一种高临界转速的磁悬浮电机及透平电机系统
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及磁悬浮电机领域,尤其涉及一种高临界转速的磁悬浮电机。
背景技术
磁悬浮电机由于其高速、节能、清洁等特性在工业、医疗等领域获得了极大的推广。磁悬浮电机的优点在于,转子旋转时与轴承不存在机械接触,因此转子的转速理论上取决于材料本身的强度。但在目前的工业实际应用中,磁悬浮电机的转子转速超过临界转速时电机将不能稳定工作。因此为了使得转子的工作转速尽可能的高,需要将磁悬浮电机的转子长度设计的尽可能的短。这导致现有磁悬浮电机的转子长度受到极大的限制。在工业应用中,往往有许多场合需要电机的转子转速较高的同时转子长度也长。但由于磁悬浮电机的转子越长,其临界转速越低,可允许的工作转速越低。因此不能应用于上述场合,这大大限制了磁悬浮电机的应用领域及场景。
目前现有磁悬浮电机在上述领域仍没有稳定实现的实际案例。现有设计针对磁悬浮电机较长转子的高速工作的解决思路是解决磁悬浮电机在柔性状态下的稳定工作问题。因为当磁悬浮电机的转子达到或超过一阶临界转速时磁悬浮电机转子由刚性转子变为柔性转子,解决了磁悬浮电机柔性转子的工作问题,便可以一定程度上解决磁悬浮电机较长转子的高速工作问题。
具体地,国内外针对柔性转子的研究主要有两方面,一种是同步振动抑制,二是运用现代控制理论或鲁棒控制理论设计控制方案以提高支承阻尼。但这两种方案仍处于实验阶段。其中同步振动抑制技术难以解决实际柔性转子系统的不平衡振动问题。这是由于转子在亚临界及超临界状态将产生弯曲变形,不平衡质量所引起的振动与转子弯曲变形状态有关,远比刚性转子系统复杂,因而目前同步振动抑制技术主要针对刚性转子系统。而现代控制理论或鲁棒控制理论设计控制的方案目前仍处于实验室阶段,目前难以做到大幅度提高系统在亚临界及超临界的工作稳定性。
发明内容
本发明的技术方案是:一种高临界转速的磁悬浮电机及透平电机系统,实现磁悬浮电机细长转子的高速工作的目的。
由于磁悬浮电机转子的长度过长导致临界转速低,进一步导致转子转速受限。因此将使用长度较长的转子分成若干个长度较短的转子,再将这若干个长度较短的转子连接起来。由于这若干个长度较短的转子各自的临界转速较高,连接后的电机整体转速也得到提升,且电机整体的临界转速取决于临界转速最低一段的转子。
具体的,一种高临界转速的磁悬浮电机,包括:磁悬浮转子及磁悬浮定子;磁悬浮转子在轴端处设置扭矩传递装置,以实现多个电机的转子轴之间的扭矩传递或同一电机中相邻的转子轴分段之间的扭矩传递。
扭矩传递装置传递的扭矩方向和转子轴线是同轴关系,一般的,扭矩传递装置包括非接触式连接装置,非接触式连接装置主要传递扭矩,实际情况中若传递一些弯矩也可以使用。
非接触式连接装置包括单不限于:永磁耦合器、柔性联轴器、永磁涡流传动器。其中,永磁耦合器可是径向耦合力矩式永磁耦合器,也可是轴向耦合力矩式永磁耦合器。
若使用接触式连接方式,那么,若干个较短的转子之间仍然会有力的传导即传递弯矩,此时这若干个长度较短的转子的整体又形成了长转子,其临界转速依旧没有得到提升,因此接触式连接方式不适用于本发明。相比于接触式连接方式,使用非接触式连接方式可以只传递扭矩而不传递弯矩,因此连接后的整体的临界转速取决于前述若干个转子长度较小电机中转子长度最长的电机。当然,非接触式连接方式也可能产生部分的力矩传递(实际过程并非绝对),这种力矩传递情况并非本方案的设计初衷,是实际过程中无法避免的。例如,包括但不限于在电机运行过程中因特殊工作场景或非正常的工作状态(例如震颤)等情况。
具体的,本发明的一种布置方式为:多个短轴长的磁悬浮电机的连接布置,把相邻的磁悬浮电机之间通过各磁悬浮转子轴端部的扭矩传递装置(主要是非接触式连接装置)进行轴向对接。当若干个短轴长的磁悬浮电机采用非接触式连接装置对接工作时,每个磁悬浮电机产生的磁场是可以是同步且相同的,也可以不同步(例如涡流传动器)。
具体的,本发明的另一种布置方式为:单个磁悬浮电机,而单个磁悬浮电机的转子分成若干转子轴分段,相邻的转子轴分段之间通过扭矩传递装置(主要是非接触式连接装置)进行轴向对接。
本发明还进一步的公开了一种透平电机系统,该透平电机系统包括压缩机或泵或发电机或膨胀机,其使用了具有上述特征的磁悬浮电机。即磁悬浮转子在轴端处设置非接触式连接装置,以实现多个电机的转子轴在同一轴线上的扭矩传递或同一电机中不同转子轴分段在同一轴线向上的扭矩传递。
本发明的优点是:能够实现磁悬浮电机细长转子的高速工作,让磁悬浮电机在轴向长度较长的情况下获得更大转速的能力。
附图说明
下面结合附图及实施例对本发明作进一步描述:
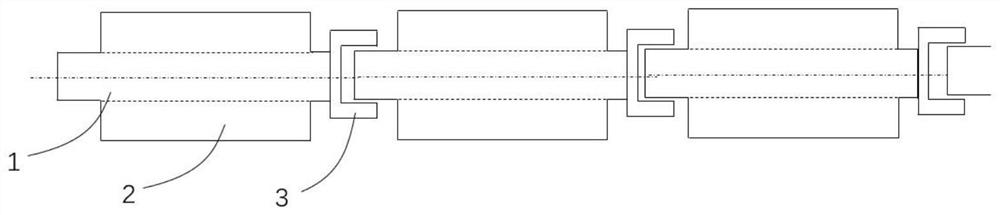
图1为多个短轴长的磁悬浮电机采用非接触式连接装置连接的原理图;
图2为单个磁悬浮电机中多个转子轴分段之间采用非接触式连接装置连接的原理图;
图3为转子在一阶临界转速时发生的形变示意图;
图4为是将转子分成若干个长度较短的转子轴分段之后临界转速时发生的形变示意图;
其中,1、转子;11、转子轴分段;2、定子;3、非接触式连接装置。
具体实施方式
实施例1:
一种高临界转速的磁悬浮电机,包括:磁悬浮转子及磁悬浮定子;磁悬浮转子在轴端处设置非接触式连接装置,以实现多个电机的转子轴在同一轴线上的扭矩传递。
因此,使用多个短轴长的磁悬浮电机连接布置,把相邻的磁悬浮电机之间通过各磁悬浮转子轴端部的非接触式连接装置进行轴向对接。当若干个短轴长的磁悬浮电机采用非接触式连接装置对接工作时,每个磁悬浮电机产生的磁场是同步且相同的。
如图1所示,包含转子1、定子2、非接触式连接装置3。工作时,转子1高速旋转,非接触式连接装置3作为中间媒介连接两端的磁悬浮电机,且只传递扭矩。由于这若干个长度较短的转子各自的临界转速较高,连接后的电机整体转速也得到提升。
实施例2:
一种高临界转速的磁悬浮电机,包括:磁悬浮转子及磁悬浮定子;磁悬浮转子在轴端处设置非接触式连接装置,以实现同一电机中相邻的转子轴分段在同一轴线向上的扭矩传递。
因此,使用单个磁悬浮电机,而单个磁悬浮电机的转子分成若干转子轴分段,相邻的转子轴分段之间通过非接触式连接装置进行轴向对接。
图2所示的实现方式,本实施例中使用了一个磁悬浮电机,将转子分成若干个长度较短的转子轴分段,相邻的转子轴分段之间通过非接触式连接装置3进行连接。将转子分成若干个长度较短的转子轴分段之后,各个转子轴分段的临界转速都是独立的。
本发明实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明的。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明的所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种高临界转速的磁悬浮电机及透平电机系统
- 一种高临界转速的磁悬浮电机及透平电机系统