五轴数控机床直驱转台
文献发布时间:2023-06-19 10:18:07
技术领域
本发明涉及一种机床,特别涉及一种五轴联动系统。
背景技术
五轴联动设备属于数控机床中较普遍的设备,用于复杂结构的零部件的加 工;为了保证最终的加工精度,一般配置高速直连主轴和伺服系统,X、Y、Z 方向配备滚珠丝杠和直线导轨,利用伺服电机直接无级变速驱动,B、C旋转轴 采用伺服电机形成直驱转台,基本上可以保证精度稳定和高动、静态特性。
直驱转台是五轴数控机床的重要组成部分,其转动以及停止锁紧状态直接 影响零部件的加工精度;现有技术中,直驱转台包括B轴组件和C轴组件,B轴组 件由B轴驱动电机驱动B轴主轴转动并使摆臂摆动,从而带动C轴组件摆动,C轴 组件由C轴驱动电机驱动C轴主轴转动并带动工作台转动;使得工作台到达目标 位置则需锁紧已完成零部件的加工;现有技术中,对B轴主轴和C轴主轴的锁紧 通常采用机械式、液压式以及气动锁紧,无论何种锁紧方式,均采用摩擦式刹 车原理,即对主轴从转动到直接停止的过程,该过程要求精度较高,也是影响 零部件加工精度的重要过程。经过长期的摩擦刹车,摩擦副均具有不同程度的 磨损,这种磨损会导致刹车响应与目标位置存在一定的偏差,从而导致机床的 加工精度降低;并且,单纯的通过摩擦形成锁紧的锁紧模式,无法消除转动惯 性在摩擦锁紧条件下造成的位置偏差,即使是无磨损,也无法保证特别高的位 置精度。
因此,应对现有的五轴加工系统的转台总体上进行改进,降低锁紧机构的 工作强度,从而延长锁紧机构的使用周期,并能够较大程度的消除转动惯性在 摩擦锁紧条件下造成的位置偏差,保证转台的位置精度,从而最终保证加工精 度。
发明内容
有鉴于此,本发明的目的提供一种五轴数控机床直驱转台,降低锁紧机构的 工作强度,从而延长锁紧机构的使用周期,并能够较大程度的消除转动惯性在摩 擦锁紧条件下造成的位置偏差,保证转台的位置精度,从而最终保证加工精度。
本发明的五轴数控机床直驱转台,包括B轴组件和C轴组件,所述B轴组 件和C轴组件分别设有磁流变阻尼机构;
所述B轴组件包括B轴驱动电机、由B轴驱动电机驱动的B轴主轴和B轴 锁紧机构,C轴组件包括C轴驱动电机、由C轴驱动电机驱动的C轴主轴和C轴 锁紧机构;
所述磁流变阻尼机构包括阻尼轴、外筒、电磁线圈和电磁线圈控制系统, 所述阻尼轴同轴转动配合套于外筒,且在外筒和阻尼轴之间形成装有磁流变液 的密封空间,所述电磁线圈位于外筒外部并用于在所述密封空间内产生作用于 磁流变液的磁场;所述阻尼轴外圆固定设有多个阻尼杆;
所述B轴组件的磁流变阻尼机构的所述阻尼轴与B轴主轴传动配合;所述C 轴组件的磁流变阻尼机构的所述阻尼轴与C轴主轴传动配合。
进一步,所述电磁线圈控制系统包括检测单元、控制单元和电磁线圈电路, 所述检测单元用于检测B轴主轴和C轴主轴的转动参数,所述控制单元用于接 收所述转动参数并根据转动参数向电磁线圈电路发出开启、关闭或者调整电磁 线圈磁场的命令。
进一步,与B轴主轴传动配合设有B轴尾轴,所述B轴组件的磁流变阻尼 机构的所述阻尼轴与所述B轴尾轴一体成形;与C轴主轴传动配合设有C轴尾 轴,所述C轴组件的磁流变阻尼机构的所述阻尼轴与所述C轴尾轴一体成形。
进一步,所述转动参数包括转速和转角。
进一步,所述锁紧机构为气动锁紧机构。
进一步,所述控制单元在调整电磁线圈磁场的过程为:
在转台接近目标位置到达目标位置的过程中逐渐加大电磁线圈磁场。
进一步,所述B轴驱动电机的转子传动配合外套于B轴主轴,所述B轴尾 轴同轴固定连接于所述B轴主轴的尾端,所述B轴组件的磁流变阻尼机构的检 测单元设置于所述B轴尾轴;
所述C轴驱动电机的转子传动配合外套于C轴主轴,所述C轴尾轴同轴固 定连接于所述C轴主轴的尾端,所述C轴组件的磁流变阻尼机构的检测单元设 置于所述C轴尾轴。
进一步,所述阻尼杆沿径向延伸均匀分布固定于阻尼轴外圆。
本发明的有益效果:本发明为五轴数控机床直驱转台,利用磁流变液的性 质,对B轴组件的主轴以及对C轴组件的主轴在目标位置参数附近时形成阻尼, 减小上述主轴在目标位置附近的转动惯性,降低锁紧机构的工作强度,从而延 长锁紧机构的使用周期,并能够较大程度的消除转动惯性在摩擦锁紧条件下造 成的位置偏差,保证转台的位置精度,从而最终保证加工精度。
附图说明
下面结合附图和实施例对本发明作进一步描述。
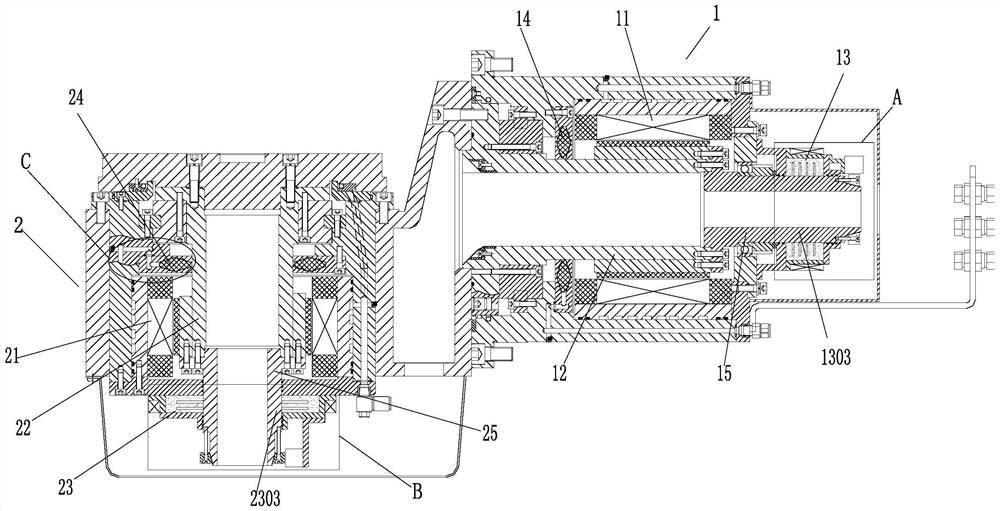
图1为本发明的结构示意图;
图2为图1A处放大图;
图3为图1B处放大图;
图4为磁流变阻尼机构的控制原理图;
图5为本发明的装配结构示意图;
图6为图5中C处放大图;
图7为本发明第一向视图;
图8为本发明第二向视图。
具体实施方式
图1为本发明的结构示意图,图2为图1A处放大图,图3为涂1B处放大 图,图4为磁流变阻尼机构的控制原理图,如图所示:本实施例的五轴数控机 床直驱转台,包括B轴组件和C轴组件,所述B轴组件和C轴组件分别设有磁 流变阻尼机构;
所述B轴组件包括B轴驱动电机11、由B轴驱动电机11驱动的B轴主轴 12和B轴锁紧机构14,C轴组件包括C轴驱动电机21、由C轴驱动电机21驱 动的C轴主轴22和C轴锁紧机构24;
锁紧机构是用于形成制动以及在正常转动时释放主轴的结构,属于转台的 常规机构,在此不再赘述;
当然,B轴组件以及C轴组件还应包括壳体、防护罩、轴承等等一系列零部 件,均属于现有的转台设计,本领域技术人员在均应知道现有技术的转台的基 本结构,因而,在此不再赘述转台的结构以及零部件的连接关系。
如图1、2所示,所述B轴组件的磁流变阻尼机构包括阻尼轴1303、外筒 1302、电磁线圈1301和电磁线圈控制系统,所述阻尼轴1303同轴转动配合套 于外筒1302,且在外筒1302和阻尼轴1303之间形成装有磁流变液的密封空间 1304,所述电磁线圈1301位于外筒1302外部并用于在所述密封空间1304内产 生作用于磁流变液的磁场;所述阻尼轴1303外圆固定设有多个阻尼杆1305;
如图3所示,所述C轴组件的磁流变阻尼机构包括阻尼轴2303、外筒2302、 电磁线圈2301和电磁线圈控制系统,所述阻尼轴2303同轴转动配合套于外筒 2302,且在外筒2302和阻尼轴2303之间形成装有磁流变液的密封空间2304, 所述电磁线圈2301位于外筒2302外部并用于在所述密封空间2304内产生作用 于磁流变液的磁场;所述阻尼轴2303外圆固定设有多个阻尼杆2305;
由此可见,B轴组件的磁流变阻尼机构与C轴组件的磁流变阻尼机构结构原 理基本相同,只是由于B轴组件和C轴组件转动过程以及各个部件的位置关系 具有差别,因而在具体结构上具有外观上的差别,因而,B轴组件的磁流变阻尼 机构与C轴组件的磁流变阻尼机构在本专利中采用统一的技术方案描述,并不 会影响对本方案的理解;
所述B轴组件的磁流变阻尼机构的所述阻尼轴1303与B轴主轴12传动配 合;所述C轴组件的磁流变阻尼机构的所述阻尼轴2303与C轴主轴22传动配 合;
如图所示,外筒一般由筒体很两端的端盖形成,当然,如图2所示,B轴组 件的磁流变阻尼机构的外筒的两侧端部具有端盖封闭,端盖具有穿过阻尼轴的 过孔,可采用现有的密封方式形成密封,在此不再赘述;而图3中,B轴组件的 磁流变阻尼机构的外筒的内侧端部利用B轴组件的形成封闭,采用一般的机械 结构均可实现,在此不再赘述。
电磁线圈产生磁场使得磁流变液从液态逐渐成为具有一定韧性的固态,对 阻尼轴形成阻尼,从而对主轴(B轴主轴和C轴主轴)形成阻尼;正常转动时, 电磁线圈不通电,磁流变液为液体,对阻尼轴以及主轴不形成阻尼;当主轴转 动接近目标位置时,电磁线圈通电,磁流变液逐渐粘稠,距离目标位置越近, 通电强度就越大,最终到达位置时磁场强度最大(当然,也可以直接通稳定的 电流,形成数值不变的磁场,依然具有阻尼效果),结合现有的锁紧机构完成 主轴的锁紧;磁流变液以及电磁线圈的控制属于现有技术,在此不再赘述。
本实施例中,所述电磁线圈控制系统包括检测单元、控制单元和电磁线圈 电路,所述检测单元用于检测B轴主轴和C轴主轴的转动参数,所述控制单元 用于接收所述转动参数并根据转动参数向电磁线圈电路发出开启、关闭或者调 整电磁线圈磁场的命令;即主轴转动接近目标位置时,控制单元(可以是单独 设置的控制器,也可以直接利用机床自带的控制器,均能实现控制的目的)向 电磁线圈电路发出控制命令,开启电路形成通电状态,形成阻尼;到达目标位 置或者正常转动则关闭电路;当然,还根据距离目标位置的距离调整电流的大 小,以形成逐渐加大的阻尼效果,通过控制器控制电磁线圈的磁场开闭以及调整大小,属于现有技术,在此不再赘述;检测单元检测转动参数,可直接利用 转台现有的用于检测主轴转速、转角的传感器、编码器、光栅等;当然,也可 单独另外设置,在此不再赘述。
本实施例中,与B轴主轴12传动配合设有B轴尾轴15,所述B轴组件的磁 流变阻尼机构的所述阻尼轴1303与所述B轴尾轴15一体成形;与C轴主轴传 动配合设有C轴尾轴25,所述C轴组件的磁流变阻尼机构的所述阻尼轴2303与 所述C轴尾轴25一体成形;B轴尾轴15以及C轴尾轴25均起到支撑以及将主 轴转动信号引出的作用,阻尼轴与其一体成形可形成稳定的支撑以及高精度的 传动,同时,还节约使用成本和维修成本。
本实施例中,所述转动参数包括转速和转角,通过相关的传感设备即可实 现,在此不再赘述;根据转速的高低调整磁场大小,可有效降低转动惯性;而 转角则为检测距离目标位置的远近的关键参数;控制器根据转速和转角可较高 精度的控制磁流变液的阻尼程度,从而保证转台的整体精度。
本实施例中,所述锁紧机构为气动锁紧机构,响应速度较快并且具有较小 的内应力;结合阻尼机构的阻尼,二者相互配合相互协调,进一步保证了转台 的转动位置精度;气动锁紧机构一般包括摩擦蹄块、气囊或者活塞以及气缸, 压力气体作用于气缸内的气囊或者活塞驱动摩擦蹄块对主轴行程摩擦制动,整 体气动锁紧结构属于现有技术,在此不再赘述。
本实施例中,所述控制单元在调整电磁线圈磁场的过程为:
在转台接近目标位置到达目标位置的过程中逐渐加大电磁线圈磁场,接近 目标位置指的是人为设定一个位置,该位置时通电产生磁场形成阻尼,继续向 目标位置转动而磁场逐渐增加直至到达目标位置时磁场最大,协助锁紧机构形 成锁紧后,控制器关闭磁场电路。
本实施例中,所述B轴驱动电机的转子传动配合外套于B轴主轴,所述B 轴尾轴同轴固定连接于所述B轴主轴的尾端,所述B轴组件的磁流变阻尼机构 的检测单元设置于所述B轴尾轴;当然,主轴、尾轴、阻尼轴均具有转动支撑, 在此不再赘述;
所述C轴驱动电机的转子传动配合外套于C轴主轴,所述C轴尾轴同轴固 定连接于所述C轴主轴的尾端,所述C轴组件的磁流变阻尼机构的检测单元设 置于所述C轴尾轴。
本实施例中,所述阻尼杆沿径向延伸均匀分布固定于阻尼轴外圆,均匀分 布的阻尼杆可形成稳定的阻尼,并且不会产生偏转力矩。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参 照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可 以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗 旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 用于五轴联动数控机床的直驱转台和五轴联动数控机床
- 摇篮式转台及使用该摇篮式转台的五轴联动数控机床