一种具有气动外形受损后防坠毁功能的飞行器
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及飞行器技术领域,更具体地涉及一种具有气动外形受损后防坠毁功能的飞行器。
背景技术
随着无人飞行载具集成化和小型化的发展趋势,微型飞行器逐渐凸显出其性能优势,成为远程巡航、情报获取、高空航拍、监测搜救等众多应用的重要工具。围绕微型飞行器的相关研究主要包括结构设计、气动性能、自主控制、智能导航、先进材料等。其中,独特的结构设计以及自主飞行控制策略成为提高飞行器飞行稳定性能的重要方法和有效手段。
目前,当飞行器气动外形受损后,飞行器就会失去控制,遥控器再也无法控制飞行器,飞行器往往会坠落导致损坏,甚至报废。因此,有必要提供一种具有气动外形受损后防坠毁功能的飞行器,以克服上述问题。
发明内容
本发明提供了一种具有气动外形受损后防坠毁功能的飞行器,以解决目前,当飞行器气动外形受损后,飞行器就会失去控制,遥控器再也无法控制飞行器,飞行器往往会坠落导致损坏,甚至报废的问题。
为解决上述技术问题,本发明所采用的技术方案是:一种具有气动外形受损后防坠毁功能的飞行器,包括遥控器、机身和机翼,机身表面和机翼表面均设置有压力传感器,机身内安装有控制中心系统、动力控制系统和辅助控制系统,控制中心系统与遥控器无线连接,控制中心系统分别与压力传感器、动力控制系统和辅助控制系统连接;
动力控制系统包括涵道螺旋桨和与涵道螺旋桨配套使用的驱动电机,机翼一端与机身连接,另一端与涵道螺旋桨连接;辅助控制系统包括侧舱门和设置在侧舱门后的辅助飞行装置,机身和机翼均设置有侧舱门,辅助飞行装置为滑翔伞;压力传感器用于检测飞行器的表面气流压力;
压力传感器将检测到的飞行器表面气流压力数据传输到控制中心系统;控制中心系统用于根据飞行器表面气流压力数据以及遥控器发出的控制信号,发送工作信号到动力控制系统和辅助控制系统;辅助控制系统用于接收工作信号控制侧舱门打开,滑翔伞伸出,滑翔伞、机身和机翼形成滑翔结构;动力控制系统用于接收工作信号控制涵道螺旋桨的转速和方向,配合滑翔伞使得飞行器在空中滑翔或向地面滑翔降落。
进一步地,飞行器为四轴飞行器,机身呈圆环状且圆环中空位置安装有涵道螺旋桨。
进一步地,机翼沿机身的四个圆周四等分的方向向外安装。
进一步地,机翼左右两侧均设置有侧舱门。
进一步地,位于相邻机翼之间的机身部分设置有侧舱门。
进一步地,辅助飞行装置包括弧形导轨和驱动弧形导轨的导轨电机,弧形导轨设置在侧舱门后。
进一步地,弧形导轨有四组,每组弧形导轨包括收纳舱、弧形第一导轨和弧形第二导轨,弧形第一导轨一端从位于相邻机翼之间的机身部分延伸至相邻机翼中的其中一个机翼,另一端与收纳舱连接,弧形第二导轨一端从位于相邻机翼之间的机身部分延伸至相邻机翼中的另一个机翼,另一端与收纳舱远离与弧形第一导轨连接处的一端连接。
进一步地,收纳舱收纳有滑翔伞,弧形第一导轨设置有第一滑块,弧形第二导轨设置有第二滑块,第一滑块和第二滑块分别与滑翔伞的两端连接。
进一步地,弧形第一导轨设置有沿弧形第一导轨延伸的伞骨架,弧形第二导轨设置有沿弧形第二导轨延伸的伞骨架,滑翔伞套设在伞骨架。
进一步地,收纳舱设置有开口,开口从滑翔伞与第一滑块连接的一端延伸至滑翔伞与第二滑块连接的一端,且开口朝向侧舱门。
与现有技术相比,本发明具有以下有益效果:本发明的具有气动外形受损后防坠毁功能的飞行器通过压力传感器将检测到的飞行器表面气流压力数据传输到控制中心系统,控制中心系统发送工作信号到动力控制系统和辅助控制系统,辅助控制系统控制滑翔伞伸出,动力控制系统配合滑翔伞进行空中滑翔或滑翔降落,使得飞行器在气动外形受损后,能够重新在控制下飞行,或者在完全不能控制,甚至飞行器失电后,飞行器也能在滑翔伞的辅助下进行空中滑翔或滑翔降落,避免飞行器坠落导致损坏,甚至报废。
附图说明
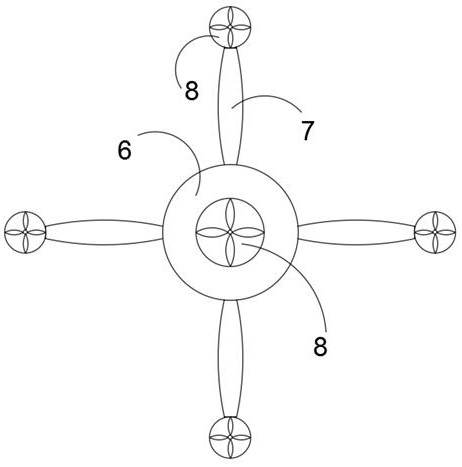
图1为本发明的一种具有气动外形受损后防坠毁功能的飞行器的结构示意图。
图2为本发明的一种具有气动外形受损后防坠毁功能的飞行器的原理示意图。
图3为本发明的飞行器在滑翔伞展开后的结构示意图。
图4为本发明的飞行器的侧舱门的分布示意图。
图5为本发明的飞行器的侧舱门的结构示意图。
图6为本发明的飞行器的弧形导轨在滑翔伞未展开时的结构示意图。
图7为本发明的飞行器的弧形导轨在滑翔伞展开后的结构示意图。
图8为本发明的飞行器的旋转电机与涵道螺旋桨的连接示意图。
图9为本发明的飞行器的四组弧形导轨的分布示意图。
附图标记:1为控制中心系统,2为动力控制系统,3为辅助控制系统,4为遥控器,5为蓄电池,6为机身,7为机翼,8为涵道螺旋桨,9为侧舱门,10为弧形导轨,11为弧形第一导轨,12为弧形第二导轨,13为第一滑块,14为第二滑块,15为收纳舱,16为滑翔伞,17为伞骨架,18为上固定舱门,19为上动作舱门,20为下固定舱门,21为下动作舱门,22为限位装置,23为上行程开关,24为下行程开关,25为直线导轨,26为旋转电机,27为传动轴。
具体实施方式
下面结合附图进一步详细描述本发明的技术方案,但本发明的保护范围不局限于以下所述。
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。
下面结合实施例对本发明作进一步的描述,所描述的实施例仅仅是本发明一部分实施例,并不是全部的实施例。
请参阅图1至图9,图中所示者为本发明所选用的实施例结构,此仅供说明之用,在专利申请上并不受此种结构的限制。
实施例一
如图1、图2、图3和图4所示,一种具有气动外形受损后防坠毁功能的飞行器,包括:飞行器包括遥控器4、机身6和机翼7,机身6表面和机翼7表面均设置有压力传感器,机身6内安装有控制中心系统1、动力控制系统2和辅助控制系统3,控制中心系统1与遥控器4无线连接,控制中心系统1分别与压力传感器、动力控制系统2和辅助控制系统3连接;
动力控制系统2包括涵道螺旋桨8和与涵道螺旋桨8配套使用的驱动电机,机翼7一端与机身6连接,另一端与涵道螺旋桨8连接;辅助控制系统3包括侧舱门9和设置在侧舱门9后的辅助飞行装置,机身6和机翼7均设置有侧舱门9,辅助飞行装置包括滑翔伞16;压力传感器用于检测飞行器的表面气流压力;
压力传感器将检测到的飞行器表面气流压力数据传输到控制中心系统1;
控制中心系统1根据飞行器表面气流压力数据以及遥控器4发出的控制信号,发送工作信号到动力控制系统2和辅助控制系统3;
辅助控制系统3接收工作信号控制侧舱门9打开,滑翔伞16伸出,滑翔伞16、机身6和机翼7形成滑翔结构;
动力控制系统2接收工作信号控制涵道螺旋桨8的转速和方向,配合滑翔伞16在空中滑翔或向地面滑翔降落。
飞行器为四轴飞行器,机身6呈圆环状且圆环中空位置安装有涵道螺旋桨8。
机翼7沿机身6的四个圆周四等分的方向向外安装。
机翼7左右两侧均设置有侧舱门9。
位于相邻机翼7之间的机身6部分设置有侧舱门9。
辅助飞行装置包括弧形导轨10和驱动弧形导轨10的导轨电机,弧形导轨10设置在侧舱门9后。
弧形导轨10有四组,如图6、图7和图9所示,每组弧形导轨10包括收纳舱15、弧形第一导轨11和弧形第二导轨12,弧形第一导轨11一端从位于相邻机翼7之间的机身6部分延伸至相邻机翼7中的其中一个机翼7,另一端与收纳舱15连接,弧形第二导轨12一端从位于相邻机翼7之间的机身6部分延伸至相邻机翼7中的另一个机翼7,另一端与收纳舱15远离与弧形第一导轨11连接处的一端连接。即收纳舱15的两端分别与弧形第一导轨11和弧形第二导轨12连接。即收纳舱15、弧形第一导轨11的一部分和弧形第二导轨12的一部分均位于机身6内,弧形第一导轨11的另一部分和弧形第二导轨12的另一部分分别位于属于相邻的两个机翼7内,也即每个机翼7内均有相邻两组弧形导轨10的部分导轨。也说明了机翼7的内部与机身6的内部是连通的。也即四个收纳舱15在机身6内分别位于圆周四等分的位置上,也即四个收纳舱15呈十字型分布。在实际中,弧形第一导轨11和弧形第二导轨12均可采用普通的弧形导轨和直线导轨拼接组成。
如图6和图7所示,收纳舱15收纳有滑翔伞16,弧形第一导轨11设置有第一滑块13,弧形第二导轨12设置有第二滑块14,第一滑块13和第二滑块14分别与滑翔伞16的两端连接。
如图6和图7所示,弧形第一导轨11设置有从弧形第一导轨11与收纳舱15连接的一端开始沿弧形第一导轨11延伸的伞骨架17,弧形第二导轨12设置有从弧形第二导轨12与收纳舱15连接的一端开始沿弧形第二导轨12延伸的伞骨架17,滑翔伞16套设在伞骨架17。
收纳舱15设置有开口,开口从滑翔伞16与第一滑块13连接的一端延伸至滑翔伞16与第二滑块14连接的一端,且开口朝向侧舱门9。
实施例二
实施例二为实施例一的进一步优化。
如图2所示,机身6内还安装有蓄电池5,蓄电池5分别与控制中心系统1、动力控制系统2和辅助控制系统3连接。蓄电池5为飞行器提供电源。
如图5所示,侧舱门9包括上固定舱门18、上动作舱门19、下固定舱门20、下动作舱门21和限位装置22,上固定舱门18一端与机身6固定连接,另一端与上动作舱门19活动连接,下固定舱门20一端与机身6远离上固定舱门18的一端固定连接,另一端与下动作舱门21活动连接,上动作舱门19远离上固定舱门18的一端与下动作舱门21远离下固定舱门20的一端相配合,上动作舱门19与下动作舱门21相配合的一端均为锯齿状,且锯齿状的两端相互契合,上动作舱门19在锯齿状的一端向内延伸出凸台,下动作舱门21在锯齿状的一端向外延伸出凸台,凸台覆盖住上动作舱门19与下动作舱门21相配合后的缝隙,凸台面向锯齿状的侧面设置有密封垫。
如图5所示,上固定舱门18靠近机身6处设置有限位装置22,下固定舱门20靠近机身6处设置有限位装置22,限位装置22设置有行程开关,行程开关与控制中心系统1连接,行程开关包括上行程开关23和下行程开关24,上行程开关23的动触头朝向上动作舱门19,下行程开关24的动触头朝向下动作舱门21。
如图5所示,上固定舱门18内侧和下固定舱门20内侧均设置有直线导轨25和驱动直线导轨25的直线电机,上动作舱门19靠近上固定舱门18内侧的一端与直线导轨25的滑块连接,下动作舱门21靠近下固定舱门20内侧的一端与直线导轨25的滑块连接,即上固定舱门18通过直线导轨25与上动作舱门19活动连接,下固定舱门20通过直线导轨25与下动作舱门21活动连接。
滑翔伞16由特种尼龙纺织制成,布料表面设置有两层涂层,分别为抗撕裂涂层和抗老化涂层。
实施例三
实施例三为实施例二的进一步优化。
驱动电机与涵道螺旋桨8连接。
控制中心系统1通过无线数据传输的方式与遥控器4连接,接收遥控端发出的控制信号,控制中心系统1通过数据线与动力控制系统2连接,发出飞行指令至驱动电机,进而控制涵道螺旋桨8的旋转方向和旋转速度,实现不同的指定飞行姿态。
控制中心系统1通过数据线与辅助控制系统3连接,将压力传感器检测到的表面气流数据,作为闭环反馈信号与遥控器4发出的控制信号进行解算,发送解算结果到辅助控制系统3,从而通过辅助控制系统3控制滑翔伞16伸出进行滑翔。压力传感器为MEMS微型压力传感器阵列。本发明中,解算结果相当于一个命令信号,如本发明中所说的工作信号。
其中,解算的过程为本领域技术人员所公知,本发明实施例对此不做赘述。
如图8所示,动力控制系统2还包括旋转电机26,旋转电机26通过传动轴27与涵道螺旋桨8的外壳体连接,即可通过旋转电机26控制涵道螺旋桨8的外壳体旋转。
实施例四
实施例四为实施例三的进一步优化。
本发明的一种具有气动外形受损后防坠毁功能的飞行器的具体如下:
当飞行器在飞行时,气动外形受损,压力传感器将检测到的飞行器表面气流压力数据传输到控制中心系统1;
控制中心系统1将压力传感器检测到的表面气流数据,作为闭环反馈信号与遥控器4发出的控制信号进行解算,发送解算结果到辅助控制系统3;其中,本领域技术人员可知飞行器气动外形受损后,飞行器的表面气流必然会发生较大变化,即可从发生较大变化的表面气流数据中得出飞行器气动外形受损;或者遥控器4的操控者明显观察到飞行器气动外形受损,也可通过遥控器4向辅助控制系统3发出工作信号;而且如果飞行器气动外形受损不大,那么就算表面气流数据发生较大变化,也即飞行器也会很有可能即将失去控制,那么也需要辅助控制系统3进行辅助飞行,即不管飞行器气动外形受损程度大或者小,一旦表面气流数据发生较大变化,就需要辅助控制系统3进行辅助飞行;如果飞行器气动外形受损不大,表面气流数据变化较小,即飞行器还在控制当中,也就不需要辅助控制系统3;本发明的好处也在于就算辅助控制系统3误动作,滑翔伞16伸出后,飞行器也能继续正常飞行,不影响飞行器任务的执行或正常工作;
辅助控制系统3接收工作信号或解算结果并控制侧舱门9打开,滑翔伞16伸出,滑翔伞16、机身6和机翼7形成滑翔结构;侧舱门9打开和滑翔伞16伸出的过程如下:
工作信号或解算结果传输到直线电机,直线电机驱动直线导轨25工作,上固定舱门18的直线导轨25的滑块带动上动作舱门19向上移动,下固定舱门20的直线导轨25的滑块带动下动作舱门21向下移动,直到上动作舱门19压住上行程开关23的动触头,下动作舱门21压住下行程开关24的动触头,即侧舱门9完全打开,上行程开关23和下行程开关24闭合后将信号传输到控制中心系统1,控制中心系统1再次发出工作信号并发送到导轨电机,导轨电机驱动弧形导轨10工作,弧形第一导轨11的第一滑块13带动滑翔伞16的一端向机翼7移动,弧形第二导轨12的第二滑块14带动滑翔伞16的另一端向机翼7移动,滑翔伞16从收纳舱15的开口被拉出并在第一滑块13和第二滑块14的带动下沿着伞骨架17向外伸出,即滑翔伞16在相邻机翼7之间展开,即滑翔伞16有四个,四个滑翔伞16、机身6和四个机翼7形成滑翔结构;
动力控制系统2接收工作信号控制涵道螺旋桨8的转速和方向,配合滑翔伞16在空中滑翔或向地面滑翔降落;其中,通过旋转电机26控制涵道螺旋桨8的外壳体旋转,即可调整飞行器的滑翔方向。即便飞行器失电后,空气通过涵道螺旋桨8后也能形成气流,通过旋转涵道螺旋桨8的外壳体,改变气流方向,也能对飞行器的滑翔方向进行调整。
以上所述实施例是用以说明本发明,并非用以限制本发明,所以举例数值的变更或等效元件的置换仍应隶属本发明的范畴。
由以上详细说明,可使本领域普通技术人员明了本发明的确可达成前述目的,实已符合专利法的规定。
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,应当指出的是,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种具有气动外形受损后防坠毁功能的飞行器
- 一种具有气动外形受损后防坠毁功能的飞行器