一种具有报警功能的无人机及其使用方法
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及无人机技术领域,具体为一种具有报警功能的无人机及其使用方法。
背景技术
无人机是无人驾驶飞机的简称,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,无人机是一种不需要人驾驶的远程操控机器,由于它的体积小,速度快,反应灵敏,因此常用于探测、航拍等领域,随着社会的进步,经济的发展,人们生活水平越来越高,人们的娱乐生活也越发多样化,无人驾驶飞机越来越被各种爱好人士运用在平时的日常生活中。
无人驾驶飞机行业的越来越收到人们的追捧,这对无人机的要求也就越来越高,现有技术的无人机着陆暴露了一个很严重的问题,就是当无人机内部的蓄电池电量过低时,无人机没有自动报警机构,导致无人机在使用过程中可能会由于使用时间过长,导致蓄电池断电,使无人机从高空坠落,影响无人机的使用寿命。
发明内容
本发明的目的在于提供一种具有报警功能的无人机及其使用方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种具有报警功能的无人机,包括螺旋片、支撑杆、报警装置、保护装置及支腿,所述螺旋片的下端固定连接有支撑杆,且支撑杆的另一端固定连接有报警装置,所述报警装置包含外部壳体、报警灯、备用电池、蓄电池及控制器,且外部壳体的外部固定连接有支撑杆,所述外部壳体的上端固定连接有报警灯,且外部壳体的上端内部左侧固定连接有备用电池,所述备用电池的左侧设有呈上下设置的接触器,且接触器的前后两端固定连接有外部壳体,所述接触器的内部设有接触板,且接触板的另一端固定连接有衔铁,所述衔铁的右端上下两侧均固定连接有导杆,且导杆的外部滑动连接有固定板,所述固定板的一端固定连接有外部壳体,且固定板的另一端固定连接有电磁铁,所述电磁铁的下端右侧设有控制器,且控制器的下端固定连接有外部壳体,所述控制器的上侧设有蓄电池,且蓄电池的上端固定连接有外部壳体,所述外部壳体的下端左右两侧均固定连接有支腿。
优选的,所述导杆的外部设有弹簧,且弹簧的左右两端分别固定连接有衔铁及固定板。
优选的,所述外部壳体的下端转动连接有保护装置,且保护装置包含第一电机、蜗轮、蜗杆、传动轴、齿柱、摄像主体及呈左右对称设置的开合板,所述开合板的上端均转动连接有外部壳体,且开合板的一侧转动连接有电磁推杆,所述电磁推杆的另一端转动连接有外部壳体,所述开合板的上侧设有摄像主体,且摄像主体的上端固定连接有齿柱,所述齿柱的内部滑动连接有传动轴,且传动轴的外部固定连接有蜗轮,所述传动轴的上端转动连接有外部壳体,且蜗轮的一侧啮合连接有蜗杆,所述蜗杆的后端固定连接有第一电机的输出轴,且第一电机的后端固定连接有外部壳体。
优选的,所述齿柱的左侧啮合连接有限位齿轮,且限位齿轮的前后两端均转动连接有外部壳体,所述齿柱的右侧啮合连接有主动齿轮,且主动齿轮的内部固定连接有第二电机的输出轴,所述第二电机的后端固定连接有外部壳体。
优选的,所述限位齿轮的形状为伞齿轮,且齿柱外部开设有齿槽,所述限位齿轮及主动齿轮通过齿槽与齿柱啮合连接。
优选的,所述使用方法如下:
步骤一:通过启动蓄电池对电磁铁内部通电,从而带动接触板与接触器分离,从而实现无人机内部正常工作,当蓄电池内部电量过低时,电磁铁断电,通过设置的弹簧带动衔铁移动,从而使接触板与接触器贴合,从而实现对备用电池对报警灯的通电,实现低电量报警功能;
步骤二:通过电磁推杆带动开合板移动,再通过设置的第二电机带动主动齿轮旋转,从而带动齿轮的上下移动,再通过设置的限位齿轮,对齿柱的移动距离限位,防止在使用过程中,摄像主体的发生掉落的危险;
步骤三:通过设置的第一电机带动蜗杆旋转,从而带动蜗轮旋转,带动传动轴旋转,从而给带动摄像主体旋转,从而实现摄像主体的旋转拍摄;
步骤四:将摄像主体收回,然后启动电磁推杆将开合板关闭,实现对摄像主体在不使用时的保护。
与现有技术相比,本发明的有益效果是:
1、本发明中,通过启动蓄电池对电磁铁内部通电,从而带动接触板与接触器分离,从而实现无人机内部正常工作,当蓄电池内部电量过低时,电磁铁断电,通过设置的弹簧带动衔铁移动,从而使接触板与接触器贴合,从而实现对备用电池对报警灯的通电,实现低电量报警功能,防止在无人机飞行时,蓄电池内部没有电量,而使用者无法收到信息,导致无人机的损坏;
2、本发明中,通过电磁推杆带动开合板移动,再通过设置的第二电机带动主动齿轮旋转,从而带动齿轮的上下移动,再通过设置的限位齿轮,对齿柱的移动距离限位,防止在使用过程中,摄像主体的发生掉落的危险,通过设置的第一电机带动蜗杆旋转,从而带动蜗轮旋转,带动传动轴旋转,从而给带动摄像主体旋转,从而实现摄像主体的旋转拍摄,实现对摄像主体的旋转同时,带动摄像主体的收纳,从而实现对摄像主体的保护,防止在不使用时摄像主体的损坏,造成经济损失。
附图说明
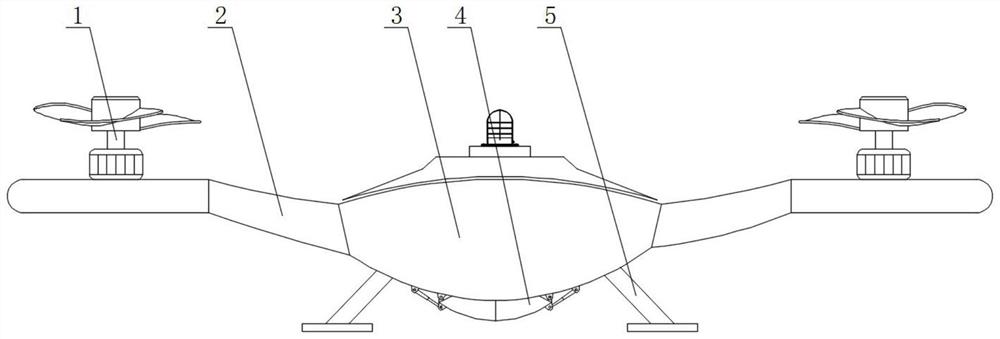
图1为本发明的整体结构示意图;
图2为本发明外部壳体的内部结构示意图;
图3为本发明齿柱的内部结构示意图;
图4为本发明蜗杆的安装结构示意图;
图5为本发明主动齿轮的安装结构示意图;
图6为本发明图2中的A处结构示意图;
图7为本发明十字滑槽的安装结构示意图。
图中:1-螺旋片、2-支撑杆、3-报警装置、301-备用电池、302-接触器、303-报警灯、304-外部壳体、305-蓄电池、306-控制器、307-接触板、308-衔铁、309-弹簧、310-固定板、311-导杆、312-电磁铁、4-保护装置、401-电磁推杆、402-主动齿轮、403-摄像主体、404-限位齿轮、405-开合板、406-蜗轮、407-蜗杆、408-传动轴、409-十字滑块、410-齿柱、411-第一电机、412-十字滑槽、413-第二电机、5-支腿。
具体实施方式
实施例1:
请参阅图1-7,本发明提供一种技术方案:
一种具有报警功能的无人机,包括螺旋片1、支撑杆2、报警装置3、保护装置4及支腿5,螺旋片1的下端固定连接有支撑杆2,且支撑杆2的另一端固定连接有报警装置3,报警装置3包含外部壳体304、报警灯303、备用电池301、蓄电池305及控制器306,且外部壳体304的外部固定连接有支撑杆2,外部壳体304的上端固定连接有报警灯303,且外部壳体304的上端内部左侧固定连接有备用电池301,备用电池301的左侧设有呈上下设置的接触器302,且接触器302的前后两端固定连接有外部壳体304,接触器302的内部设有接触板307,且接触板307的另一端固定连接有衔铁308,衔铁308的右端上下两侧均固定连接有导杆311,且导杆311的外部滑动连接有固定板310,固定板310的一端固定连接有外部壳体304,且固定板310的另一端固定连接有电磁铁312,电磁铁312的下端右侧设有控制器306,且控制器306的下端固定连接有外部壳体304,控制器306的上侧设有蓄电池305,且蓄电池305的上端固定连接有外部壳体304,外部壳体304的下端左右两侧均固定连接有支腿5,这种设置可以对蓄电池305的电量监控,通过设置的备用电池301对报警灯303的启动,防止蓄电池305电量过低时,使用者无法收到信心,造成无人机的损坏;导杆311的外部设有弹簧309,且弹簧309的左右两端分别固定连接有衔铁308及固定板310,通过设置的弹簧309,便于将衔铁308弹出,从而使接触板307与接触器302接触,从而启动报警灯303进行低电量报警;外部壳体304的下端转动连接有保护装置4,且保护装置4包含第一电机411、蜗轮406、蜗杆407、传动轴408、齿柱410、摄像主体403及呈左右对称设置的开合板405,开合板405的上端均转动连接有外部壳体304,且开合板405的一侧转动连接有电磁推杆401,电磁推杆401的另一端转动连接有外部壳体304,开合板405的上侧设有摄像主体403,且摄像主体403的上端固定连接有齿柱410,齿柱410的内部滑动连接有传动轴408,且传动轴408的外部固定连接有蜗轮406,传动轴408的上端转动连接有外部壳体304,且蜗轮406的一侧啮合连接有蜗杆407,蜗杆407的后端固定连接有第一电机411的输出轴,且第一电机411的后端固定连接有外部壳体304,通过设置的电磁推杆401带动开合板405的转动,从而实现对摄像主体403的保护,防止在不使用时,造成摄像主体403的损坏,影响使用寿命;齿柱410的左侧啮合连接有限位齿轮404,且限位齿轮404的前后两端均转动连接有外部壳体304,齿柱410的右侧啮合连接有主动齿轮402,且主动齿轮402的内部固定连接有第二电机413的输出轴,第二电机413的后端固定连接有外部壳体304,通过设置的第二电机413带动主动齿轮402的旋转,从而带动齿柱410的上下移动,从而实现对摄像主体403的保护;传动轴408的外部设有十字滑块409,且齿柱410的内部开设有十字滑槽412,传动轴408通过设置的十字滑块409与十字滑槽412的滑动连接和齿柱410滑动连接,通过设置的十字滑块409与十字滑槽412的相互连接,便于齿柱410与传动轴408在相互滑动的同时,可以在第一电机411的带动下,带动摄像主体403旋转,从而实现收纳的同时,便于带动摄像主体403的旋转;限位齿轮404的形状为伞齿轮,且齿柱410外部开设有齿槽,限位齿轮404及主动齿轮402通过齿槽与齿柱410啮合连接,通过设置的齿槽,便于主动齿轮402带动齿柱410的移动。
使用方法如下:
步骤一:通过启动蓄电池305对电磁铁312内部通电,从而带动接触板307与接触器302分离,从而实现无人机内部正常工作,当蓄电池305内部电量过低时,电磁铁312断电,通过设置的弹簧309带动衔铁308移动,从而使接触板307与接触器302贴合,从而实现对备用电池301对报警灯303的通电,实现低电量报警功能;
步骤二:通过电磁推杆401带动开合板405移动,再通过设置的第二电机413带动主动齿轮402旋转,从而带动齿轮410的上下移动,再通过设置的限位齿轮404,对齿柱410的移动距离限位,防止在使用过程中,摄像主体403的发生掉落的危险;
步骤三:通过设置的第一电机411带动蜗杆407旋转,从而带动蜗轮406旋转,带动传动轴408旋转,从而给带动摄像主体403旋转,从而实现摄像主体403的旋转拍摄;
步骤四:将摄像主体403收回,然后启动电磁推杆401将开合板405关闭,实现对摄像主体403在不使用时的保护。
工作流程:启动蓄电池305,通过设置的控制器306启动螺旋片1,从而带动无人机的飞行,通过启动蓄电池305,从而实现对电磁铁312内部通电,从而带动接触板307与接触器302分离,从而实现无人机内部正常工作,当蓄电池305内部电量过低时,电磁铁312断电,通过设置的弹簧309带动衔铁308移动,从而使接触板307与接触器302贴合,从而实现对备用电池301对报警灯303的通电,实现低电量报警功能,当需要拍摄时,通过电磁推杆401带动开合板405移动,从而将开合板405打开,再通过设置的第二电机413带动主动齿轮402旋转,从而带动齿轮410的上下移动,从而将摄影主体403移出,再通过设置的限位齿轮404,对齿柱410的移动距离限位,防止在使用过程中,摄像主体403的发生掉落的危险,通过设置的第一电机411带动蜗杆407旋转,从而带动蜗轮406旋转,带动传动轴408旋转,从而给带动摄像主体403旋转,从而实现摄像主体403的旋转拍摄,拍摄结束后,通过设置的第二电机413带动主动齿轮402旋转,从而将摄像主体403收回,然后启动电磁推杆401将开合板405关闭,实现对摄像主体403在不使用时的保护,将无人机收回后,关闭蓄电池305即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本发明的方法及其核心思想。以上所述仅是本发明的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将发明的构思和技术方案直接应用于其它场合的,均应视为本发明的保护范围。
- 一种具有报警功能的无人机及其使用方法
- 一种用于电网检修具有声光报警功能的无人机