一种基于改进均值滤波法的MPO光纤连接器检测系统
文献发布时间:2023-06-19 10:22:47
技术领域:
本发明涉及一种改进均值滤波法的MPO光纤连接器检测系统,本方法通过对均值滤波法、重心法进行改进,利用白光干涉原理,运用三次样条插值、四向法均值滤波实现工厂环境下的MPO光纤连接器检测,属于3D测量领域。
背景技术:
白光垂直扫描干涉技术相对于传统的无损检测方法,具有非接触、精度高、测量时间短等特点,被广泛应用于精密无损检测领域。目前多数MPO光纤连接器检测系统应用于工厂测量,测量时产生大量的灰尘落在光纤连接器表面,在复原光纤连接器表面形貌时会产生很大的噪声干扰,而均值滤波只能对单张图片进行处理,且不能达到好的降噪效果,本发明对均值滤波法、重心法进行改进,应用三次样条插值法、四向法均值滤波可以去除因工厂操作环境引入的噪声,提高光纤连接器表面3D图像复原的精确度。
发明内容:
本发明提供一种改进均值滤波法的MPO光纤连接器检测,本方法运用基于Michelson型干涉仪的测量系统对MPO光纤连接器进行扫描,CCD相机拍摄干涉条纹的图像并存储到计算机中,运用MATLAB读取图像数据,改进重心法利用三次样条插值的方法对图像单个像素点的包络线峰值点进行提取,阈值法精准定位噪声点位置,对指定噪声点应用改进均值滤波法进行处理,去除因工厂操作环境引入的噪声,提高光纤连接器表面3D图像复原的精确度。
本发明专利通过以下方案予以实现:
一种改进均值滤波法的MPO光纤连接器检测方法,由基于Michelson型干涉仪的测量系统扫描MPO光纤连接器获得扫描图像,用三次样条插值法提取包络线峰值点,四向法均值滤波法进行3D图像降噪,提高光纤连接器表面3D图像复原的精确度。扫描图像由基于Michelson型干涉仪的测量系统扫描获得扫描图像,通过提取每个像素点的灰度值、利用三次样条插值实现包络线峰值点的快速、准确提取,获得扫描区域各个点表面的高度值。改进均值滤波法通过阈值法定位噪声位置、“四向法”滤波来实现对3D图像的去噪,提高光纤连接器表面的3D复原的准确度。
(1)所述的基于Michelson型干涉仪的测量系统原理如下:
测量系统的原理是单色光的干涉,如果系统的分光器到被测表面上某一点的距离与分光器到参考面的距离相等,则所对应的两列光波的光程差为零,此时干涉光强值达到最大。当光源满足振动方向、频率相同、相位差恒定的相干条件,光在空间里相遇会发生干涉现象,生成明暗交替的稳定条纹。
当两束单色光(位置为S
设O点到A
当进行粗糙表面的测量时,我们就通过检测光强的变化来测出被检测物体表面的粗糙程度。使用基于Michelson型干涉仪的测量系统可以有效减少模糊误差,有效增大测量的范围,且不受表面高度突变的影响。
(2)所述的基于Michelson型干涉仪的测量系统实现过程如下:
以Michelson干涉实验的白光干涉仪为原型,设置一款新的基于Michelson型干涉仪的测量系统,该白光扫描干涉仪主要由白光光源、分光棱镜、参考镜、PZT控制仪、CCD相机、移动硬盘等组成,具有MPO光纤连接器专门的接口,方便MPO光纤连接器的表面检测。设置工作台移动的步距,PZT控制仪驱动工作台每向前移动一个步距,扫描图像像素点的光强值就会发生改变,CCD就会产生一张扫描图片,将图片信息记录存储到移动硬盘中。
基于Michelson型干涉仪的测量系统工作步骤如下:
光源经过准直器后照射到被测试样上,被测试样被安置在工作平台上,通过PZT控制仪控制CCD感光元件沿着光学z轴方向进行移动。PZT控制仪控制其每次只移动60nm,工作平台每移动一步,则采集一帧图像。光束被分光棱镜一分为二,其中一束光照射到被测试样上,作为目标光束,而另一束光被引导照射到参考镜上。参考光束和目标光束反射后,当它们之间的光程差处于光源相干范围内时,就会在空间发生干涉。通过成像物镜后干涉条纹图像被CCD感光元件记录下来,并将记录的图像储存在移动硬盘中以待后续的处理。
(3)所述的改进重心法算法如下:
对于扫描图像上待处理的M个像素点,M为扫描图像像素点的总个数,每个像素点可获得N个数据点[x
D=x
D为第k个像素点的实际高度值,b为CCD相机单次移动的步距。
I.三次样条插值曲线的算法原理如下:
在区间[m,n]上给定一组数据点m=x
a.在每个分段区间[x
b.满足S(x
c.S(x),S′(x),S″(x),在[m,n]区间都是连续的,即S(x)曲线是光滑的。
所以n个三次多项式分段可以写作:
S
其中a
II.由上述原理推导得三次样条插值曲线表达式具有如下性质:
a.插值和连续性
S(x
S(x
b.微分连续性
S′
S″
样条曲线的积分式:
S
S′
S″
III.将步长h
得到三次样条插值曲线的系数为:
在每个子区间x
g
即可得到每个子区间的三次样条插值曲线。
(4)所述的改进均值滤波法算法如下:
取一张未发生干涉现象的图像进行灰度值读取,通过查找图像灰度值异常的位置,精准定位噪声的位置,将位置坐标返回到矩阵C,通过位置坐标在三次样条插值后获得的高度值矩阵对每个噪声点进行定位,对每个噪声点进行处理,分别取噪声点的上、下、左、右各5个数据共20个数据点的值进行均值滤波,将得到的值替换掉噪声点的值,即可去除工厂中灰尘杂质引入的噪声,提高MPO光纤连接器3D形貌复原的精确度。
具体实现方法如下:
假设有M个噪声点,[x
完成M次替换后,即可去除引入的噪声,提高MPO光纤连接器表面形貌的3D复原的精确度。
附图说明:
图1为本发明专利的MPO光纤连接器的实物结构图。
图2为本发明专利基于Michelson型干涉仪测量系统的原理示意图。
图3为本发明专利基于Michelson型干涉仪测量系统的实物结构图。
图4为本发明专利的改进重心法的算法流程图。
图5为本发明专利的改进均值滤波法的算法流程图。
图6为本发明专利应用前后的对比3D复原图像。
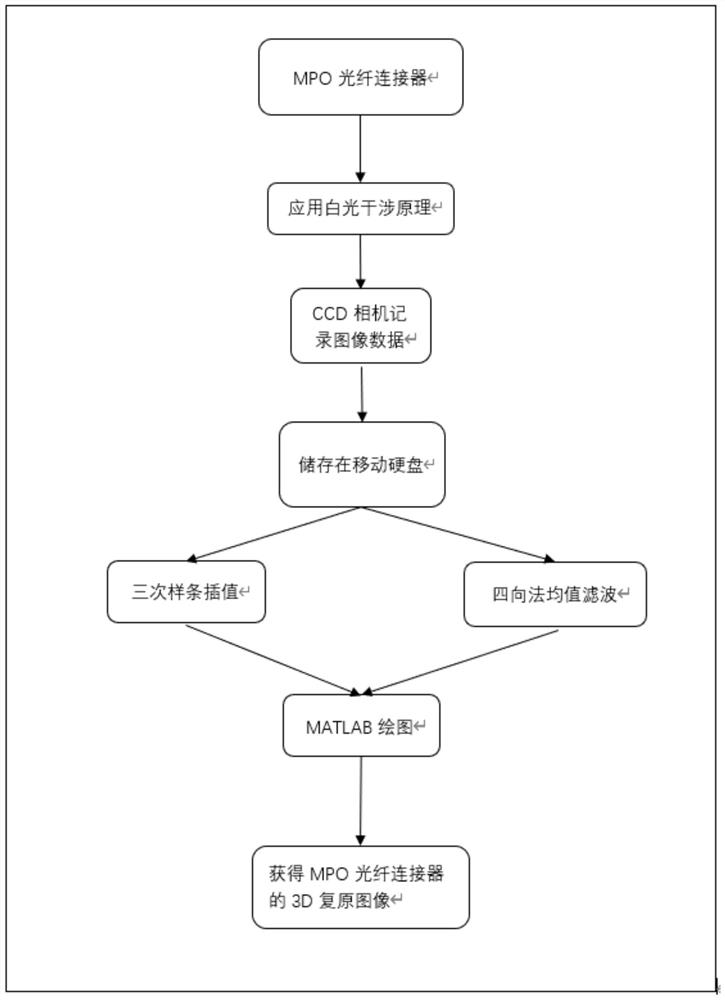
图7为本发明专利MPO光纤检测系统的整体流程图。
具体实施方式:
结合附图对本发明专利进一步说明。
本发明专利是一种基于改进均值滤波法、改进重心法的MPO光纤连接器检测系统,由基于Michelson型干涉仪的测量系统,改进重心法算法、改进均值滤波法算法来实现,图1为MPO光纤连接器的实物结构图,工厂操作环境下会使MPO光纤连接器表面被污染,影响MPO光纤连接器3D复原的准确度。
图2为基于Michelson型干涉仪测量系统的原理示意图,光源经过准直器后照射到光纤连接器上,光纤连接器插在工作平台上,通过PZT控制仪驱动工作台向前移动,移动步距为60nm。光束被分光镜一分为二,其中一束光照射到光纤连接器上,作为目标光束,而另一束光被引导照射到参考镜上。参考光束和目标光束反射后,当它们之间的光程差处于光源相干范围内时,就会在空间发生干涉。通过成像物镜后干涉条纹图像被CCD摄像机记录下来,储存在移动硬盘中。
图3为本发明专利基于Michelson型干涉仪测量系统的实物结构图,结构1为白光光源发生器,用于为干涉提供光源;结构2为MPO光纤连接器插口,作为承载光纤连接器的工作平台;结构3为PZT控制仪,用于驱动工作平台向前移动;结构4为参考镜,用于与目标光束发生白光干涉;结构5为分光棱镜,用于将光束一分为二,分给输送到参考镜和光纤连接器;结构6为CCD相机,用于记录干涉条纹的图像;结构7为移动硬盘,用于存储CCD摄像机的扫描图像。
图4为本发明专利的改进重心法的算法流程图,利用三次样条插值的方法对扫描区域的M个像素点的M×N组数据进行插值处理,使得扫描区域的单个像素点由N组数据点扩充为10N组数据点,并进行包络线峰值点的提取,获得扫描区域M个像素点的高度值,相比于原有重心法提高了算法精确度。
图5为本发明专利的改进均值滤波法的算法流程图,取未发生白光干涉的图像进行灰度值提取,利用阈值法对光纤连接器表面的杂质进行定位,获得位置坐标,将位置坐标代入三次样条插值后获得的高度值矩阵进行定位,利用均值滤波的原理,噪声点[x
图6为本发明专利应用前后的对比3D复原图像,可见噪声明显减弱,去除噪声效果较好,MPO光纤连接器3D形貌复原效果得到明显改善。
图7为本发明专利MPO光纤检测系统的整体流程图,通过应用白光干涉原理设计基于Michelson型干涉仪的测量系统,对MPO光纤连接器的表面进行扫描,利用CCD相机拍摄干涉条纹图像,储存在移动硬盘中。使用MATLAB对移动硬盘的图像数据进行处理,改进重心法,利用三次样条插值方法扩充数据点的个数,精准定位像素点的高度位置。改进均值滤波法,用阈值法定位噪声位置,“四向法”均值滤波去除噪声点,最后获得去除噪声点的高度值矩阵,利用MATLAB软件进行绘图,获得光纤连接器表面的3D复原图像。
本发明的目的在于提供一种基于改进均值滤波法的MPO光纤连接器检测系统,本系统分为硬件部分和软件部分,硬件部分为基于Michelson型干涉仪测量系统,应用白光干涉原理,软件部分为基于三次样条插值算法对原有重心法进行优化,基于均值滤波的原理,采用四向法对光纤连接器的表面进行均值滤波。本方法适用于在工厂操作环境下,光纤连接器表面受到杂质的污染,去除这种污染可以大幅提高3D表面形貌复原的准确性,具有很大的应用前景。
- 一种基于改进均值滤波法的MPO光纤连接器检测系统
- 一种基于电桥法和直流漏电流法的智能变电站一体化电源绝缘检测系统