一种自浮式海上无人机及其落水搜救系统
文献发布时间:2023-06-19 10:22:47
技术领域
本发明涉及海上无人机搜救技术领域,具体为一种自浮式海上无人机及其落水搜救系统。
背景技术
近年来,相对于传统的海上船艇作业方式,无人机具有机动灵活、飞行区域广、视角开阔、经济便捷、操作简便、有效降低人命风险等优势,在海上监管和应急处置、搜寻救助中的应用已愈发受到海事和救捞部门的关注。海事部门以及海上救助部门已经利用电动多旋翼无人机进行了一定的海上航拍、溢油监测、船舶尾气检测等方面的探索应用,但由于海上复杂的气象环境制约,无人机受风影响遇险落水风险较大,因而无人机主要用于天气条件良好情况下的近海岸线飞行航拍,尚未有更深入的应用。飞行平台抗风性和安全保障无法满足需求等问题还存在,使得海上无人机应用还是本领域技术应用的短板,海上民用无人机搜寻救助应用尚处在初级尝试阶段。
经检索,中国专利公开号为CN109358653A的发明专利公开了一种海上无人机分布式智能搜救系统,所述搜救系统包括无人机和搜救船,所述无人机设置在搜救船上,无人机的控制单元为搜救船控制器的子模块,控制器作为总的控制中心,可实现对多个控制单元的控制,即无人机的数量超过两个,实现分布式搜索,搜索效果更好。上述专利存在一下不足:1.利用船上无人机搜救落水无人机,船上无人机在搜救的过程中依然存在落水的风险;2.多台无人机虽然能扩大搜救范围,同时带来的是搜救成本的增加;3.落水无人机很可能因海上恶劣的环境沉入海底,即使找到无人机的位置也无法进行打捞作业。鉴于此,我们提出一种自浮式海上无人机及其落水搜救系统。
发明内容
本发明的目的在于提供一种自浮式海上无人机及其落水搜救系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种自浮式海上无人机,所述无人机包括机身和机翼,所述机翼设置在所述机身的两侧,两所述机翼上均设置有垂直起降臂,所述机身通过碳复合PVC泡沫材质制成;
所述机翼通过凯夫拉复合PVC泡沫材质制成;
所述垂直起降臂通过3K碳纤维材质制成。
本发明还提供一种落水搜救系统,用于所述的无人机的搜救作业,所述落水搜救系统包括:无人机、北斗卫星发射器、AIS基站、指挥端和多个AIS船舶终端;
所述无人机上安装有北斗定位系统,用于发送北斗定位信息和短报文;
所述北斗卫星发射器通过北斗卫星与所述无人机上的北斗定位系统通信连接,用于发送所述无人机的北斗定位信息;
所述指挥端通过服务器与北斗卫星发射器通信连接,用于接收所述无人机的北斗定位信息;
所述指挥端的服务器还通过所述AIS基站与所述AIS船舶终端通信连接,用于接发经AIS基站发送的AIS船舶终端的AIS识别信息;
所述指挥端对接收的所述无人机的北斗定位信息以及所述AIS船舶终端的AIS识别信息进行处理,并结合风向、洋流、船舶速度等信息进行分析建模,将所述无人机的北斗定位信息和AIS指令发送给所述无人机附近的AIS船舶终端,使得落水的无人机被就近的AIS船舶终端打捞。
优选的,所述指挥端就近发送北斗定位信息和AIS指令包括以下步骤:
步骤1:所述指挥端通过所述AIS基站接收所述AIS船舶终端的AIS识别信息,并将AIS识别信息存储至船舶数据存储模块内,所述AIS识别信息包括所述AIS船舶终端所在位置的经纬度信息;
步骤2:所述指挥端将接收的无人机的北斗定位信息存储至北斗数据存储模块内,并从北斗定位信息中提取所述无人机所在位置的经纬度信息;
步骤3:所述指挥端根据所述无人机所在的经纬度信息,以所述无人机所在位置为中心,筛选附近AIS船舶终端的经纬度信息;
步骤4:根据筛选出的无人机附近船舶终端经纬度信息,以及所述无人机漂流位置所在的经纬度信息,选定距离所述无人机预计漂浮位置最近的AIS船舶终端,并将所述无人机的经纬度信息发送给该距离最近的AIS船舶终端,实现无人机的就近打捞作业。
优选的,步骤1中,所述AIS船舶终端为装备AIS系统的船舶,所述指挥端通过AIS网络采集船舶位置信息。
优选的,步骤2中,所述无人机为装备北斗定位系统的无人机,所述指挥端通过北斗网络接收所述无人机的北斗定位信息。
优选的,步骤3中,以所述无人机所在位置为中心,5-10海里为半径进行AIS船舶终端的筛选。
优选的,所述指挥端结合风向、洋流、船舶速度信息进行分析建模,并选定距离所述无人机预计漂浮位置最近的AIS船舶终端,所用算法模型如下:
其中:i为第i架无人机;n为第i架无人机落水位置周围水域过往的船舶数量,n的数量大小与落水水域的地理位置、时间、船舶交通流密度以及寻找执行打捞任务的搜救范围的大小等因素有关;Pr
影响Pr
Pr
其中:d
综上所述,求解最优化问题(1)转化为求解Pr
其中:α
d'
其中d'
c'
与现有技术相比,本发明的有益效果是:
1.该自浮式海上无人机,通过自身材料的特性,不仅满足恶劣的海上作业环境,且在落水后可以漂浮在海面上,便于进行搜救和打捞作业;
2.该落水搜救系统,通过在无人机上安装有北斗定位系统,实现精准的定位,同时指挥部根据无人机落水位置,将落水位置发送给距离最近的AIS船舶终端进行搜救和打捞,降低打捞成本的同时,避免多只船舶进行搜救时存在碰撞风险,搜救过程安全可靠。
附图说明
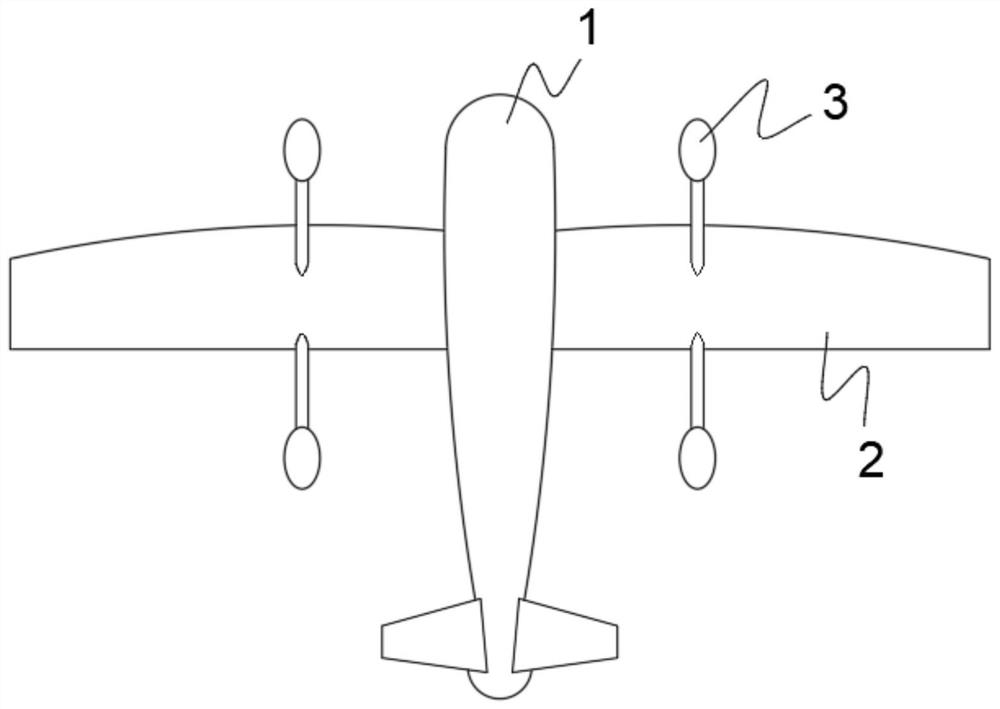
图1为本发明实施例1中自浮式无人机的结构俯视图;
图2为本发明实施例2中落水搜救系统的结构示意图;
图3为本发明实施例2中落水搜救系统的结构框图;
图4为本发明中施例2中AIS船舶终端就近搜救的方法流程图。
图中:1、机身;2、机翼;3、垂直起降臂;4、无人机;5、北斗卫星发
射器;6、AIS基站、7、服务器;8、AIS船舶终端。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
一种自浮式海上无人机,如图1所示,无人机包括机身1和机翼2,机翼2设置在机身1的两侧,两机翼2上均设置有垂直起降臂3,机身1通过碳复合PVC泡沫材质制成;机翼2通过凯夫拉复合PVC泡沫材质制成;垂直起降臂3通过3K碳纤维材质制成,使得无人机在落水的状况下能漂浮在水面,且通过复合材料使得机身1和机翼2具有更好的强度,便于适应海上复杂的飞行环境,且落水后漂浮水面便于后期的搜救打捞,本实施例中无人机整机的净重量为3.8kg。
实施例2
如图2和图3所示,一种落水搜救系统,用于所述的无人机的搜救作业,落水搜救系统包括:无人机4、北斗卫星发射器5、AIS基站6、指挥端7和多个AIS船舶终端8;
无人机4上安装有北斗定位系统,用于发送北斗定位信息和短报文;
北斗卫星发射器通过北斗卫星与无人机4上的北斗定位系统通信连接,用于发送无人机4的北斗定位信息;
指挥端7通过服务器与北斗卫星发射器通信连接,用于接收无人机4的北斗定位信息;
指挥端7的服务器还通过AIS基站6与AIS船舶终端8通信连接,用于接发经AIS基站6发送的AIS船舶终端8的AIS识别信息;
指挥端7对接收的无人机4的北斗定位信息以及AIS船舶终端8的AIS识别信息进行处理,并结合风向、洋流、船舶速度等信息进行分析建模,将无人机4的北斗定位信息和AIS指令发送给无人4机附近的AIS船舶终端8,使得落水的无人机4被就近的AIS船舶终端8打捞。
如图4所示,指挥端7就近发送北斗定位信息和AIS指令包括以下步骤:
步骤1:指挥端7通过AIS基站6接收AIS船舶终端8的AIS识别信息,并将AIS识别信息存储至船舶数据存储模块内,AIS识别信息包括AIS船舶终端8所在位置的经纬度信息;
步骤2:指挥端7将接收的无人机4的北斗定位信息存储至北斗数据存储模块内,并从北斗定位信息中提取无人机4所在位置的经纬度信息;
步骤3:指挥端7根据无人机4所在的经纬度信息,以无人机4所在位置为中心,筛选附近AIS船舶终端8的经纬度信息;
步骤4:根据筛选出的无人机4附近船舶终端经纬度信息,以及无人机4漂流位置所在的经纬度信息,选定距离无人机4预计漂浮位置最近的AIS船舶终端8,并将无人机4的经纬度信息发送给该距离最近的AIS船舶终端8,实现无人机4的就近打捞作业。
步骤1中,AIS船舶终端8为装备AIS系统的船舶,指挥端7通过AIS网络采集船舶位置信息。
步骤2中,无人机4为装备北斗定位系统的无人机,指挥端7通过北斗网络接收无人机4的北斗定位信息。
步骤3中,以无人机4所在位置为中心,5-10海里为半径进行AIS船舶终端8的筛选。
值得搜明的是,指挥端7结合风向、洋流、船舶速度信息进行分析建模,并选定距离无人机4预计漂浮位置最近的AIS船舶终端8,所用算法模型如下:
其中:i为第i架无人机;n为第i架无人机落水位置周围水域过往的船舶数量,n的数量大小与落水水域的地理位置、时间、船舶交通流密度以及寻找执行打捞任务的搜救范围的大小等因素有关;Pr
影响Pr
Pr
其中:d
综上,求解最优化问题(1)转化为求解Pr
其中:α
本发明的自浮式海上无人机在使用时,由于无人机4的机身1通过碳复合PVC泡沫材质制成,机翼2通过凯夫拉复合PVC泡沫材质制成,垂直起降臂3通过3K碳纤维材质制成,使得无人机在落水的状况下能漂浮在水面,且通过复合材料使得机身1和机翼2具有更好的强度,便于适应海上复杂的飞行环境,且落水后漂浮水面便于后期的搜救打捞;
本发明的用于海上无人机的落水搜救系统,通过在无人机4上安装有北斗定位系统,并通过岸边设置的指挥端7接收无人机4落水位置的经纬度信息,同时指挥端7收集无人机4落水位置附近5-10海里范围的AIS船舶终端8的经纬度信息,并将无人机4的经纬度信息发送给距离最近的AIS船舶终端8进行搜救和打捞作业,便于无人机4在完成海上作业后回收打捞,且就近选择AIS船舶终端8进行打捞,降低打捞成本的同时,避免多只AIS船舶终端8进行搜救时存在碰撞风险,搜救过程安全可靠,便于普及和推广。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种自浮式海上无人机及其落水搜救系统
- 一种自浮式海上无人机及其落水搜救系统