一种驾驶杆解耦结构
文献发布时间:2023-06-19 10:21:15
技术领域
本申请属于飞机驾驶杆技术领域,特别涉及一种驾驶杆解耦结构。
背景技术
飞机驾驶杆是一种用于操纵飞机升降舵和副翼进行运动的机构或装置,由于飞机姿态通常包括俯仰、滚转和偏航等,因此驾驶杆需要完成俯仰和滚转控制,要求控制机构之间彼此独立、互不打扰。
现有技术中的驾驶杆解耦机构复杂,解耦机构重量大、占用空间大,不利于解耦机构在飞机中的布置。
发明内容
本申请的目的是提供了一种驾驶杆解耦机构,以解决或减轻背景技术中的至少一个问题。
本申请的技术方案是:一种驾驶杆解耦机构,所述驾驶杆解耦机构包括:
支座;
具有竖向部和横向部的滚转传动摇臂,竖向部与横向部成预定角度的结合在一起,所述滚转传动摇臂以结合点可转动的与支座连接;
具有转动端和拉伸端的叉形组件,叉形组件的转动端可转动的连接于滚转传动摇臂的竖向部,叉形组件的拉伸端通过万向节连接竖向设置的俯仰传动拉杆,俯仰传动拉杆通过俯仰传动摇臂连接横向设置的俯仰控制拉杆;
竖向设置的滚转传动拉杆连接于滚转传动摇臂的横向部,滚转传动拉杆通过滚转传动摇臂连接横向设置的滚转控制拉杆。
进一步的,所述转动端的轴线与俯仰操作旋转轴的轴线重合;所述拉伸端的轴线与滚转操作旋转轴的轴线重合。
进一步的,所述支座的两侧分别设有容纳空间,俯仰传动拉杆和俯仰传动摇臂设置于一侧的容纳空间内,滚转传动拉杆和滚转传动摇臂设置于另一侧的容纳空间内。
进一步的,所述俯仰传动摇臂具有用于与俯仰传动拉杆连接的俯仰摇臂横向部和用于与俯仰控制拉杆连接的俯仰摇臂竖向部,俯仰摇臂横向部和俯仰摇臂竖向部成预定角度的结合在一起。
进一步的,所述俯仰传动摇臂以结合点可转动的设置在支座上。
进一步的,所述滚转传动摇臂具有用于与滚转传动拉杆连接的滚转摇臂横向部和用于与滚转控制拉杆连接的滚转摇臂竖向部,滚转摇臂横向部和滚转摇臂竖向部成预定角度的结合在一起。
进一步的,所述滚转传动摇臂以结合点可转动的设置在支座上。
进一步的,所述俯仰控制拉杆与滚转控制拉杆在所述支座的下端平行。
本申请所提供的驾驶杆解耦机构在能够实现飞机俯仰与滚转控制的前提下,可以使俯仰操纵和滚转操纵互不干扰,且可靠性高、体积小、重量轻。
附图说明
为了更清楚地说明本申请提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本申请的一些实施例。
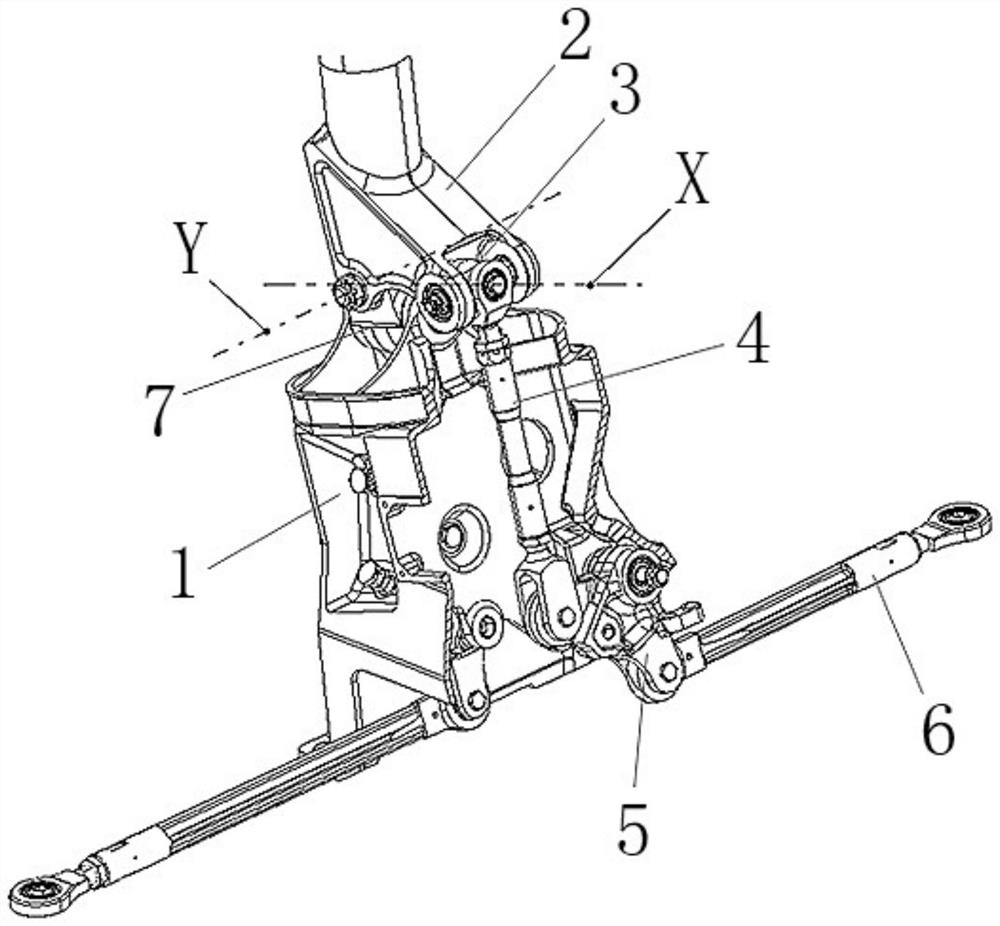
图1为本申请中的驾驶杆解耦机构俯仰传动部件示意图;
图2为本申请中的驾驶杆解耦机构俯仰传动部件爆炸图;
图3为本申请中的万向节组件安装示意图;
图4为本申请中的驾驶杆解耦机构滚转传动部件示意图;
图5为本申请中的驾驶杆解耦机构滚转传动部件爆炸图。
附图标记:
1-支座;
2-叉形组件;
3-万向节;
4-俯仰传动拉杆;
5-俯仰传动摇臂;
6-俯仰传动拉杆;
7-滚转传动摇臂;
8-滚转传动拉杆;
9-滚转传动摇臂;
10-滚转传动拉杆;
X-滚转操作旋转轴;
Y-俯仰操作旋转轴。
具体实施方式
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行更加详细的描述。
为了克服现有技术中的驾驶杆解耦装置复杂度高等问题,本申请中提供了一种结构简单、体积小巧的驾驶杆解耦机构。
如图1至图5所示,本申请提供的驾驶杆解耦机构主要包括支座1、叉形组件2、万向节3、俯仰传动拉杆4、俯仰传动摇臂5、俯仰控制拉杆6、滚转传动摇臂7、滚转传动拉杆8、滚转传动摇臂9、滚转控制拉杆10。
支座1为解耦机构的主体结构。
滚转传动摇臂7具有竖向部71和横向部72,竖向部71与横向部72大致成L形状接近90度的结合在一起,滚转传动摇臂7以结合点位置可转动的安装在与支座1上,使得滚转传动摇臂7可沿滚转操纵旋转轴X旋转。
叉形组件2具有转动端21和拉伸端22,叉形组件2与驾驶杆固定在一起,其转动端21与滚转传动摇臂7安装在一起,使叉形组件2可沿俯仰操纵旋转轴Y旋转;叉形组件2的转动端21通过万向节3连接大致竖向设置的俯仰传动拉杆4。万向节3安装在叉形组件2的转动端21内轴承上,万向节3可沿自身轴线旋转。俯仰传动拉杆4与万向节3安装在一起,使俯仰传动拉杆4在竖向平面内可实现摆动即沿着万向节3与俯仰传动拉杆4之间的连接螺栓的轴线旋转。俯仰传动摇臂5通过连接螺栓设置在支座1上,其可沿连接螺栓的轴线旋转,俯仰传动摇臂5的输入端与俯仰传动拉杆4连接,俯仰传动摇臂5的输出端与俯仰控制拉杆6连接。
滚转传动摇臂7的横向部72与大致竖向设置的滚转传动拉杆8连接在一起。滚转传动摇臂9通过连接螺栓设置在支座1上,其同样可沿连接螺栓的轴线旋转,滚转传动摇臂9的输入端与滚转传动拉杆8连接,滚转传动摇臂9的输出端与滚转控制拉杆10连接。
在本申请中,叉形组件2的转动端21的轴线与俯仰操作旋转轴的轴线重合,拉伸端22的轴线与滚转操作旋转轴的轴线重合。
在本申请中,支座1的两侧分别设有容纳空间,俯仰传动拉杆4和俯仰传动摇臂5等俯仰控制部件设置于一侧的容纳空间内,滚转传动拉杆8和滚转传动摇臂9等滚转控制部件设置于另一侧的容纳空间内。
俯仰传动摇臂5具有用于与俯仰传动拉杆4连接的俯仰摇臂横向部51和用于与俯仰控制拉杆6连接的俯仰摇臂竖向部52,俯仰摇臂横向部51和俯仰摇臂竖向部52成预定角度的结合在一起。其中,俯仰传动摇臂5在结合点位置通过例如连接螺栓铰接等方式可转动的设置在支座1上。
滚转传动摇臂9具有用于与滚转传动拉杆8连接的滚转摇臂横向部91和用于与滚转控制拉杆10连接的滚转摇臂竖向部92,滚转摇臂横向部91和滚转摇臂竖向部92成预定角度的结合在一起。其中,滚转传动摇臂9在结合点位置通过例如连接螺栓铰接等方式可转动的设置在支座1上。
在本申请优选实施例中,俯仰控制拉杆6与滚转控制拉杆10在支座1的下端大致的平行。
如图1所示,在进行俯仰操纵时,驾驶杆前后操作,叉形组件2带动万向节3绕俯仰操纵旋转轴Y转动,进而带动俯仰传动拉杆4上下运动,驱动俯仰传动摇臂5绕其自身的固定转轴旋转,使俯仰控制拉杆6横向移动,最终通过俯仰控制拉杆6将操纵动作传递出驾驶杆组件,此时滚转传动摇臂5保持静止状态,滚转操纵无指令输出。
如图4所示,在进行滚转操纵时,驾驶杆左右操作,叉形组件2带动滚转传动摇臂7绕滚转操作旋转轴X偏转,从而带动滚转传动拉杆8上下运动,驱动滚转传动摇臂9绕自身的固定转轴旋转,使滚转控制拉杆10横向移动,最终通过滚转控制拉杆10将操纵动作传递出驾驶杆组件,此时由万向节3保证俯仰传动拉杆4保持静止状态,俯仰操纵无指令输出。
本申请所提供的驾驶杆解耦装置利用同心原理,使俯仰操纵和滚转操纵互不干扰,可靠性高、体积小、重量轻。
需要说明的是,本申请中“竖向”、“横向”等表示方向的属于仅示意性的表示基于附图或零部件,不代表在真实环境中绝对的横向或竖向。
需要说明的是,在本申请的描述中,术语“竖向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
- 一种驾驶杆解耦结构
- 一种驾驶杆手柄与驾驶杆接口结构