交叉双旋翼无人直升机及其动力系统
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及直升机技术领域,特别是涉及一种交叉双旋翼无人直升机及其动力系统。
背景技术
现在的无人直升机多以单旋翼和共轴双旋翼为主,交叉双旋翼无人直升机相对较少。
现有的交叉双旋翼无人直升机的动力系统的结构较为复杂,在布置上占用空间大,不够紧凑,相应地,维护成本也高。
发明内容
本发明的目的是提供一种交叉双旋翼无人直升机及其动力系统,该动力系统的结构简单可靠,布置紧凑,能够节约空间,同时也能够降低维护成本。
为解决上述技术问题,本发明提供一种交叉双旋翼无人直升机的动力系统,包括动力源、两个旋翼轴和传动机构,所述动力源只设有一个,所述动力源与所述传动机构传动连接;所述传动机构具有两个动力输出端,第一动力输出端用于将来自所述动力源的动力传递至两个所述旋翼轴,第二动力输出端用于将来自所述动力源的动力传递至尾桨轴,所述第一动力输出端、所述第二动力输出端和所述尾桨轴处于同一轴线上。
该交叉双旋翼无人直升机的动力系统,只设有一个动力源,动力源的动力传递至传动机构,传动机构具有两个动力输出端,分别将动力传递至两个旋翼轴和尾桨轴,其中,两个动力输出端和尾桨轴处于同一轴线上,如此,一个动力源同步驱动两个旋翼轴,且也能够为尾桨轴提供动力,能够简化传动机构的结构,减少零部件数量,降低维护成本;同时将传动机构的两个动力输出端和尾桨轴布置在一个轴线上,使得整个动力系统的布局紧凑,占用空间小,传动效率高,有利于提升直升机的性能。
如上所述的交叉双旋翼无人直升机的动力系统,还包括尾传动轴组,所述尾传动轴组的输入端通过挠性联轴器与所述第二动力输出端传动连接,所述尾传动轴组的输出端与所述尾桨轴传动连接;并且所述尾传动轴组的轴线与所述尾桨轴的轴线重合。
如上所述的交叉双旋翼无人直升机的动力系统,所述尾传动轴组包括两个以上传动连接的尾传动轴,所述尾传动轴组的各传动连接处以及所述尾传动轴组与所述尾桨轴的传动连接处中,至少有一个传动连接处通过花键传动连接。
如上所述的交叉双旋翼无人直升机的动力系统,所述动力源位于所述尾传动轴组的上方,且位于所述尾传动轴组远离尾桨轴的一端。
如上所述的交叉双旋翼无人直升机的动力系统,所述动力源的输出轴轴线与所述尾传动轴组的轴线处于同一竖直面内。
如上所述的交叉双旋翼无人直升机的动力系统,所述旋翼轴通过支撑架支撑,所述支撑架包括支撑座和至少两个支撑杆,所述旋翼轴穿过所述支撑座,且能够相对所述支撑座转动,所述支撑杆的一端与所述支撑座固接,各所述支撑杆围绕所述旋翼轴布置,且所述支撑杆相对所述旋翼轴倾斜设置。
如上所述的交叉双旋翼无人直升机的动力系统,两个所述支撑架的支撑座通过连接杆固接;和/或,各所述支撑杆与所述支撑座固接的一端的延长线相交于一点,且相交点位于所述旋翼轴的轴线上。
如上所述的交叉双旋翼无人直升机的动力系统,所述传动机构包括第一传动轴、第一主锥齿轮、第二传动轴、第一从锥齿轮、两个第二主锥齿轮以及两个第二从锥齿轮;所述第一主锥齿轮固套于所述第一传动轴的一端,所述第一从锥齿轮固套于所述第二传动轴的中部,两个所述第二主锥齿轮分别固套于所述第二传动轴的两端,两个所述第二从锥齿轮分别固套于两个所述旋翼轴的底端;
所述动力源与所述第一传动轴传动连接,所述第一主锥齿轮与所述第一从锥齿轮啮合,两个所述第二主锥齿轮分别与两个所述第二从锥齿轮啮合;
所述第一传动轴与所述第二传动轴垂直设置,且所述第一传动轴的轴线与所述尾桨轴的轴线重合;所述第一主锥齿轮为所述第一动力输出端,所述第一传动轴的另一端为所述第二动力输出端。
如上所述的交叉双旋翼无人直升机的动力系统,所述动力源通过单向离合器与所述传动机构连接。
本发明还提供一种交叉双旋翼无人直升机,包括机身和安装于所述机身的动力系统,所述动力系统为上述任一项所述的动力系统,所述传动机构通过弹性支承与所述机身连接。
由于上述动力系统具有上述技术效果,所以包括该动力系统的交叉双旋翼无人直升机也具有相同的技术效果,此处不再赘述。
附图说明
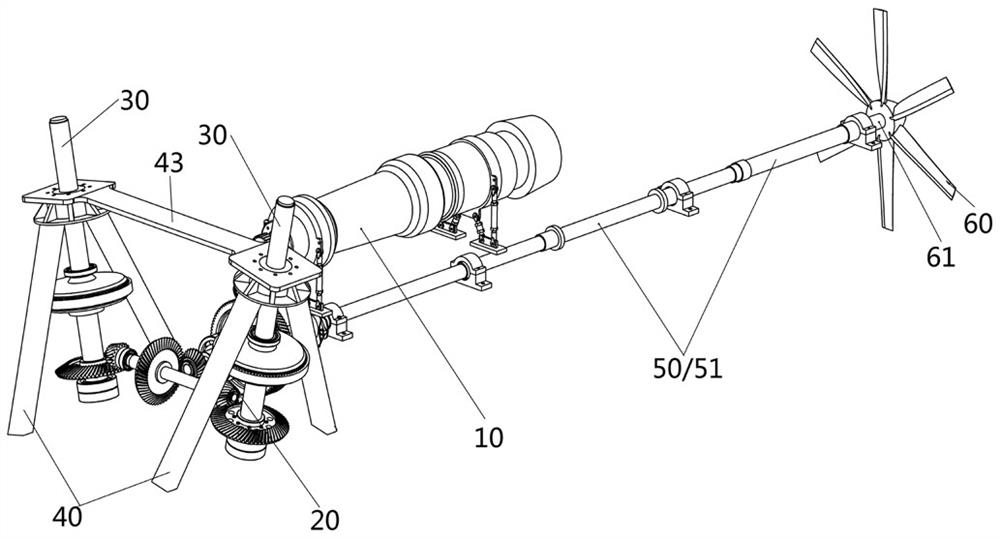
图1为本发明所提供交叉双旋翼无人直升机的动力系统的一种具体实施例的结构示意图;
图2为图1中传动机构和旋翼轴系统的结构示意图;
图3为具体实施例中尾传动轴组的两个尾传动轴连接处的局部放大图。
附图标记说明:
动力源10;
传动机构20,第一传动轴21,第一主锥齿轮22,第二传动轴23,第一从锥齿轮24,第二主锥齿轮25,第二从锥齿轮26,主动齿轮27,从动齿轮28;
旋翼轴30;
支撑架40,支撑座41,支撑杆42,连接杆43;
尾传动轴组50,尾传动轴51,挠性联轴器52,花键53;
尾桨60,尾桨轴61。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
为便于理解和描述简洁,下文结合交叉双旋翼无人直升机及其动力系统一并说明,有益效果部分不再重复论述。
请参考图1,图1为本发明所提供交叉双旋翼无人直升机的动力系统的一种具体实施例的结构示意图。
交叉双旋翼无人直升机包括机身和安装于机身的动力系统,该实施例中,动力系统包括动力源10、两个旋翼轴30和传动机构20,其中,动力源10只设有一个,动力源10与传动机构20传动连接;传动机构20具有两个动力输出端,第一动力输出端用于将来自动力源10的动力传递至两个旋翼轴30,第二动力输出端用于将来自动力源10的动力传递至尾桨60的尾桨轴61,第一动力输出端、第二动力输出端和尾桨轴61处于同一轴线上。
交叉双旋翼无人直升机设有两个旋翼轴30,两个旋翼轴30交叉布置在机身的两侧,可以理解为两个旋翼轴30的延长线可以相交于一个虚点,两个旋翼轴30上的两幅旋翼同步反向旋转。
传动机构20的第一动力输出端传递的动力可以通过传动结构设置分别传递至两个旋翼轴30,使两个旋翼轴30同步反向旋转。
如上设置后,该动力系统只设置一个动力源10,通过该动力源10同步驱动两个旋翼轴30,也能够为尾桨轴61提供动力,可以简化传动机构20的结构,减少零部件数量,降低维护成本;同时将传动机构20的两个动力输出端和尾桨轴61布置在一个轴线上,使得整个动力系统的布局更紧凑,占用空间小,传动效率高,有利于提升直升机的性能。
其中,动力源10通常为发动机,当然实际设置时可以为其他能够提高动力的部件。
请一并参考图2,图2为图1中传动机构和旋翼轴系统的结构示意图。
该实施例中,传动机构20包括第一传动轴21、第一主锥齿轮22、第二传动轴23、第一从锥齿轮24、两个第二主锥齿轮25以及两个第二从锥齿轮26;第一主锥齿轮22固套于第一传动轴21的一端,第一从锥齿轮24固套于第二传动轴23的中部,两个第二主锥齿轮25分别固套于第二传动轴23的两端,两个第二从锥齿轮26分别固套于两个旋翼轴30的底端。
其中,第一传动轴21与动力源10传动连接,第一主锥齿轮22与第一从锥齿轮24啮合,两个第二主锥齿轮25分别与两个第二从锥齿轮26啮合。
第一传动轴21与第二传动轴23相垂直设置,且第一传动轴21的轴线与尾桨轴61的轴线重合,固套在第一传动轴21的第一主锥齿轮22为前述传动机构20的用于将动力传递至旋翼轴30的第一动力输出端,第一传动轴21的另一端为第二动力输出端,即第一传动轴21的另一端与尾桨轴61传动连接。
如上设置后,第一主锥齿轮22的轴线与第一从锥齿轮24的轴线相垂直,即第一主锥齿轮22与第一从锥齿轮24相互正交啮合,可以实现来自动力源10的动力的换向;可以理解,因两个旋翼轴30交叉设置,所以固套于旋翼轴30的第二从锥齿轮26和对应的第二主锥齿轮25的啮合为相互斜交啮合,具体的夹角设置可以根据实际需求来确定。
实际工作时,动力源10的动力传递至第一传动轴21,通过第一主锥齿轮22将动力传递至第一从锥齿轮24和第二传动轴23,经由第二传动轴23两端的第二主锥齿轮25分别将动力传递至两个第二从锥齿轮26,从而传递至两个旋翼轴30,实现一个动力源10同步驱动两个旋翼的目的。
具体的方案中,该动力系统还包括尾传动轴组50,该尾传动轴组50用于将来自动力源10的动力传递至尾桨轴61,具体地,尾传动轴组50的输入端通过挠性联轴器52与传动机构20的第二动力输出端,即第一传动轴21的另一端传动连接,尾传动轴组50的输出端与尾桨轴61传动连接,如图1所示,尾传动轴组50的轴线与尾桨轴61的轴线重合,可以理解为尾传动轴组50与尾桨轴61同轴同心设置,如此布置后,尾桨60为推力尾桨,能够提升直升机的性能。
其中,尾传动轴组50通过挠性联轴器52与第一传动轴21连接,能够对尾传动轴组50进行角度补偿。
具体布置时,尾传动轴组50包括两个以上的尾传动轴51,所有尾传动轴51依次传动连接,显然,各尾传动轴51的轴线均与尾桨轴61的轴线重合。具体的,尾传动轴组50的各传动连接处(相邻两个尾传动轴51的传动连接处)或者尾传动轴组50与尾桨轴61的传动连接处中,至少有一个传动连接处通过花键53传动连接,花键53的设置可以对尾传动轴组50进行长度补偿。如图3所示,其示出了两个尾传动轴51之间通过花键53连接的结构。
具体的方案中,动力源10位于尾传动轴组50的上方,且靠近旋翼轴30位置设置,也即位于尾传动轴组50远离尾桨轴61的一端,更具体的,动力源10的输出轴轴线与尾传动轴组50的轴线处于同一竖直面内,如此设置,使重力分布相对合理且均匀,有利于提升直升机的性能。
如前所述,第一传动轴21的轴线与尾桨轴61的轴线重合,即与尾传动轴组50的轴线重合,动力源10的输出轴位于尾传动轴组50的上方,且两者的轴线处于同一竖直面,也就是说,动力源10的输出轴与第一传动轴21平行,动力源10的输出轴也位于第一传动轴21的上方,具体设置时,可在动力源10的输出轴上固套主动齿轮27,在第一传动轴21上固套从动齿轮28,主动齿轮27与从动齿轮28啮合,如此实现动力源10至第一传动轴21的动力传递。
具体的方案中,动力源10具体通过单向离合器与传动机构20连接,使得动力只能自动力源10至传动机构20的方向单向传动,避免动力消耗,使操作更加简单。
该实施例中,动力系统的旋翼轴30通过支撑架40支撑,对应于每个旋翼轴30,支撑架40设有一个支撑座41和至少两个支撑杆42,其中,旋翼轴30穿过对应的支撑座41,且能够相对支撑座41转动,具体可以在旋翼轴30和支撑座41之间设置轴承,支撑杆42的一端与支撑座41固接,各支撑杆42围绕旋翼轴30布置,且支撑杆42相对旋翼轴30倾斜设置,如图1和图2所示,支撑杆42与支撑座41固接的一端靠近旋翼轴30,支撑杆42的另一端相对远离旋翼轴30,在安装时,支撑杆42可与交叉双旋翼无人直升机的机身连接。
如上设置后,旋翼轴30通过支撑架40来支撑,支撑架40的下端与机身连接,对旋翼轴30起到隔振效果,能够有效地降低安装于旋翼轴30的旋翼的桨毂上传递到机身的旋翼旋转平面的交变力和交变力矩,结构简单可靠,维护成本较低。
图示方案中,每个支撑座41对应设有两个支撑杆42,可以理解,实际设置时,支撑杆42的数目和排布可以根据实际需求进行调整。
具体的,两个支撑架40的两个支撑座41还通过连接杆43固接,还可以使每个支撑座41连接的各支撑杆42的延长线的相交点位于旋翼轴30的轴线上,以进一步提高支撑效果。可以理解,各支撑杆42的延长线的交点显然是各支撑杆42与支撑座41固接的一端的延长线的相交点。
具体的方案中,动力系统的传动机构20通过弹性支承与机身连接,结合前述旋翼轴30通过支撑架40与机身连接,这样,传动机构20和旋翼系统垂向的频率较高,而绕支撑架40的各支撑杆42的延长线的交点的摆动频率较低,从而在保证传动机构20和旋翼系统垂向刚度的同时,能够减小旋翼旋转平面内的激励力或力矩的传递率。
以上对本发明所提供的交叉双旋翼无人直升机及其动力系统均进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
- 动力系统及具有该动力系统的交叉双旋翼无人直升机
- 交叉双旋翼无人直升机及其动力系统