安装于飞行机器人的悬挂机构与刀具系统之间,在作业时如遇到刀具系统被树枝卡住且无法脱离时,可通过控制指令使刀具于树障清理飞行机器人脱离,提高了树障清理飞行机器人的作业安全性;
2)刀具系统与飞行机器人控制器之间的电气接口为隐藏式,降低了外界环境对电气接口的干扰,提高了电气与控制的安全性,增加了外形的美观性和系统的可靠性;
3)脱钩时,直线舵机的输出杆伸长,轴承推动上挂钩的横向杆向下运动,使上挂钩顺时针旋转,上挂钩的弯钩快速退出下挂扣的方孔,刀具系统自动与飞行机器人分离,之后直线舵机输出杆收缩,上挂钩在拉簧的拉力作用下逆时针旋转复位;挂接时,下挂扣向上运动对上挂钩的弯钩形成向左的挤压,推动上挂钩顺时针旋转,到达极限位置时,上挂钩的弯钩快速旋入下挂扣的方孔,由此形成稳定可靠的挂接。此方式可在不通电的情况下,实现刀具系统的挂接;
4)在下基座与上基座之间设置的弹性垫圈,与下基座与上基座形成紧密接触,起到良好的密封与减振作用;
5)本脱钩装置结构简单,易于实现,使刀具系统的挂接和脱钩更加方便快捷;一旦刀具系统受损,可快速地进行换新,确保较高的作业效率;
6)本脱钩装置使悬挂机构和刀具系统分成独立模块,方便树障清理飞行机器人的收纳和运输。
附图说明
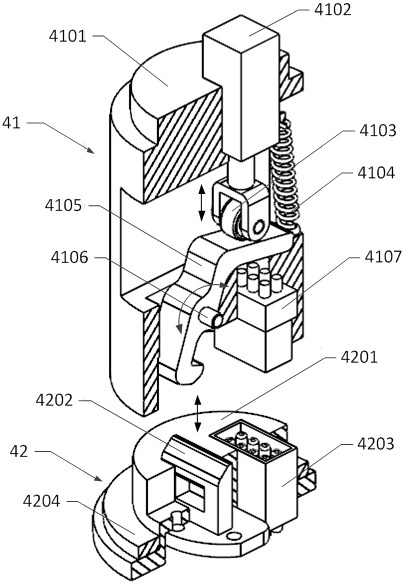
图1为本脱钩装置分离状态结构示意图;
图2为本脱钩装置机载分离状态示意图;
图3为本脱钩装置机载挂合状态示意图;
图4为为本脱钩装置机载分离状态外观示意图;
图5为本脱钩装置下挂扣示意图;
图6为应用本脱钩装置的树障清理飞行机器人整体结构示意图。
图中,1—飞行平台,2—悬挂机构,3—刀具系统,4—脱钩装置;
41—上脱钩组件,4101—上基座,4102—直线舵机,4103—轴承,4104—拉簧,4105—上挂钩,4106—上挂钩轴,4107—上电气接口;
42—下脱钩组件,4201—下基座,4202—下挂扣,4203—下电气接口,4204—弹性垫圈。
具体实施方式
下面,结合附图及具体的实施例对本发明进行进一步介绍。
实施例1:如图1~图6所示,一种用于树障清理飞行机器人的刀具脱钩装置,其上端与飞行机器人下端的悬挂机构2连接,在其下端固定连接有刀具系统3,其包括固定连接于悬挂机构2下端的上脱钩组件41和固定连接于刀具系统3上侧可与上脱钩组件41相互挂接的下脱钩组件42;所述上脱钩组件41包括固定连接于悬挂机构2的上基座4101、固定连接于上基座4101且输出杆向下的直线舵机4102、固定连接于上基座4101的上挂钩轴4106、以上挂钩轴4106为转轴且呈“L”形的上挂钩4105、安装于上基座4101和上挂钩4105的横向杆的末端与之间且能为上挂钩4105提供逆时针恢复力矩的拉簧4104、以及固定连接于上基座4101用于传递电能与控制信号的上电气接口4107;所述下脱钩组件42包括固定连接于刀具系统3的下基座4201、固定连接于下基座4201且可与上挂钩4105形成上下挂接的下挂扣4202、固定连接于下基座4201的下电气接口4203;上电气接口4107与下电气接口4203形成对插连接,用于传递电能与控制信号。
优选的,所述的上挂钩4105的下端为向右的弯钩,弯钩的右下侧呈斜角外形,下挂扣4202的左上侧具有与上挂钩4105的弯钩斜角外轮廓呈挤压推让配合的斜角外形。
优选的,所述的下挂扣4202设有配合上挂钩4105的弯钩的方孔,一旦上挂钩4105的弯钩旋入方孔即可使下挂扣4202与上挂钩4105形成可靠挂接。
优选的,所述的下脱钩组件42还包括嵌于下基座4201、与上基座4101之间,并与二者形成紧密接触的弹性垫圈4204。
优选的,所述的直线舵机4102与飞行平台1中的控制器连接,直线舵机4102收到该控制器的指令后将驱动其输出杆伸长或收缩,从而使上挂钩4105顺时针或逆时针随动旋转。
优选的,直线舵机4102的输出杆的末端设有轴承4103。
优选的,如图5所示,所述的飞行机器人包括自上而下布置的飞行平台1、悬挂机构2和刀具系统3,悬挂机构2固定连接于飞行平台1的下端,刀具系统3通过脱钩装置4与悬挂机构2连接;所述的飞行平台1为单旋翼的直升机或左右对称布局的多旋翼飞行器,多旋翼飞行器不局限于任意已知的四、六、八等多旋翼构型;所述的悬挂机构2包括左右对称布置的L(L≥2)根垂直杆,相邻垂直杆之间设有横向加强梁。
本发明一种用于树障清理飞行机器人的刀具脱钩装置的工作方法如下:
1)当脱钩装置4收到飞行平台1中的控制器的“脱钩”指令时,直线舵机4102的输出杆伸长,带动轴承4103向下移动,轴承4103与上挂钩4105横向杆的上平面挤压接触,推动上挂钩4105顺时针旋转,使上挂钩4105下端的弯钩与下挂扣4202脱离,从而实现刀具系统3的机械脱钩,同时也完成电气接口的分离;之后,直线舵机4102输出杆收缩,上挂钩4105在拉簧4104的拉力作用下逆时针旋转复位。
2)当刀具系统3挂接时,下挂扣4202向上运动对上挂钩4105的弯钩形成向左的挤压,推动上挂钩4105顺时针旋转,下挂扣4202向上运动到位时,,上挂钩4105的弯钩快速旋入下挂扣4202的方孔,由此形成稳定可靠的挂接,同时也完成电气接口的连接。此方式可在不通电的情况下实现刀具系统3的挂接。
以上所述,仅为本发明的具体实施方式实例,本发明的保护范围并不局限于此。熟悉该技术领域的技术人员在本发明披露的技术范围内,可轻易找到变化或替换方式,这些都应涵盖在本发明的保护范围之内。为此,本发明的保护范围应以所述权利要求的保护范围为准。
- 一种用于树障清理飞行机器人的刀具脱钩装置
- 一种用于树障清理飞行机器人的圆盘锯刀具系统