一种用于建筑外墙巡检的重载爬墙机器人及系统
文献发布时间:2023-06-19 10:25:58
技术领域
本申请涉及机器人技术领域,尤其涉及一种用于建筑外墙巡检的重载爬墙机器人及系统。
背景技术
近年来,随着我国社会经济的快速发展和城镇化进程的不断加速,各类建筑保有量大幅度提升。自上世纪90年代以来,伴随建筑节能技术发展,建筑外墙外保温成为建筑节能的主要措施,以各类保温板材粘锚薄抹灰体系、保温砂浆薄抹灰体系为主。由于不同建设时期材料质量因素、施工因素以及服役期间老化等多种因素的综合作用下,有些建筑的外墙外保温层已出现了不同程度的裂缝、空鼓、粘结力不足等问题,特别是在极端风雨气候条件下,发生了脱落、坠落问题,出现了多起外墙外保温层、瓷砖脱落砸伤行人及损坏财物等现象。
目前建筑物的高度较高,如果采用人工手持设备进行检测,高空作业危险性较高,且检测效率低,采用机器人代替人工,可以解决高空作业危险的问题,但是机器人需要搭载检测设备,检测设备具有一定的重量,目前市面上的机器人载重能力较低,不能够满足检测需求。
发明内容
本发明提供了一种用于建筑外墙巡检的重载爬墙机器人及系统,能够提高载重能力,满足检测需求。
一种用于建筑外墙巡检的重载爬墙机器人,包括第一主体架、第二主体架、横向连接架、风扇组件、动力装置、滑轮组件、飞控处理器、总控制器以及无线通信模块;
所述第一主体架和第二主体架通过所述横向连接架配合连接;所述风扇组件与所述第一主体架、第二主体架以及横向连接架配合连接,所述风扇组件用于为机器人提供反向于重力的推力以及面向墙体的压力;所述动力装置与所述风扇组件配合连接,用于为风扇组件提供动力;所述飞控处理器与所述动力装置连接,用于控制动力装置调整机器人飞行姿态,所述总控制器与所述无线通信模块以及飞控处理器连接,所述无线通信模块用于与地面控制站建立通信连接;所述滑轮组件设置于所述第一主体架和第二主体架上,巡检时滑轮组件贴合墙体。
进一步地,所述横向连接架包括第一横向连接架、第二横向连接架、第三横向连接架以及第四横向连接架;
所述第一横向连接架、第二横向连接架、第三横向连接架以及第四横向连接架的一端与所述第一主体架连接,另一端与所述第二主体架连接,所述第一横向连接架和第二横向连接架用于挂载检测设备。
进一步地,所述机器人还包括与所述总控制器连接的水平检测装置,用于采集机器人水平方向角度信息并发送至所述总控制器;
所述水平检测装置设置于所述第一横向连接架或者第二横向连接架上。
进一步地,所述风扇组件包括第一风扇、第二风扇、第三风扇以及第四风扇,所述第一风扇和第二风扇分别与所述第一主体架和第二主体架连接,用于提供面向墙体的压力,所述第三风扇与所述第三横向连接架以及第四横向连接架连接,用于提供反向于重力的推力;所述第四风扇与所述第二横向连接架连接,用于提供反向于重力的推力以及面向墙体的压力;
所述动力装置包括第一电机、第二电机、第三电机以及第四电机,所述第一电机、第二电机、第三电机以及第四电机分别与所述第一风扇、第二风扇、第三风扇以及第四风扇配合连接,所述第一电机、第二电机、第三电机以及第四电机均与所述飞控处理器连接。
进一步地,所述第四风扇与其投影面的夹角为0°-90°。
进一步地,所述机器人还设置有与所述第四风扇配合的舵机,用于调整所述第四风扇与其投影面的角度;
所述机器人还包括压力传感器,所述压力传感器以及所述舵机与所述总控制器连接,所述压力传感器用于采集所述机器人与墙面的压力信息并发送至所述总控制器,所述总控制器根据所述压力信息控制所述舵机调整所述第四风扇的角度。
进一步地,所述滑轮组件包括第一滑轮、第二滑轮、第三滑轮以及第四滑轮,所述第一滑轮和第二滑轮分别设置于所述第一主体架两端,所述第三滑轮和第四滑轮分别设置于所述第二主体架两端。
进一步地,所述机器人还包括转向机构和转向驱动装置,所述转向机构与所述滑轮组件配合连接,所述转向驱动装置与所述转向机构配合连接,用于为所述转向机构提供转向驱动力,所述转向驱动装置与所述总控制器连接。
进一步地,所述转向机构包括第一转向机构、第二转向机构、第三转向机构和第四转向机构,所述第一转向机构、第二转向机构、第三转向机构和第四转向机构分别与所述第一滑轮、第二滑轮、第三滑轮以及第四滑轮配合连接;所述转向驱动装置包括第一转向电机、第二转向电机、第三转向电机以及第四转向电机;所述第一转向电机、第二转向电机、第三转向电机以及第四转向电机均与所述总控制器连接。
一种机器人系统,包括上述的用于建筑外墙巡检的重载爬墙机器人,还包括地面控制站,所述地面控制站与所述无线通信模块通信连接。
本发明提供的用于建筑外墙巡检的重载爬墙机器人及系统,至少包括如下有益效果:
(1)主体架和横向连接架的结构,使得机器人整体质量较轻,结合风扇组件提供动力,使得机器人的载重能力获得较大的提升,可搭载多种墙体检测设备,满足墙面检测的需求;
(2)区别于传统机器人,采用风扇为机器人提供反向于重力的推力以及面向墙体的压力,使得机器人可以平稳地贴合被检墙面飞行,保持重心平衡;实现独自爬墙功能,无需外部干预,可直接由地面攀岩到墙面;
(3)风扇组件中各个风扇的布局,能够保证整体力的平衡,还可通过调节风扇的角度,调节面向墙面的压力和推力,保证机器人的平稳飞行;
(4)通过水平检测装置,进而调整机器人的飞行姿态,使得机器人飞行过程中保持平衡,保证检测设备扫描数据的准确性;
(5)通过设置转向机构,能够实现机器人在不旋转机身的情况下,从竖直方向飞行到水平方向飞行的平稳过渡,保持检测设备姿态的均衡性;
(6)轻质的铝材结构,不仅能够增强机身刚度,还能有效减小机身质量,可以大负载作业。
附图说明
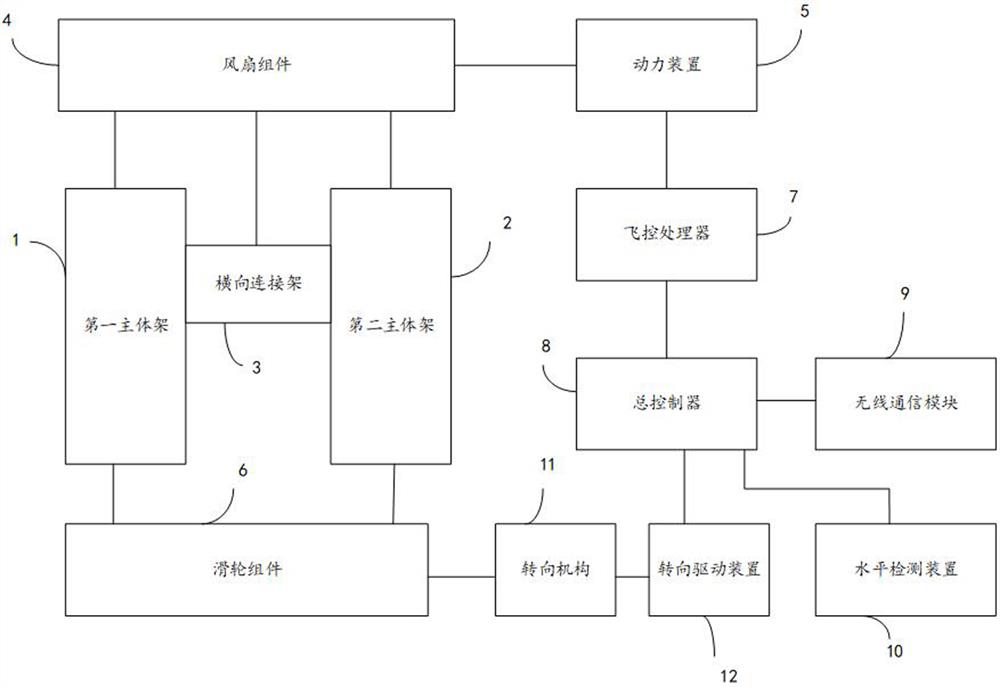
图1为本发明提供的用于建筑外墙巡检的重载爬墙机器人一种实施例的结构框图。
图2为本发明提供的用于建筑外墙巡检的重载爬墙机器人一种实施例的结构示意图。
图3为本发明提供的用于建筑外墙巡检的重载爬墙机器人中第四风扇调节原理示意图。
图4为本发明提供的用于建筑外墙巡检的重载爬墙机器人动力装置一种实施例的结构示意图。
图5为本发明提供的用于建筑外墙巡检的重载爬墙机器人转向机构一种实施例的结构示意图。
图6为本发明提供的用于建筑外墙巡检的重载爬墙机器人巡检轨迹一种实施例的示意图。
图7为本发明提供的机器人系统一种实施例的结构示意图。
具体实施方式
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
参考图1,在一些实施例中,提供一种用于建筑外墙巡检的重载爬墙机器人,包括第一主体架1、第二主体架2、横向连接架3、风扇组件4、动力装置5、滑轮组件6、飞控处理器7、总控制器8以及无线通信模块9;
第一主体架1和第二主体架2通过横向连接架3配合连接;风扇组件4与第一主体架1、第二主体架2以及横向连接架3配合连接,风扇组件4用于为机器人提供反向于重力的推力以及面向墙体的压力;动力装置5与风扇组件4配合连接,用于为风扇组件4提供动力;飞控处理器7与动力装置5连接,用于控制动力装置5调整机器人飞行姿态,总控制器8与无线通信模块9以及飞控处理器7连接,无线通信模块9用于与地面控制站建立通信连接;滑轮组件6设置于第一主体架1和第二主体架2上,巡检时滑轮组件6贴合墙体。
进一步地,参考图2,横向连接架3包括第一横向连接架31、第二横向连接架32、第三横向连接架33以及第四横向连接架34;
第一横向连接架31、第二横向连接架32、第三横向连接架33以及第四横向连接架34的一端与第一主体架1连接,另一端与第二主体架2连接,第一横向连接架31和第二连接架32用于挂载检测设备。
在一些实施例中,检测设备包括但不限于电磁雷达、敲击检测装置、声音采集装置、图像采集装置、喷涂装置、标记装置等。
在一些实施例中,第一主体架1、第二主体架2、第一横向连接架31、第二横向连接架32、第三横向连接架33和第四横向连接架34为空心结构,可将动力装置5、无线通信模块9以及飞控处理器7设置于第一主体架1和第二主体架2内,第一横向连接架31、第二横向连接架32、第三横向连接架33和第四横向连接架34内部可进行走线。
在一些实施例中,所述机器人还包括与总控制器8连接的水平检测装置10,用于采集机器人水平方向角度信息并发送至总控制器8;
水平检测装置10设置于第一横向连接架上31或者第二横向连接架32上。
具体地,水平检测装置10用于采集机器人水平方向角度信息并发送至总控制器8,总控制器8根据该水平方向角度信息,生成控制信号发送至飞控处理器7,飞控处理器7根据该控制信号,控制动力装置5,以控制机器人的飞行姿态,使得机器人飞行过程中保持平衡。
进一步地,风扇组件4包括第一风扇41、第二风扇42、第三风扇43以及第四风扇44,第一风扇41和第二风扇42分别与第一主体架1和第二主体架2连接,用于提供面向墙体的压力,第三风扇43与第三横向连接架33以及第四横向连接架34连接,用于提供反向于重力的推力;第四风扇44与第二横向连接架32连接,用于提供反向于重力的推力以及面向墙体的压力;
具体地,第一风扇41和第二风扇42用于提供面向墙体的压力,使得机器人可以贴合墙面,第一风扇41和第二风扇42的中轴线与被检墙面垂直,第三风扇43用于提供反向于重力的推力,使得机器人可以飞行,第三风扇43的中轴线与被检墙面平行,第四风扇44与其投影面的夹角为0°-90°,第四风扇44既提供反向于重力的推力,也提供面向墙体的压力,用于辅助第一风扇41、第二风扇42以及第三风扇43。
第一风扇、第二风扇、第三风扇和第四风扇的设置和配合,能够使机器人平稳地贴合被检墙面飞行,保持重心平衡,第一风扇、第二风扇提供面向墙体的压力,避免墙面不平出现打滑现象。
在一些实施例中,参考图3,机器人还设置有与第四风扇44配合的舵机400,用于调整第四风扇44与其投影面的角度;
机器人还包括压力传感器500,压力传感器500以及舵机400与总控制器8连接,压力传感器500用于采集所述机器人与墙面的压力信息并发送至总控制器8,总控制器8根据所述压力信息控制舵机400调整第四风扇44的角度。
当机器人与墙面的压力不足以使机器人贴合墙面时,通过舵机调整第四风扇44与其投影面的夹角,使得第四风扇向与墙面平行的方向调整,增大与墙面之间的压力,当机器人与墙面的压力大于预设值时,通过舵机调整第四风扇44与其投影面的夹角,使得第四风扇向与墙面垂直的方向调整,减小与墙面之间的压力,优选地,调节第四风扇44与其投影面的夹角为20°-70°。
参考图4,动力装置5包括第一电机51、第二电机52、第三电机53以及第四电机54,第一电机51、第二电机52、第三电机53以及第四电机54分别与第一风扇41、第二风扇42、第三风扇43以及第四风扇44配合连接,第一电机51、第二电机52、第三电机53以及第四电机54均与飞控处理器7连接。
第一电机51、第二电机52、第三电机53以及第四电机54分别为第一风扇41、第二风扇42、第三风扇43以及第四风扇44提供旋转的驱动力,飞控处理器7用于控制第一电机51、第二电机52、第三电机53以及第四电机54的转速和旋转方向,以控制机器人的飞行姿态。
进一步地,滑轮组件6包括第一滑轮61、第二滑轮62、第三滑轮63以及第四滑轮64,第一滑轮61和第二滑轮62分别设置于第一主体架1两端,第三滑轮63和第四滑轮64分别设置于第二主体架2两端。
机器人工作时,第一滑轮61、第二滑轮62、第三滑轮63以及第四滑轮64贴合被检墙面,使得机器人可以平稳的沿被检墙面飞行。
进一步地,参考图1,所述机器人还包括转向机构11和转向驱动装置12,转向机构11与滑轮组件6配合连接,转向驱动装置12与转向机构11配合连接,用于为转向机构11提供转向驱动力,转向驱动装置12与总控制器8连接。
参考图5,在一些实施例中,转向机构11包括第一转向机构111、第二转向机构112、第三转向机构113和第四转向机构114,第一转向机构111、第二转向机构112、第三转向机构113和第四转向机构114分别与第一滑轮61、第二滑轮62、第三滑轮63以及第四滑轮64配合连接;转向驱动装置12包括第一转向电机121、第二转向电机122、第三转向电机123以及第四转向电机124;第一转向电机121、第二转向电机122、第三转向电机123以及第四转向电机124均与总控制器8连接。
第一转向电机121、第二转向电机122、第三转向电机123以及第四转向电机124分别为第一转向机构111、第二转向机构112、第三转向机构113和第四转向机构114提供转向力,使得第一滑轮61、第二滑轮62、第三滑轮63以及第四滑轮64转向90°。
参考图6,在一些实施例中,机器人对被检墙面进行检测的轨迹如图6所示,在竖直方向上,机器人挂载的检测设备对墙面进行检测,到达拐角处时,第一转向电机121、第二转向电机122、第三转向电机123以及第四转向电机124分别为第一转向机构111、第二转向机构112、第三转向机构113和第四转向机构114提供转向力,使得第一滑轮61、第二滑轮62、第三滑轮63以及第四滑轮64转向90°进行平移,到达下一拐弯处时再通过各个转向电机控制各个滑轮转向90°,进入下一个垂直方向飞行,继续进行检测。
通过设置转向机构,能够实现机器人在不旋转机身的情况下,从竖直方向飞行到水平方向飞行的平稳过渡,保持检测设备姿态的均衡性。
在一些实施例中,第一主体架1、第二主体架2以及横向连接架3的材质为轻质材料,优选为铝材。轻质的铝材结构,不仅能够增强机身刚度,还能有效减小机身质量,可以大负载作业。
在一些实施例中,所述机器人可以通过搭载供电电池供电,提高使用的方便性,也可采用地面电源供电,使得机器人可以长时间工作。具体可以根据实际需要设计。
参考图7,在一些实施例中,还提供一种机器人系统,包括上述的建筑外墙爬墙巡检机器人100,还包括地面控制站200,地面控制站200与无线通信模块通信连接。
地面控制站200发送检测控制指令,机器人的无线通信模块接收该检测控制指令并发送至总控制器,总控制器根据该检测控制指令生成飞行控制信号发送至飞控处理器,飞控处理器根据该飞行控制信号控制动力装置,使得机器人按照预设的轨迹飞行,飞行过程中检测设备采集检测信号并发送至总控制器,再经无线通信模块发送至地面控制站。
综上,上述实施例提供的用于建筑外墙巡检的重载爬墙机器人及系统,至少包括如下有益效果:
(1)主体架和横向连接架的结构,使得机器人整体质量较轻,结合风扇组件提供动力,使得机器人的载重能力获得较大的提升,最大负载可达2KG,可搭载多种墙体检测设备,满足墙面检测的需求;
(2)区别于传统机器人,采用风扇为机器人提供反向于重力的推力以及面向墙体的压力,使得机器人可以平稳地贴合被检墙面飞行,保持重心平衡;实现独自爬墙功能,无需外部干预,可直接由地面攀岩到墙面;
(3)风扇组件中各个风扇的布局,能够保证整体力的平衡,还可通过调节风扇的角度,调节面向墙面的压力和推力,保证机器人的平稳飞行;
(4)通过水平检测装置,进而调整机器人的飞行姿态,使得机器人飞行过程中保持平衡,保证检测设备扫描数据的准确性;
(5)通过设置转向机构,能够实现机器人在不旋转机身的情况下,从竖直方向飞行到水平方向飞行的平稳过渡,保持检测设备姿态的均衡性;
(6)轻质的铝材结构,不仅能够增强机身刚度,还能有效减小机身质量,可以大负载作业。
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种用于建筑外墙巡检的重载爬墙机器人及系统
- 一种用于建筑外墙巡检的重载爬墙机器人及系统