一种基于气动串联弹性驱动器的可穿戴式康复器械手套
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及康复机器人领域,具体涉及一种基于气动串联弹性驱动器的可穿戴式康复器械手套。
背景技术
由神经机能损伤导致的手功能障碍是一种常见的肢体运动障碍,且随着社会老龄化,患手功能障碍的人群越来越多。就传统康复项目而言,康复训练内容枯燥乏味,康复设备多笨重且复杂。此外,传统的康复机械结构为了保证高速和高精度的性能,往往采用刚性驱动器,一旦出现操作失误,将对使用者的安全造成威胁。
串联弹性驱动器(SEA),是一种将弹性元件串联在电机和机械装置之间的柔性弹性驱动器,现代机械设计中常常加入SEA,可以让整个机械装置具有一定的柔性,增加人机交互能力,将SEA应用到康复机械中提高康复器械的柔性、更好地模拟人体运动轨迹是康复器械未来研究的一个方向。
发明内容
针对现有技术的缺陷,本发明的目的在于提供一种基于气动串联弹性驱动器的可穿戴式康复器械手套,通过气动驱动传动杆组带动手套部分的各手指机构进行模拟人手运动,从而辅助患者进行手部康复,相比传统手部康复器械,具有良好的柔顺性、人机交互性和轻便性,结构设计也更符合人体工学规律,具有良好的应用前景。
为了达到上述目的,本发明所采用的技术方案是:
一种基于气动串联弹性驱动器的可穿戴式康复器械手套,用于辅助患者进行手部康复,包括手套部分、传动杆组和气缸驱动三部分,所述手套部分包括拇指机构、食指机构、中指机构、无名指机构、小指机构、掌套和小臂套,传动杆组包括拇指杆组、食指杆组、中指杆组、无名指杆组、小指杆组和拇指开合杆组,气动驱动包括拇指气缸、食指气缸、中指气缸、无名指气缸、小指气缸和拇指开合气缸,手套部分的各部件分别由传动杆组的各杆件连接在一起,气动驱动安装在手套部分上并和传动杆组连接,气动驱动的气缸和传动杆组之间串联有弹性元件,手套部分供康复者穿戴,气动驱动的各个气缸带动传动杆组动作从而带动手套部分的各手指机构进行模拟人手轨迹运动。
进一步地,所述拇指机构由拇指指尖套筒、拇指指末套筒和虎口套筒所组成,拇指指尖套筒顶部设有一个连接凸台,拇指指末套筒顶部设有两个连接凸台,虎口套筒上设有一个连接凸台和一个球窝连接台,四个连接凸台分别与拇指杆组相连接,球窝连接台用于和拇指开合杆组连接,拇指指尖套筒尾部与拇指指末套筒头部各有两个连接处,通过在该两个连接处插上圆柱梢将拇指指尖套筒尾部与拇指指末套筒连接在一起。
拇指杆组包括拇指杆件一、拇指杆件二、拇指杆件三、拇指杆件四、拇指杆件五和拇指杆件六,其中拇指杆件一的一端与拇指指尖套筒顶部的连接凸台铰接,另一端与拇指杆件二和拇指杆件四铰接,拇指杆件四的另一端与拇指指末套筒顶部前端的连接凸台铰接,拇指指末套筒顶部后端的连接凸台与拇指杆件六一端铰接;拇指杆件六另一端与虎口套筒上方连接凸台铰接;与虎口套筒上方连接凸台铰接的还有拇指杆件五;拇指杆件五另一端与拇指杆件二另一端铰接;与拇指杆件二另一端铰接还有拇指杆件三;拇指杆件三的另一端与拇指气缸的气缸杆轴向固定连接。
拇指开合杆组由开合杆件一、开合杆件二、开合杆件三和开合杆件四组成,其中开合杆件一一端和虎口套筒上的球窝连接台铰接形成球关节,另一端和开合杆件二、开合杆件三铰接;开合杆件二另一端与掌套上的球窝连接台铰接形成球关节,开合杆件三另一端与开合杆件四铰接,开合杆件四与拇指开合气缸的气缸杆轴向固定连接,当气缸杆进行往复运动时,带动拇指开合杆组动作,能够使虎口进行开合运动。
进一步地,所述食指机构由食指指尖套筒、食指指中套筒和食指指末套筒所组成,食指指尖套筒顶部设有一个连接凸台,食指指中套筒顶部设有一个连接凸台,食指指末套筒顶部设有两个连接凸台,四个连接凸台分别与食指杆组相连接,食指指尖套筒尾部与食指指末套筒头部各有两个连接处,食指指中套筒头尾部分各有两个连接处,利用圆柱销分别依次连接食指指尖套筒末尾与食指指中套筒头部、食指指中套筒尾部和食指指末套筒头部。
食指杆组由食指杆件一、食指杆件二、食指杆件三、食指杆件四、食指杆件五、食指杆件六、食指杆件七、食指杆件八和食指杆件九组成,其中食指杆件一的一端与食指指尖套筒上的连接凸台铰接;另一端与食指杆件二和食指杆件七铰接;食指杆件二另一端与食指指中套筒上的连接凸台铰接,食指杆件七另一端与食指杆件八和食指杆件三铰接;食指杆件三另一端与食指指末套筒前端的连接凸台铰接,食指杆件八另一端与食指杆件六和食指杆件九铰接;食指杆件六另一端与掌套上食指对应的连接凸台以及食指杆件五铰接,食指杆件五另一端与食指杆件四铰接;食指杆件四另一端与食指指末套筒末端的连接凸台铰接,食指杆件九另一端与食指气缸的气缸杆轴向固定连接。
进一步地,所述中指机构、无名指机构和小指机构与食指机构构造相同,不同之处为各个套筒根据人各手指不同而长度、粗细有所变化,中指杆组、无名指杆组、小指杆组与食指杆组构造相同,不同之处为各个杆件据人手指长度、运动轨迹不同而长度有所变化。
进一步地,掌套为符合人体手掌构型的曲面掌套,掌套上方设置有四个连接凸台和一个球窝连接台,四个连接凸台处在同一高度上,分别对应食指杆组、中指杆组、无名指杆组和小指杆组,球窝形连接台则安置在掌套上方靠后处,与拇指开合杆组对应。
进一步地,小臂套为一体设计的符合人小臂形态的曲面构型,包括小臂套筒、气缸安置排架、开合气缸安置架和远端气缸安置架,气缸安置排架安放在小臂套筒正上方,其上设置四个并排的圆柱形槽分别用于安置食指气缸、中指气缸、无名指气缸和小指气缸;开合气缸安置架设置在小臂套侧面,用于安置拇指开合气缸;远端气缸安置架通过刚性结构支撑安放在小臂套的侧面远端,用于安置拇指气缸。
进一步地,所述拇指气缸、食指气缸、中指气缸、无名指气缸、小指气缸和拇指开合气缸的结构相同,主要由气缸杆、弹簧和气缸体组成,其中弹簧穿设在气缸杆上,气缸杆与传动杆组末端的杆件轴向固定连接,传动杆组末端的杆件上设置有凸缘用于对弹簧进行轴向限位,随气缸杆的往复直线运动,弹簧将进行伸缩运动。
有益效果:本发明的一种基于气动串联弹性驱动器的可穿戴式康复器械手套,,可顺利模仿人手拇指屈伸、开合和食指、中指、无名指、小指屈伸的运动方式,在驱动机构与传动杆组之间添加了弹簧,采用气动驱动,结构紧凑且具有轻便可靠的优点,保证了传动精度和平稳性,对比现有技术中的其他康复手套,本发明具有更好的柔顺性、人机交互性和轻便性。
本发明的手套部分使用指节套筒仿人手指指节,使用传动杆组将各指节连接,结构设计更贴合人体工学规律;其中拇指机构为单自由度机构,拇指处还设计了一套开合机构以满足控制拇指的开合运动,食指、中指、无名指和小指机构为三自由度欠驱动机构,通过优化设计得出传动杆组的相应杆长,能够使机构顺利模拟人手指运动规律,且欠驱动设计和末端弹簧使机构具有一定的柔顺性。
本发明在康复手套中创新性的引入弹性控制和欠驱动杆件设计,为基于气动串联弹性驱动器的可穿戴式康复器械手套的研究提供了良好的基础。
附图说明
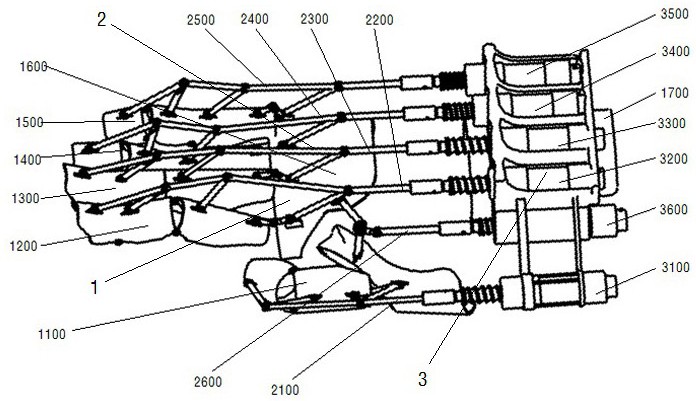
图1是本发明的整体结构立体示意图。
图2是图1中拇指部分的立体示意图。
图3是图1中食指部分的立体示意图。
图4是图1中拇指开合部分的立体示意图。
图5是图1中驱动部分的立体示意图。
图6是图1中虎口套筒立体示意图。
图7是图1中掌套的立体示意图。
图8是图1中小臂套的立体示意图。
图9是图1中拇指部分的理论结构图。
图10是图1中食指部分的省略理论结构图。
具体实施方式
下面结合附图和具体实施例对本发明做进一步详细的说明。
如图1-8所示,一种基于气动串联弹性驱动器的可穿戴式康复器械手套,包括手套部分1、传动杆组2和气动驱动3三部分;手套部分1包括各个手指、手掌和手臂的套筒;传动杆组2包括各个手指运动所需的杆件组;气动驱动3包括各个杆组所需的气缸驱动以及柔性驱动所需的弹簧;手套部分1的各个部件由传动杆组2的各个杆件连接在一起,气动驱动3安装在手套部分1上并和传动杆组2相连接;气动驱动3可通过带动传动杆组2从而带动手套部分1对各个手指进行运动控制从而模拟人手轨迹运动。
手套部分1由拇指机构1100、食指机构1200、中指机构1300、无名指机构1400、小指机构1500、掌套1600和小臂套1700所组成;传动杆组2由拇指杆组2100、食指杆组2200、中指杆组2300、无名指杆组2400、小指杆组2500和拇指开合杆组2600组成;气动驱动3由拇指气缸3100、食指气缸3200、中指气缸3300、无名指气缸3400、小指气缸3500和拇指开合气缸3600组成。
拇指部分包括拇指机构1100、拇指杆组2100和拇指气缸3100,拇指机构1100用于患者穿戴在拇指及虎口上。
如图2所示,拇指机构1100由拇指指尖套筒1101、拇指指末套筒1102和虎口套筒1103所组成;拇指指尖套筒1101顶部设有一个连接凸台,拇指指末套筒1102顶部设有两个连接凸台,虎口套筒上设有一个连接凸台及一个球窝连接台,四个连接凸台分别与拇指杆组2100相连接,虎口套筒上的球窝连接台用于和拇指开合杆组2600连接,拇指指尖套筒1101尾部与拇指指末套筒1102头部各有两个连接处,通过圆柱梢穿过该两个连接处将两套筒连接在一起。
拇指杆组2100包括拇指杆件一2101、拇指杆件二2102、拇指杆件三2103、拇指杆件四2104、拇指杆件五2105和拇指杆件六2106,其中拇指杆件一2101一端与拇指指尖套筒1101顶部的连接凸台铰接,另一端与拇指杆件二2102和拇指杆件四2104铰接,拇指杆件四2104的另一端与拇指指末套筒1102顶部前端的连接凸台铰接,拇指指末套筒1102顶部后端的连接凸台与拇指杆件六2106一端铰接;拇指杆件六2106另一端与虎口套筒1103上方连接凸台铰接;与虎口套筒1103上方连接凸台铰接的还有拇指杆件五2105;拇指杆件五2105另一端与拇指杆件二2102另一端铰接;与拇指杆件二2102另一端铰接还有拇指杆件三2103;拇指杆件三2103的另一端与拇指气缸3100的气缸杆3101轴向固定连接。
食指部分由食指机构1200、食指杆组2200、食指气缸3200和掌套1600组成,用于患者穿戴在食指上。
如图3所示,所述食指机构1200由食指指尖套筒1201、食指指中套筒1202和食指指末套筒1203所组成,食指指尖套筒1201顶部设有一个连接凸台,食指指中套筒1202顶部设有一个连接凸台,食指指末套筒1203顶部设有两个连接凸台,四个连接凸台分别与食指杆组2200相连接,食指指尖套筒1201尾部与食指指末套筒1203头部各有两个连接处,食指指中套筒1202头尾部分各有两个连接处,利用圆柱销分别依次连接食指指尖套筒1201末尾与食指指中套筒1202头部、食指指中套筒1202尾部和食指指末套筒1203头部。
食指杆组2200由食指杆件一2201、食指杆件二2202、食指杆件三2203、食指杆件四2204、食指杆件五2205、食指杆件六2206、食指杆件七2207、食指杆件八2208和食指杆件九2209组成,其中食指杆件一2201一端与食指指尖套筒1201上的连接凸台铰接;另一端与食指杆件二2202和食指杆件七2207铰接;食指杆件二2202另一端与食指指中套筒1202上的连接凸台铰接,食指杆件七2207另一端与食指杆件八2208和食指杆件三2203铰接;食指杆件三2203另一端与食指指末套筒1203前端的连接凸台铰接,食指杆件八2208另一端与食指杆件六2206和食指杆件九2209铰接;食指杆件六2206另一端与掌套1600上食指对应的连接凸台以及食指杆件五2205铰接,食指杆件五2205另一端与食指杆件四2204铰接;食指杆件四2204另一端与食指指末套筒1203末端的连接凸台铰接,食指杆件九2209另一端与食指气缸3200的气缸杆轴向固定连接。
中指机构1300、无名指机构1400和小指机构1500与食指机构1200构造相同,其不同之处为各个套筒根据人手指长度不同而长度、粗细有所变化,在此不再赘述这三个机构的构造。
中指杆组2300、无名指杆组2400、小指杆组2500与食指杆组2200构造完全相同,其不同之处为各个杆件据人手指长度、运动轨迹不同而长度有所变化,在此不再赘述这三个杆组的构造。
如图4和6,拇指开合杆组2600由开合杆件一2601、开合杆件二2602、开合杆件三2603和开合杆件2604四组成,其中开合杆件一2601一端和虎口套1103上的球窝连接台铰接形成球关节,另一端和开合杆件二2602、开合杆件三2603铰接;开合杆件二2602另一端与掌套1600上的球窝连接台铰接形成球关节,开合杆件三2603另一端与开合杆件四2604铰接,开合杆件四2604与拇指开合气缸3600的气缸杆轴向固定连接,当气缸杆进行往复运动时,带动拇指开合杆组动作,能够使虎口进行开合运动。
如图7,掌套1600为符合人体手掌构型的曲面掌套,用于穿戴在患者手掌上,掌套1600上方具有四个连接凸台与一个球窝形连接台,四个连接凸台处在同一高度上,分别对应食指杆组2200、中指杆组2300、无名指杆组2400和小指杆组2500,球窝形连接台则安置在掌套1600上方靠后处,与拇指开合杆组2600对应。
如图8,小臂套1700为一体设计的符合人小臂形态的曲面构型,用于穿戴在患者小臂上,起到安置气动驱动3中的气缸的作用,包括小臂套筒1701、气缸安置排架1702、开合气缸安置架1703和远端气缸安置架1704,气缸安置排架1702安放在小臂套筒1701正上方,其上设置四个并排的圆柱形凹槽结构分别用于安置食指气缸3200、中指气缸3300、无名指气缸3400和小指气缸3500;开合气缸安置架1703设置在小臂套1700侧面,用于安置拇指开合气缸3600;远端气缸安置架1704通过刚性结构支撑安放在小臂套1700的侧面远端,用于安置拇指气缸3100。
所述拇指气缸3100、食指气缸3200、中指气缸3300、无名指气缸3400、小指气缸3500和拇指开合气缸3600的结构相同,如图5,拇指气缸3100主要由气缸杆3101、弹簧3102和气缸体3103组成;其中弹簧3102穿设在气缸杆3101上,气缸杆3101与传动杆组末端的杆件轴向固定连接,传动杆组末端的杆件上设置有凸缘用于对弹簧3102进行轴向限位,随气缸杆3101的往复直线运动,弹簧3102将进行伸缩运动。
拇指气缸3100安装在远端气缸安置架1704处,负责拇指的运动;食指气缸3200、中指气缸3300、无名指气缸3400和小指气缸3500安装在气缸安置排架1702处,分别负责食指、中指、无名指和小指的运动;拇指开合气缸3600安装在开合气缸安置架1703处,负责拇指的开合运动。
具体地,气缸杆与传动杆组末端的杆件通过螺纹连接的方式相连,或通过在传动杆组末端的杆件上设置套筒,气缸杆穿到套筒中并通过插入圆柱销进行固定连接;气缸体3103采用普通标准气缸,其具体结构不再赘述。
拇指气缸3100的充放气过程将带动气缸杆3101进行往复直线运动,气缸杆3101的往复直线运动将将推动拇指杆件三2103从而推动整个拇指杆组2100运动,拇指杆组2100的运动带动整个拇指部分的屈伸运动,如图9所示,拇指杆组2100与拇指机构1100组成的机构具有一个自由度,故经过优化计算后的特定杆件长度可达到使拇指机构1100按人体拇指运动轨迹运动的目的,由于拇指部分为单自由度设计,故其运动轨迹固定,其柔顺性由弹簧3102实现。
食指气缸3200的充放气过程将带动气缸杆进行往复直线运动,气缸杆的运动将推动食指杆件九2209从而推动整个食指杆组2200带动整个食指部分进行屈伸运动,食指杆件四2204和食指杆件五2205是为了食指机构1200与掌套1600之间的轻微位移而设计的,在理论计算时可忽略这两根杆件,将食指指末套筒1203与掌套1600看作一根不可相互运动的刚性杆,然后我们将得到一个具有三自由度的食指模型,如图10所示,由于只有一个驱动,食指的运动为欠自由度运动,根据优化设计计算,我们可以计算得到一组能较好匹配人体食指运动轨迹的杆件长度,从而使食指机构1200能达到辅助康复人体食指运动的目的,欠自由度驱与弹簧可使机构具有一定的柔顺性。
拇指开合气缸3600的气缸杆进行往复直线运动时,可使虎口进行开合运动,此开合运动是为患者提供一定的力量而设计。
本发明所述的可穿戴式辅助康复器械手套,用于患者手部康复的辅助、康复,通过各个气缸体的充气放气使各个气缸杆进行往复直线运动,各气缸杆的往复直线运动将推动各个杆件组的运动,各杆件组在驱动下将按照理论计算结果与实际受力结果进行类人手运动,包括人手拇指屈伸、开合和食指、中指、无名指、小指屈伸,从而模仿人手的各种抓握开合运动;其中弹簧的加入与欠驱动的设计,使得机构具有很好的柔顺性,从而保证人机交互的安全性。本发明创新性的引入弹性控制和欠驱动杆件设计,为基于气动串联弹性驱动器的可穿戴式康复器械手套的设计发明奠定了结构基础。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种基于气动串联弹性驱动器的可穿戴式康复器械手套
- 基于串联弹性驱动器的上肢用康复外骨骼机器人及方法