一种扑翼飞行机器人的传动机构
文献发布时间:2023-06-19 10:18:07
技术领域
本发明涉及一种扑翼飞行机器人的传动机构,属于机器人传动技术领域。
背景技术
扑翼飞行机器人,是指基于仿生学原理设计制造的,机翼能像鸟类和昆虫翅膀那样上下扑动的重于空气的飞行器。扑翼飞行机器人通过扑动机翼产生升力和推力,从而实现起飞、降落、加速、减速、急跃升、急转弯、悬停、倒飞、俯冲和举升等飞行动作。与固定翼和旋翼飞行器相比,扑翼飞行机器人具有更强的低耗性、灵活性和机动性,是本领域研究热点。
当前可飞的扑翼飞行机器人主要采用电机作为动力源,电机输出的高速旋转运动首先通过减速齿轮组进行减速,之后通过传动机构驱动扑翼机构实现拍动运动。为减少传动部件的重量,简化飞行器的装配过程,多数扑翼飞行机器人采用曲柄摇杆机构来驱动每个扑翼,曲柄多与减速齿轮组最外层齿轮连接。此类传动机构实现了在减速组最外层齿轮中低速转动,再经曲柄摇杆机构传动,驱动扑翼实现往复拍动。
而为了获取较大的减速比和大力矩,多数扑翼飞行机器人采用三级或更高的齿轮减速级数,空间不够简单紧凑,总体尺寸较大;并且部分齿轮裸露在机身外层,在实验和实际使用过程中容易受损。
现有扑翼机对于整体传动机构的简化、机身尺寸的减小和关键传动部分的保护等方面仍然有很大的改进空间。
发明内容
本发明的目的在于提供一种扑翼飞行机器人的传动机构,以解决现有技术空间不够简单紧凑,总体尺寸较大;并且部分齿轮裸露在机身外层的缺陷。
一种扑翼飞行机器人的传动机构,包括对称曲柄摇杆机构、双层机架和扑翼机构,所述双层机架之间设有减速齿轮组,所述减速齿轮组驱动曲柄摇杆机构带动扑翼机构转动;
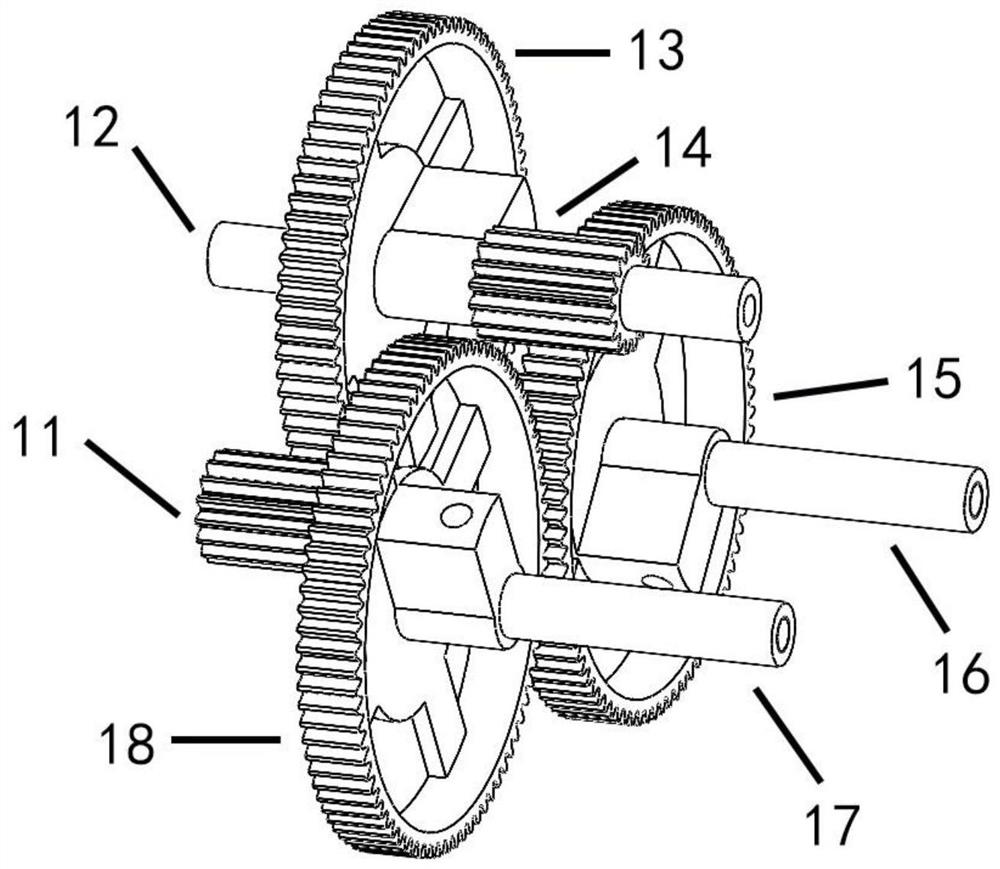
所述减速齿轮组包括主轴齿轮、套设在齿轮轴a上的大齿轮a和小齿轮、与小齿轮啮合的大齿轮b以及与大齿轮b啮合的大齿轮c;
所述主轴齿轮转动带动大齿轮a和小齿轮转动,所述小齿轮带动大齿轮b使大齿轮c转动。
进一步地,所述主轴齿轮和大齿轮a的轴心连线与所述大齿轮a端面竖直轴线的夹角为50°—60°。
进一步地,所述小齿轮的轴心和大齿轮b的轴心连线与小齿轮端面竖直轴线的夹角为30°—40°。
进一步地,所述双层机架包括第一层机架和第二层机架;
所述齿轮轴a活动连接在第二层机架上,所述大齿轮c和大齿轮b分别通过齿轮轴c和齿轮轴b活动连接在第一层机架上。
进一步地,所述对称曲柄摇杆机构包括单曲柄单摇杆机构一和单曲柄单摇杆机构二;所述单曲柄单摇杆机构一其一端与齿轮轴c连接,另一端与其一扑翼机构连接;
所述单曲柄单摇杆机构二其一端与齿轮轴b连接,另一端与另一扑翼机构连接。
进一步地,所述单曲柄单摇杆机构一和单曲柄单摇杆机构二分别由曲柄a、摇杆a组成的单曲柄单摇杆机构一和曲柄b和摇杆b组成的单曲柄单摇杆机构二组成。
与现有技术相比,本发明所达到的有益效果:本发明通过设置双层机架与减速齿轮组的相对位置关系,使减速齿轮组位于所述双层机架的中间,保护了减速齿轮组,减少传动机构受到外部冲击受损的可能性。
本发明通过简化减速齿轮组的减速级数至二级,且调整齿轮的齿数和模数,简化了传动机构、减小了整体尺寸。
附图说明
图1为本发明传动机构的整体结构示意图;
图2为本发明传动机构的传动机构减速齿轮组示意图;
图3为本发明传动机构减速齿轮组正视图;
图4为本发明传动机构的对称曲柄摇杆机构示意图;
图5为本发明双层机架结构示意图;
图6为本发明第一层机架示意图;
图7为本发明第二层机架示意图;
图8为本发明局部放大示意图。
图中:1-减速齿轮组;2-对称曲柄摇杆机构;3-双层机架;31-第一层机架; 32-第二层机架;311-齿轮轴c安装孔;312-齿轮轴a安装孔一;313-齿轮轴b安装孔;321-电机安装孔;322-齿轮轴a安装孔二;4-扑翼机构;11-主轴齿轮;12-齿轮轴a;13-大齿轮a;14-小齿轮;15-大齿轮b;16-齿轮轴b;17-齿轮轴c;18-大齿轮c;21-曲柄a;22-曲柄b;23-摇杆a;24-摇杆b;25-铰接点A;26-铰接点B;27-铰接点C;28-铰接点D。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1所示,本发明一种扑翼机器人的传动机构,包括减速齿轮组1,对称曲柄摇杆机构2、双层机架3、扑翼机构4。所述减速齿轮组1与双层机架连接并固定在双层机架3中间,所述对称曲柄摇杆机构2与所述减速齿轮组1连接。
如图2、3所示,所述减速齿轮组1由主轴齿轮11,齿轮轴a12,大齿轮a13,小齿轮14,大齿轮b15,齿轮轴b16,齿轮轴c17,大齿轮c18所组成。主轴齿轮11,大齿轮a13,小齿轮14,大齿轮b15,大齿轮c18制作材料可以选用尼龙或者铝合金材料,齿轮轴a12,齿轮轴b16,齿轮轴c17可以选用航模用铝柱。
如图4所示,所述对称曲柄摇杆机构由曲柄a21,曲柄b22,摇杆a23,摇杆b24组成 ,曲柄a21和曲柄b22制作材料可以选用塑料或者铝合金。摇杆a23,摇杆b24选用杆端关节轴承,杆端关节轴承分为内螺纹部分和外螺纹部分,通过调节杆端关节轴承型号和螺纹啮合部分长度,可以自由调节摇杆长度。
如图5所示,所述双层机架3由第一层机架31和第二层机架32组成。对于第一层机架31和第二层机架32的材质和加工方式,本发明对此并不作具体限定,例如,可以选用光敏树脂通过3D打印加工制成或者碳纤维板进行CNC加工制成。所述第一层机架31预留齿轮轴c安装孔311、齿轮轴a安装孔312、齿轮轴b安装孔313;所述第二层机架上电机安装孔321,齿轮轴a安装孔322。
如图2所示,主轴齿轮11固定在直流无刷电机输出轴上,而直流无刷电机固定在第二层机身对应的电机安装孔321中,小齿轮14和大齿轮a13固定在齿轮轴a12上,而齿轮轴a12通过轴承和轴承座固定在双层机身上。主轴齿轮11与大齿轮a13在同一平面内啮合,且该平面靠近并平行于第二层机身32。大齿轮a13与小齿轮14固定在齿轮轴b16上,小齿轮14与大齿轮b16在同一平面内啮合,该平面靠近并平行于第一层机身31,而齿轮轴b16通过轴承和轴承座固定在双层机身上。大齿轮c18固定在齿轮轴c17固定在齿轮轴c17上,并且与大齿轮b16啮合,啮合位置在第一层机架上;大齿轮b16和大齿轮c18型号规格完全相同,并且它们的相对位置关于第一层机身31的竖直轴线对称。在整个减速齿轮组1中,主轴齿轮11与大齿轮a13共同构成齿轮组第一级减速,小齿轮14与大齿轮b16共同构成齿轮组第二级减速。
如图2、图3所示,所述主轴齿轮11和大齿轮a13的轴心连线与大齿轮a13端面竖直轴线的夹角为50°—60°。所述小齿轮14的轴心和大齿轮b15的轴心连线与小齿轮14端面竖直轴线的夹角为30°—40°。其中,对于两类夹角的角度不作过于具体的限定,例如,55°、35°一组或者50°、40°一组。
如图1所示,所述减速齿轮组1位于所述双层机架3的中间,即第一级减速中的主轴齿轮11和大齿轮a13和第二级减速中的小齿轮14和大齿轮b15轮以及大齿轮c18均位于第一层机架31的内侧和第二层机架32的外侧。并且第一级减速中的主轴齿轮11和大齿轮a13在沿齿轮轴a12轴向的投影在双层机身3在沿齿轮轴a12轴向的投影区域之内。
如图4所示,所述对称曲柄摇杆机构2由两套单曲柄-单摇杆机构组成,分别为单曲柄单摇杆机构一和单曲柄单摇杆机构二;即由曲柄a21、摇杆a23组成的单曲柄单摇杆机构一和曲柄b22和摇杆b24组成的单曲柄单摇杆机构二组成。
具体来说,所述单曲柄单摇杆机构一和单曲柄单摇杆机构二与所述减速齿轮组1连接并用于驱动单侧翅膀的运动,在所述扑翼飞行机器人中采用两套单曲柄单摇杆机构分别同步驱动左右两侧的两个翅膀,两套机构关于第一层机架31的竖直轴线对称,共同组成对称曲柄摇杆机构。曲柄a21和曲柄b22位于第一层机架31的外侧,曲柄a21通过下方的圆孔与大齿轮c18同时固定在齿轮轴c17上,曲柄b22通过下方的圆孔与大齿轮b16同时固定在齿轮轴b16上。曲柄a21的上端通过铰接点A25与摇杆a23的下端铰接,曲柄b22的上端通过铰接点B26的螺纹孔与摇杆b24的下端铰接;摇杆a23的上端通过铰接点C27与扑翼结构4铰接,摇杆b24的上端通过铰接点D28与扑翼结构4铰接。所述对称曲柄摇杆机构2驱动扑翼机构4实现45-60°的拍动幅度,以尽可能的增加升力。通过调节摇杆a23和摇杆b24的长度可以调节扑动机构的扑动幅度。
总体而言在扑翼机器人中,对称曲柄摇杆机构2和减速齿轮组1通过双层机身3连接在一起共同构成飞行器的总传动机构。
具体来说,通过设置减速齿轮组1与双层机架3的相对位置关系,使第一层机架31和第二层机架31前后包围住减速齿轮组1,实现了对减速齿轮组1一定程度上的保护作用,减少传动机构受到外部冲击受损的可能性。并通过对减速齿轮组1的减速级数简化至二级减速传动,并调整成齿轮的齿数和模数,以及第一级减速齿轮组和第二级减速齿轮组的啮合齿轮轴心连线与竖直轴线的夹角,使传动机构的结构更加简约紧凑,减小了总体尺寸。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种扑翼飞行机器人的传动机构
- 一种扑翼飞行器的三维扑翼机构及微型扑翼飞行器