一种激光除锈喷漆无人机
文献发布时间:2023-06-19 10:21:15
技术领域
本申请涉及无人机技术领域,具体涉及一种激光除锈喷漆无人机。
背景技术
现有技术中,随着高楼大厦的越来越多,高空作业的需求越来越广泛,例如高空除锈或者高空喷漆,目前高空除锈或者高空喷漆都是人力进行手动操作,危险系数很高。
因此,现有技术存在缺陷,急需改进。
发明内容
本申请实施例的目的在于提供一种激光除锈喷漆无人机,可以自动进行高空喷漆除锈,降低人员风险。
本申请实施例提供了一种激光除锈喷漆无人机,包括:无人机本体、激光除锈组件、喷漆组件以及调平衡螺旋桨组件;
所述激光除锈组件以及所述喷漆组件相邻地设置于所述无人机本体的量相对侧,所述调平衡螺旋桨组件设置于所述喷漆组件的相对侧;
所述无人机本体内设置有主控电路以及无线通信电路,所述主控电路分别与所述激光除锈组件、喷漆组件、调平衡螺旋桨组件以及所述无线通信电路电连接;
所述主控电路通过所述无线通信电路接收操作终端的第一控制信号以及第二控制信号,并基于所述第一控制信号控制所述无人机本体飞行至预设位置进行激光除锈操作,并基于所述第二控制信号控制喷漆组件以第一预设喷漆速率进行喷漆处理,同时控制所述调平衡螺旋桨组输出与所述第一预设喷漆速率对应的反推力,从而使得所述无人机本体保持平衡。
可选地,在本申请实施例所述的激光除锈喷漆无人机中,还包括摄像头组件,所述摄像头组件与所述主控电路连接,以用于采集所述预设位置的影像信息,并通过所述无线通信电路将所述影像信息发送至操作终端。
可选地,在本申请实施例所述的激光除锈喷漆无人机中,还包括距离检测传感器,所述距离检测传感器与所述主控电路电连接并设置于所述无人机本体上,所述距离检测传感器用于检测所述预设位置与所述无人机本体的距离信息,并将所述距离信息通过所述无线通信电路发送至操作终端,所述主控主控电路还用于根据所述距离信息控制所述激光除锈组件发出的激光的功率。
可选地,在本申请实施例所述的激光除锈喷漆无人机中,还包括风速检测组件以及风向检测组件;所述风速检测组件以及风向检测组件均设置于所述无人机本体上,并与所述主控电路电连接;
所述风速检测组件用于检测风速信息;
所述风向检测组件用于检测风向信息;
所述主控电路用于根据所述风向信息以及所述风速信息调整所述风速检测组件的喷漆速率以及喷漆方向,以使得所述喷漆组件喷出的油漆垂直喷洒在待喷漆的平面上的与所述喷漆组件的喷嘴相互正对的位置。
可选地,在本申请实施例所述的激光除锈喷漆无人机中,所述无线通信电路为GPRS通信电路。
由上可知,本申请实施例提供的激光除锈喷漆无人机通过在其上设置激光除锈组件、喷漆组件从而可以实现高空激光除锈或者高空喷漆操作,无需人员高空作业,可以降低人员风险,并且由于设置了调平衡螺旋桨组件,使得在高空喷漆过程中无人机本体可以保持平衡,可以提高喷漆的均匀性。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
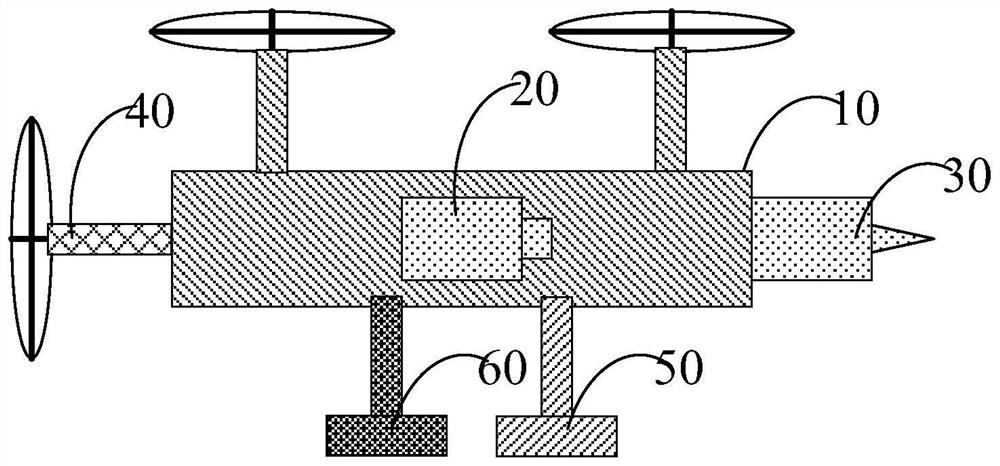
图1是本申请一些实施例中的一种激光除锈喷漆无人机的结构示意图。
图2是本申请一些实施例中的一种激光除锈喷漆无人机的电路原理图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述。
在本申请的描述中,需要说明的是,术语“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
还需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请中的具体含义。
请参照图1以及图2,图1是本申请一些实施例中的一种激光除锈喷漆无人机的结构示意图,图2是本申请一些实施例中的一种激光除锈喷漆无人机的电路原理图。其中,该激光除锈喷漆无人机,包括:无人机本体10、激光除锈组件20、喷漆组件30以及调平衡螺旋桨组件40。
其中,该激光除锈组件20以及所述喷漆组件30相邻地设置于所述无人机本体10的量相对侧,所述调平衡螺旋桨组件40设置于所述喷漆组件30的相对侧;所述无人机本体10内设置有主控电路11以及无线通信电路12,所述主控电路11分别与所述激光除锈组件20、喷漆组件30、调平衡螺旋桨组件40以及所述无线通信电路12电连接。主控电路11通过所述无线通信电路12接收操作终端的第一控制信号以及第二控制信号,并基于所述第一控制信号控制无人机本体10飞行至预设位置进行激光除锈操作,并基于所述第二控制信号控制喷漆组件30以第一预设喷漆速率进行喷漆处理,同时控制所述调平衡螺旋桨组件40输出与所述第一预设喷漆速率对应的反推力,从而使得所述无人机本体10保持平衡。
其中,该无人机本体10与现有技术中的拍照无人机或者送货无人机的结构类似,在此不过多描述。该主控电路11内具有处理器以及存储器等,从而进行调用存储器内的计算机程序来执行对应的软件操作。激光除锈组件20为现有技术中的激光除锈装置,只不过其体积和重量相对较小,以便于适配无人机本体的负载能力。该喷漆组件30与现有技术中的电控喷漆装置的结构相同,只不过其体积和重量相对较小,以便于适配无人机本体的负载能力。调平衡螺旋桨组件40用于相对于该喷漆组件30的喷漆方向的反向喷气,从而使得该无人机本体保持平衡。
可以理解地,在一些实施例中,激光除锈喷漆无人机中,还包括摄像头组件,所述摄像头组件与所述主控电路连接,以用于采集所述预设位置的影像信息,并通过所述无线通信电路将所述影像信息发送至操作终端。
可以理解地,在一些实施例中,激光除锈喷漆无人机中,还包括距离检测传感器,所述距离检测传感器与所述主控电路电连接并设置于所述无人机本体上,所述距离检测传感器用于检测所述预设位置与所述无人机本体的距离信息,并将所述距离信息通过所述无线通信电路发送至操作终端。所述主控主控电路还用于根据所述距离信息控制所述激光除锈组件发出的激光的功率,从而使得达到目标位置的激光的功率足够,既保证了除锈的精准度,也可以降低功耗。
可以理解地,在一些实施例中,激光除锈喷漆无人机中,还包括风速检测组件50以及风向检测组件60;所述风速检测组件50以及风向检测组件60均设置于所述无人机本体10上,并与所述主控电路11电连接。所述风速检测组件用于检测风速信息;所述风向检测组件用于检测风向信息。所述主控电路用于根据所述风向信息以及所述风速信息调整所述风速检测组件的喷漆速率以及喷漆方向,以使得所述喷漆组件喷出的油漆垂直喷洒在待喷漆的平面上的与所述喷漆组件的喷嘴相互正对的位置。从而避免喷漆喷错位置以及喷漆不牢固。
可以理解地,在一些实施例中,无线通信电路为GPRS通信电路。当然,可以理解地,该无线通信电路还可以采用其他短波通信方式。
由上可知,本申请实施例提供的激光除锈喷漆无人机通过在其上设置激光除锈组件、喷漆组件从而可以实现高空激光除锈或者高空喷漆操作,无需人员高空作业,可以降低人员风险,并且由于设置了调平衡螺旋桨组件,使得在高空喷漆过程中无人机本体可以保持平衡,可以提高喷漆的均匀性。
以上所述仅为本申请的实施例而已,并不用于限制本申请的保护范围,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
- 一种激光除锈喷漆无人机
- 一种激光除锈无人机