一种塑料加工用塑料圆柱切割设备
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及一种塑料圆柱切割设,更具体的说是一种塑料加工用塑料圆柱切割设备。
背景技术
在塑料圆柱加工时,经常需要给塑料圆柱切割,大多数设备功能单一,且需要多个工艺流程,但是市面上没有较好的塑料圆柱切割设备,所以设计了这种塑料加工用塑料圆柱切割设备。
发明内容
本发明主要解决的技术问题是提供一种塑料加工用塑料圆柱切割设备,设备能够将塑料圆柱传送并将塑料圆柱旋转,设备能够在塑料圆柱传送旋转时将塑料圆柱切割成较短的圆柱,设备能够将较短的圆柱传送至收集箱里,设备能够将塑料圆柱切割成小球。
为解决上述技术问题,本发明涉及一种取样设备,更具体的说是一种塑料加工用塑料圆柱切割设备,包括传送旋转联动机构、间歇切割联动机构、球型切割机构,设备能够将塑料圆柱传送并将塑料圆柱旋转,设备能够在塑料圆柱传送旋转时将塑料圆柱切割成较短的圆柱,设备能够将较短的圆柱传送至收集箱里,设备能够将塑料圆柱切割成小球。
传送旋转联动机构与间歇切割联动机构连接,间歇切割联动机构与球型切割机构连接,球型切割机构与传送旋转联动机构连接。
作为本技术方案的进一步优化,本发明一种塑料加工用塑料圆柱切割设备,所述的传送旋转联动机构包括复位柱、复位连接块、复位拉簧、限位三角块、限位条、滑动板、拉手、电机滑动限位板、电机、电机轴、摩擦轮、连接板a、连接轴a、摩擦轮a、连接板b、摩擦轮b、连接轴b、连接板c、限位弹簧、连接板d、拉手a、连接板e、连接板f、小摩擦轮、大摩擦轮、连接轴c、皮带、连接轴d、连接板g、斜齿轮a、斜齿轮b、传送轮、轴承圈、轴承圈下连接块、拉簧、轴承圈上连接块、连接板k、拉手b、设备安装板、加工圆柱、连接轴l、连接板m,复位柱与复位连接块滑动连接,复位连接块与设备安装板连接,复位拉簧套在复位柱上且限位于复位连接块与限位三角块,限位三角块与轴承圈下连接块上的槽滑动连接,限位条与设备安装板连接,滑动板与限位三角块滑动连接,滑动板与拉手连接,滑动板与电机滑动限位板滑动连接,电机滑动限位板与设备安装板连接,电机与滑动板连接,电机与电机轴连接,电机轴与摩擦轮连接,电机轴与连接板a滑动连接,摩擦轮与摩擦轮a摩擦连接,连接板a与设备安装板连接,连接轴a与摩擦轮a连接,连接轴a与小摩擦轮连接,连接轴a与连接板g轴承连接,摩擦轮a与摩擦轮b摩擦连接,连接板b与连接板e连接,连接板b与连接轴c轴承连接,连接板b与设备安装板连接,连接板b与连接板m连接,摩擦轮b与连接轴b连接,摩擦轮b与连接板e滑动连接,连接轴b与连接板c轴承连接,连接板c与连接板d连接,连接板c与连接板e滑动连接,限位弹簧一端与连接板d连接另一端与连接板f连接,连接板d与拉手a连接,连接板e与轴承圈上连接块滑动连接,连接板e与设备安装板连接,连接板e上的槽与连接轴l滑动连接,连接板f与连接板e连接,小摩擦轮与大摩擦轮摩擦连接,大摩擦轮与连接轴c连接,连接轴c与连接板g轴承连接,皮带一端与连接轴c摩擦连接,另一端与连接轴d摩擦连接,连接轴d与连接板g轴承连接,连接轴d与斜齿轮a连接,连接板g与设备安装板连接,斜齿轮a与斜齿轮b相啮合,斜齿轮b与连接轴l连接,传送轮与连接轴l连接,轴承圈与轴承圈下连接块连接,轴承圈与轴承圈上连接块连接,轴承圈与连接轴l轴承连接,拉簧一端与轴承圈下连接块连接,另一端与设备安装板连接,轴承圈上连接块与连接板k连接,连接板k与拉手b连接,设备安装板与加工圆柱滑动连接。
作为本技术方案的进一步优化,本发明一种塑料加工用塑料圆柱切割设备,所述的间歇切割联动机构包括联动摩擦轮a、传动轴a、联动摩擦轮b、轴承连接板、异形摩擦轮、传动轴b、扭力弹簧、安装板a、安装板b、切割刀、安装板c、切割刀限位条、输出连接轮、输出拨动块、输出滑动块、输出复位轴、安装板d、联动拉簧、输出连接箱、安装板e,联动摩擦轮a与皮带摩擦连接,联动摩擦轮a与传动轴a连接,传动轴a与连接板m轴承连接,传动轴a与联动摩擦轮b连接,传动轴a与轴承连接板轴承连接,联动摩擦轮b与异形摩擦轮摩擦连接,轴承连接板与传动轴b轴承连接,异形摩擦轮与传动轴b连接,传动轴b与安装板a连接,传动轴b与安装板b轴承连接,传动轴b与安装板c螺纹连接,扭力弹簧套在传动轴b上且限位于轴承连接板与安装板a,安装板b与切割刀连接,切割刀与切割刀限位条连接,切割刀与连接板m滑动连接,安装板c与连接板e连接,输出连接轮与连接轴a连接,输出连接轮与输出拨动块连接,输出滑动块与输出拨动块滑动连接,输出复位轴与安装板d滑动连接,安装板d与设备安装板连接,联动拉簧套在输出复位轴上且限位于输出滑动块与安装板d,输出连接箱与设备安装板连接,安装板e与设备安装板连接,安装板e与输出滑动块滑动连接。
作为本技术方案的进一步优化,本发明一种塑料加工用塑料圆柱切割设备,所述的球型切割机构包括橡胶柱、刹车块、拉动柱、刹车连接板、刹车连接弹簧、连接板一、连接板二、斜齿轮a、连接轴一、连接板三、连接板四、半圆刀、旋转摩擦轮、切割摩擦轮a、斜齿轮b、连接轴二、连接板五,橡胶柱一端与滑动板连接另一端与刹车块连接,刹车块与拉动柱连接,拉动柱与刹车连接板滑动连接,刹车连接板与设备安装板连接,刹车连接弹簧套在拉动柱上且限位于刹车块与刹车连接板,连接板一与安装板e连接,连接板一与连接板二连接,连接板二与连接轴一轴承连接,斜齿轮a与连接轴一连接,斜齿轮a与斜齿轮b相啮合,连接轴一与连接板三螺纹连接,连接轴一与连接板四连接,连接板三与安装板e连接,连接板四与半圆刀连接,连接板四与安装板e滑动连接,半圆刀与安装板e滑动连接,旋转摩擦轮与电机轴连接,切割摩擦轮a与连接轴a连接,切割摩擦轮a与斜齿轮b摩擦连接,斜齿轮b与连接轴二连接,连接轴二与连接板五轴承连接,连接轴二与连接板g轴承连接,连接板五与设备安装板连接。
作为本技术方案的进一步优化,本发明一种塑料加工用塑料圆柱切割设备,所述的橡胶柱材质为高弹橡胶。
本发明一种塑料加工用塑料圆柱切割设备的有益效果为:
本发明一种塑料加工用塑料圆柱切割设备,设设备能够将塑料圆柱传送并将塑料圆柱旋转,设备能够在塑料圆柱传送旋转时将塑料圆柱切割成较短的圆柱,设备能够将较短的圆柱传送至收集箱里,设备能够将塑料圆柱切割成小球。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
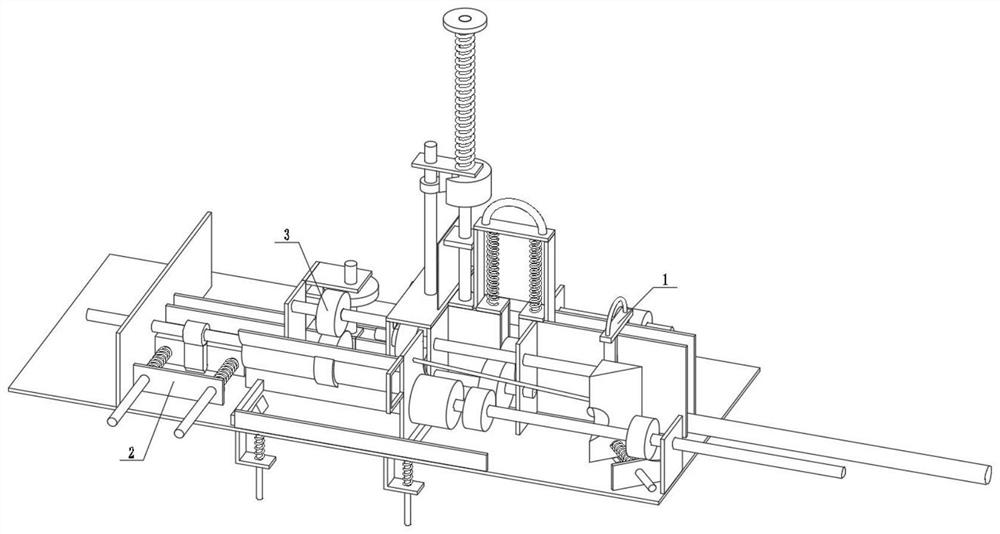
图1为本发明一种塑料加工用塑料圆柱切割设备的结构示意图。
图2为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图3为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图4为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图5为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图6为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图7为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图8为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图9为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图10为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图11为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图12为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图13为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图14为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图15为本发明一种塑料加工用塑料圆柱切割设备的的结构示意图。
图中:传送旋转联动机构1;复位柱1-1;复位连接块1-2;复位拉簧1-3;限位三角块1-4;限位条1-5;滑动板1-6;拉手1-7;电机滑动限位板1-8;电机1-9;电机轴1-10;摩擦轮1-11;连接板a1-12;连接轴a1-13;摩擦轮a1-14;连接板b1-15;摩擦轮b1-16;连接轴b1-17;连接板c1-18;限位弹簧1-19;连接板d1-20;拉手a1-21;连接板e1-22;连接板f1-23;小摩擦轮1-24;大摩擦轮1-25;连接轴c1-26;皮带1-27;连接轴d1-28;连接板g1-29;斜齿轮a1-30;斜齿轮b1-31;传送轮1-32;轴承圈1-33;轴承圈下连接块1-34;拉簧1-35;轴承圈上连接块1-36;连接板k1-37;拉手b1-38;设备安装板1-39;加工圆柱1-40;连接轴l1-41;连接板m1-42;间歇切割联动机构2;联动摩擦轮a2-1;传动轴a2-2;联动摩擦轮b2-3;轴承连接板2-4;异形摩擦轮2-5;传动轴b2-6;扭力弹簧2-7;安装板a2-8;安装板b2-9;切割刀2-10;安装板c2-11;切割刀限位条2-12;输出连接轮2-13;输出拨动块2-14;输出滑动块2-15;输出复位轴2-16;安装板d2-17;联动拉簧2-18;输出连接箱2-19;安装板e2-20;球型切割机构3;橡胶柱3-1;刹车块3-2;拉动柱3-3;刹车连接板3-4;刹车连接弹簧3-5;连接板一3-6;连接板二3-7;斜齿轮a3-8;连接轴一3-9;连接板三3-10;连接板四3-11;半圆刀3-12;旋转摩擦轮3-13;切割摩擦轮a3-14;斜齿轮b3-15;连接轴二3-16;连接板五3-17。
具体实施方式
具体实施方式一:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本发明涉及一种取样设备,更具体的说是一种塑料加工用塑料圆柱切割设备,包括传送旋转联动机构1、间歇切割联动机构2、球型切割机构3,设备能够将塑料圆柱传送并将塑料圆柱旋转,设备能够在塑料圆柱传送旋转时将塑料圆柱切割成较短的圆柱,设备能够将较短的圆柱传送至收集箱里,设备能够将塑料圆柱切割成小球。
传送旋转联动机构1与间歇切割联动机构2连接,间歇切割联动机构2与球型切割机构3连接,球型切割机构3与传送旋转联动机构1连接。
具体实施方式二:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的传送旋转联动机构1包括复位柱1-1、复位连接块1-2、复位拉簧1-3、限位三角块1-4、限位条1-5、滑动板1-6、拉手1-7、电机滑动限位板1-8、电机1-9、电机轴1-10、摩擦轮1-11、连接板a1-12、连接轴a1-13、摩擦轮a1-14、连接板b1-15、摩擦轮b1-16、连接轴b1-17、连接板c1-18、限位弹簧1-19、连接板d1-20、拉手a1-21、连接板e1-22、连接板f1-23、小摩擦轮1-24、大摩擦轮1-25、连接轴c1-26、皮带1-27、连接轴d1-28、连接板g1-29、斜齿轮a1-30、斜齿轮b1-31、传送轮1-32、轴承圈1-33、轴承圈下连接块1-34、拉簧1-35、轴承圈上连接块1-36、连接板k1-37、拉手b1-38、设备安装板1-39、加工圆柱1-40、连接轴l1-41、连接板m1-42,复位柱1-1与复位连接块1-2滑动连接,复位连接块1-2与设备安装板1-39连接,复位拉簧1-3套在复位柱1-1上且限位于复位连接块1-2与限位三角块1-4,限位三角块1-4与轴承圈下连接块1-34上的槽滑动连接,限位条1-5与设备安装板1-39连接,滑动板1-6与限位三角块1-4滑动连接,滑动板1-6与拉手1-7连接,滑动板1-6与电机滑动限位板1-8滑动连接,电机滑动限位板1-8与设备安装板1-39连接,电机1-9与滑动板1-6连接,电机1-9与电机轴1-10连接,电机轴1-10与摩擦轮1-11连接,电机轴1-10与连接板a1-12滑动连接,摩擦轮1-11与摩擦轮a1-14摩擦连接,连接板a1-12与设备安装板1-39连接,连接轴a1-13与摩擦轮a1-14连接,连接轴a1-13与小摩擦轮1-24连接,连接轴a1-13与连接板g1-29轴承连接,摩擦轮a1-14与摩擦轮b1-16摩擦连接,连接板b1-15与连接板e1-22连接,连接板b1-15与连接轴c1-26轴承连接,连接板b1-15与设备安装板1-39连接,连接板b1-15与连接板m1-42连接,摩擦轮b1-16与连接轴b1-17连接,摩擦轮b1-16与连接板e1-22滑动连接,连接轴b1-17与连接板c1-18轴承连接,连接板c1-18与连接板d1-20连接,连接板c1-18与连接板e1-22滑动连接,限位弹簧1-19一端与连接板d1-20连接另一端与连接板f1-23连接,连接板d1-20与拉手a1-21连接,连接板e1-22与轴承圈上连接块1-36滑动连接,连接板e1-22与设备安装板1-39连接,连接板e1-22上的槽与连接轴l1-41滑动连接,连接板f1-23与连接板e1-22连接,小摩擦轮1-24与大摩擦轮1-25摩擦连接,大摩擦轮1-25与连接轴c1-26连接,连接轴c1-26与连接板g1-29轴承连接,皮带1-27一端与连接轴c1-26摩擦连接,另一端与连接轴d1-28摩擦连接,连接轴d1-28与连接板g1-29轴承连接,连接轴d1-28与斜齿轮a1-30连接,连接板g1-29与设备安装板1-39连接,斜齿轮a1-30与斜齿轮b1-31相啮合,斜齿轮b1-31与连接轴l1-41连接,传送轮1-32与连接轴l1-41连接,轴承圈1-33与轴承圈下连接块1-34连接,轴承圈1-33与轴承圈上连接块1-36连接,轴承圈1-33与连接轴l1-41轴承连接,拉簧1-35一端与轴承圈下连接块1-34连接,另一端与设备安装板1-39连接,轴承圈上连接块1-36与连接板k1-37连接,连接板k1-37与拉手b1-38连接,设备安装板1-39与加工圆柱1-40滑动连接,设备能够将塑料圆柱传送并将塑料圆柱旋转,将塑料圆柱加工圆柱1-40放置在两个连接板e1-22之间,拉动拉手b1-38,拉手b1-38运通过连接板k1-37带动轴承圈上连接块1-36运动,轴承圈上连接块1-36运动通过轴承圈1-33带动连接轴l1-41运动,连接轴l1-41运动在连接板e1-22上槽的限制下带动传送轮1-32运动,此时推动加工圆柱1-40,使加工圆柱1-40受到传送轮1-32的压迫,传送轮1-32在轴承圈1-33与轴承圈下连接块1-34与拉簧1-35的作用下始终向下施加压力,拉动拉手a1-21,拉手a1-21运动通过连接板d1-20带动连接板c1-18运动,连接板c1-18运动通过连接轴b1-17带动摩擦轮b1-16运动,推动加工圆柱1-40,使加工圆柱1-40受到摩擦轮b1-16的压迫,在限位弹簧1-19的作用下加工圆柱1-40受到摩擦轮b1-16的压力,拉动拉手1-7,拉手1-7运动带动滑动板1-6向连接板a1-12方向运动,滑动板1-6运动带动电机1-9运动,电机1-9运动带动电机轴1-10运动,电机轴1-10运动带动摩擦轮1-11运动,当摩擦轮1-11运动至与摩擦轮a1-14接触时,滑动板1-6与靠近连接板a1-12一侧的限位条1-5接触,滑动板1-6受到同侧的三角块1-4限制,三角块1-4在复位拉簧1-3的作用下,保证了滑动板1-6相对位置稳定,电机滑动限位板1-8进一步的助益了滑动板1-6的相对位置稳定,电机1-9工作,电机1-9工作带动电机轴1-10旋转,电机轴1-10旋转带动摩擦轮1-11旋转,摩擦轮1-11旋转带动摩擦轮a1-14旋转,摩擦轮a1-14旋转带动连接轴a1-13旋转,摩擦轮a1-14旋转还带动摩擦轮b1-16旋转,摩擦轮b1-16旋转时将塑料圆柱加工圆柱1-40带动旋转,在连接轴a1-13旋转时还通过小摩擦轮1-24带动大摩擦轮1-25减速旋转,大摩擦轮1-25旋转带动连接轴c1-26旋转,连接轴c1-26旋转通过皮带1-27带动连接轴d1-28旋转,连接轴d1-28旋转带动斜齿轮a1-30旋转,斜齿轮a1-30旋转通过斜齿轮b1-31带动连接轴l1-41旋转,连接轴l1-41旋转带动传送轮1-32旋转,传送轮1-32旋转时将塑料圆柱向连接板g1-29方向传送。
具体实施方式三:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的间歇切割联动机构2包括联动摩擦轮a2-1、传动轴a2-2、联动摩擦轮b2-3、轴承连接板2-4、异形摩擦轮2-5、传动轴b2-6、扭力弹簧2-7、安装板a2-8、安装板b2-9、切割刀2-10、安装板c2-11、切割刀限位条2-12、输出连接轮2-13、输出拨动块2-14、输出滑动块2-15、输出复位轴2-16、安装板d2-17、联动拉簧2-18、输出连接箱2-19、安装板e2-20,联动摩擦轮a2-1与皮带1-27摩擦连接,联动摩擦轮a2-1与传动轴a2-2连接,传动轴a2-2与连接板m1-42轴承连接,传动轴a2-2与联动摩擦轮b2-3连接,传动轴a2-2与轴承连接板2-4轴承连接,联动摩擦轮b2-3与异形摩擦轮2-5摩擦连接,轴承连接板2-4与传动轴b2-6轴承连接,异形摩擦轮2-5与传动轴b2-6连接,传动轴b2-6与安装板a2-8连接,传动轴b2-6与安装板b2-9轴承连接,传动轴b2-6与安装板c2-11螺纹连接,扭力弹簧2-7套在传动轴b2-6上且限位于轴承连接板2-4与安装板a2-8,安装板b2-9与切割刀2-10连接,切割刀2-10与切割刀限位条2-12连接,切割刀2-10与连接板m1-42滑动连接,安装板c2-11与连接板e1-22连接,输出连接轮2-13与连接轴a1-13连接,输出连接轮2-13与输出拨动块2-14连接,输出滑动块2-15与输出拨动块2-14滑动连接,输出复位轴2-16与安装板d2-17滑动连接,安装板d2-17与设备安装板1-39连接,联动拉簧2-18套在输出复位轴2-16上且限位于输出滑动块2-15与安装板d2-17,输出连接箱2-19与设备安装板1-39连接,安装板e2-20与设备安装板1-39连接,安装板e2-20与输出滑动块2-15滑动连接,设备能够在塑料圆柱传送旋转时将塑料圆柱切割成较短的圆柱,在塑料圆柱传送旋转时,皮带1-27处于运动状态,皮带1-27运动带动联动摩擦轮a2-1旋转,联动摩擦轮a2-1旋转带动传动轴a2-2旋转,传动轴a2-2旋转带动联动摩擦轮b2-3旋转,联动摩擦轮b2-3旋转带动异形摩擦轮2-5旋转,异形摩擦轮2-5旋转带动传动轴b2-6旋转,传动轴b2-6旋转带动安装板a2-8旋转,异形摩擦轮2-5旋转时通过自身的物理特征在逆时针旋转时,旋转至异形摩擦轮2-5上的开槽与联动摩擦轮b2-3接触时,异形摩擦轮2-5在联动摩擦轮b2-3传导摩擦力惯性的作用下继续小距离的旋转,并在扭力弹簧2-7跟随安装板a2-8旋转时积蓄扭力,并在异形摩擦轮2-5上的开槽与联动摩擦轮b2-3接触时扭力瞬间释放,异形摩擦轮2-5瞬间复位,在传动轴b2-6旋转时在安装板c2-11的作用下向下运动,传动轴b2-6向下运动时扭力弹簧2-7同时积蓄弹力,进一步的助益了异形摩擦轮2-5的复位,传动轴b2-6向下运动还通过安装板b2-9带动切割刀2-10,当切割刀2-10接触到设备安装板1-39时,异形摩擦轮2-5开始复位,当异形摩擦轮2-5复位时切割刀2-10同步复位,此过程将传送过来的并旋转的加工圆柱1-40切割成短圆柱,并配合塑料圆柱加工圆柱1-40的传送与旋转,将剩余的塑料圆柱加工圆柱1-40切割成多个同等长度的短圆柱,设备能够将较短的圆柱传送至收集箱里,在塑料圆柱加工圆柱1-40被传送与旋转时,连接轴a1-13处于旋转状态,连接轴a1-13旋转带动输出连接轮2-13顺时针旋转,输出连接轮2-13旋转时带动输出拨动块2-14旋转,输出拨动块2-14旋转带动输出滑动块2-15向安装板e2-20拨动输出滑动块2-15,并在输出复位轴2-16与安装板d2-17与联动拉簧2-18的作用下,输出滑动块2-15可以实现复位,输出滑动块2-15先向安装板e2-20运动在复位,如此往复运动,经传送过来的较短的圆柱向输出连接箱2-19拨动。
具体实施方式四:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的球型切割机构3包括橡胶柱3-1、刹车块3-2、拉动柱3-3、刹车连接板3-4、刹车连接弹簧3-5、连接板一3-6、连接板二3-7、斜齿轮a3-8、连接轴一3-9、连接板三3-10、连接板四3-11、半圆刀3-12、旋转摩擦轮3-13、切割摩擦轮a3-14、斜齿轮b3-15、连接轴二3-16、连接板五3-17,橡胶柱3-1一端与滑动板1-6连接另一端与刹车块3-2连接,刹车块3-2与拉动柱3-3连接,拉动柱3-3与刹车连接板3-4滑动连接,刹车连接板3-4与设备安装板1-39连接,刹车连接弹簧3-5套在拉动柱3-3上且限位于刹车块3-2与刹车连接板3-4,连接板一3-6与安装板e2-20连接,连接板一3-6与连接板二3-7连接,连接板二3-7与连接轴一3-9轴承连接,斜齿轮a3-8与连接轴一3-9连接,斜齿轮a3-8与斜齿轮b3-15相啮合,连接轴一3-9与连接板三3-10螺纹连接,连接轴一3-9与连接板四3-11连接,连接板三3-10与安装板e2-20连接,连接板四3-11与半圆刀3-12连接,连接板四3-11与安装板e2-20滑动连接,半圆刀3-12与安装板e2-20滑动连接,旋转摩擦轮3-13与电机轴1-10连接,切割摩擦轮a3-14与连接轴a1-13连接,切割摩擦轮a3-14与斜齿轮b3-15摩擦连接,斜齿轮b3-15与连接轴二3-16连接,连接轴二3-16与连接板五3-17轴承连接,连接轴二3-16与连接板g1-29轴承连接,连接板五3-17与设备安装板1-39连接,设备能够将塑料圆柱切割成小球,拉动拉手1-7,拉手1-7运动带动滑动板1-6向远离连接板a1-12方向运动,滑动板1-6运动带动电机1-9运动,电机1-9运动带动电机轴1-10运动,电机轴1-10运动带动摩擦轮1-11,当摩擦轮1-11运动至与切割摩擦轮a3-14接触时,摩擦轮3-13运动至与摩擦轮b1-16接触,滑动板1-6与远离连接板a1-12一侧的限位条1-5接触,滑动板1-6受到同侧的三角块1-4限制,三角块1-4在复位拉簧1-3的作用下,保证了滑动板1-6相对位置稳定,电机滑动限位板1-8进一步的助益了滑动板1-6的相对位置稳定,在滑动板1-6运动时,滑动板1-6运动拉动动橡胶柱3-1,橡胶柱3-1拉动刹车块3-2向远离刹车连接板3-4的方向运动,并在拉动柱3-3与刹车连接板3-4与刹车连接弹簧3-5的作用下刹车块3-2可以自动复位,此时刹车块3-2被拉动至与连接轴c1-26与连接轴l1-41接触,并向连接轴c1-26与连接轴l1-41施加压力,使连接轴c1-26与连接轴l1-41受到传送不在旋转,此时小摩擦轮1-24与大摩擦轮1-25摩擦连接失效,电机1-9工作,电机1-9工作带动电机轴1-10旋转,电机轴1-10旋转带动摩擦轮3-13旋转,摩擦轮3-13旋转带动切割摩擦轮a3-14旋转,在切割摩擦轮a3-14旋转时摩擦轮b1-16被传动并处于旋转状态,此时塑料圆柱加工圆柱1-40处于旋转状态,电机1-9运动带动电机轴1-10运动,电机轴1-10运动带动摩擦轮1-11旋转,摩擦轮1-11旋转带动切割摩擦轮a3-14旋转,切割摩擦轮a3-14旋转带动斜齿轮b3-15旋转,斜齿轮b3-15旋转带动连接轴二3-16旋转,斜齿轮b3-15旋转时还带动斜齿轮a3-8旋转,斜齿轮a3-8旋转带动连接轴一3-9旋转,连接轴一3-9旋转在连接板三3-10的作用下向下运动,连接轴一3-9向下运动时通过连接板四3-11带动半圆刀3-12向下运动,半圆刀3-12向下运动时与正在旋转的塑料圆柱加工圆柱1-40切割成球体。
具体实施方式五:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15说明本实施方式,本实施方式对实施方式一作进一步说明,所述的橡胶柱3-1材质为高弹橡胶。
本设备的工作原理是:设备能够将塑料圆柱传送并将塑料圆柱旋转,将塑料圆柱加工圆柱1-40放置在两个连接板e1-22之间,拉动拉手b1-38,拉手b1-38运通过连接板k1-37带动轴承圈上连接块1-36运动,轴承圈上连接块1-36运动通过轴承圈1-33带动连接轴l1-41运动,连接轴l1-41运动在连接板e1-22上槽的限制下带动传送轮1-32运动,此时推动加工圆柱1-40,使加工圆柱1-40受到传送轮1-32的压迫,传送轮1-32在轴承圈1-33与轴承圈下连接块1-34与拉簧1-35的作用下始终向下施加压力,拉动拉手a1-21,拉手a1-21运动通过连接板d1-20带动连接板c1-18运动,连接板c1-18运动通过连接轴b1-17带动摩擦轮b1-16运动,推动加工圆柱1-40,使加工圆柱1-40受到摩擦轮b1-16的压迫,在限位弹簧1-19的作用下加工圆柱1-40受到摩擦轮b1-16的压力,拉动拉手1-7,拉手1-7运动带动滑动板1-6向连接板a1-12方向运动,滑动板1-6运动带动电机1-9运动,电机1-9运动带动电机轴1-10运动,电机轴1-10运动带动摩擦轮1-11运动,当摩擦轮1-11运动至与摩擦轮a1-14接触时,滑动板1-6与靠近连接板a1-12一侧的限位条1-5接触,滑动板1-6受到同侧的三角块1-4限制,三角块1-4在复位拉簧1-3的作用下,保证了滑动板1-6相对位置稳定,电机滑动限位板1-8进一步的助益了滑动板1-6的相对位置稳定,电机1-9工作,电机1-9工作带动电机轴1-10旋转,电机轴1-10旋转带动摩擦轮1-11旋转,摩擦轮1-11旋转带动摩擦轮a1-14旋转,摩擦轮a1-14旋转带动连接轴a1-13旋转,摩擦轮a1-14旋转还带动摩擦轮b1-16旋转,摩擦轮b1-16旋转时将塑料圆柱加工圆柱1-40带动旋转,在连接轴a1-13旋转时还通过小摩擦轮1-24带动大摩擦轮1-25减速旋转,大摩擦轮1-25旋转带动连接轴c1-26旋转,连接轴c1-26旋转通过皮带1-27带动连接轴d1-28旋转,连接轴d1-28旋转带动斜齿轮a1-30旋转,斜齿轮a1-30旋转通过斜齿轮b1-31带动连接轴l1-41旋转,连接轴l1-41旋转带动传送轮1-32旋转,传送轮1-32旋转时将塑料圆柱向连接板g1-29方向传送,设备能够在塑料圆柱传送旋转时将塑料圆柱切割成较短的圆柱,在塑料圆柱传送旋转时,皮带1-27处于运动状态,皮带1-27运动带动联动摩擦轮a2-1旋转,联动摩擦轮a2-1旋转带动传动轴a2-2旋转,传动轴a2-2旋转带动联动摩擦轮b2-3旋转,联动摩擦轮b2-3旋转带动异形摩擦轮2-5旋转,异形摩擦轮2-5旋转带动传动轴b2-6旋转,传动轴b2-6旋转带动安装板a2-8旋转,异形摩擦轮2-5旋转时通过自身的物理特征在逆时针旋转时,旋转至异形摩擦轮2-5上的开槽与联动摩擦轮b2-3接触时,异形摩擦轮2-5在联动摩擦轮b2-3传导摩擦力惯性的作用下继续小距离的旋转,并在扭力弹簧2-7跟随安装板a2-8旋转时积蓄扭力,并在异形摩擦轮2-5上的开槽与联动摩擦轮b2-3接触时扭力瞬间释放,异形摩擦轮2-5瞬间复位,在传动轴b2-6旋转时在安装板c2-11的作用下向下运动,传动轴b2-6向下运动时扭力弹簧2-7同时积蓄弹力,进一步的助益了异形摩擦轮2-5的复位,传动轴b2-6向下运动还通过安装板b2-9带动切割刀2-10,当切割刀2-10接触到设备安装板1-39时,异形摩擦轮2-5开始复位,当异形摩擦轮2-5复位时切割刀2-10同步复位,此过程将传送过来的并旋转的加工圆柱1-40切割成短圆柱,并配合塑料圆柱加工圆柱1-40的传送与旋转,将剩余的塑料圆柱加工圆柱1-40切割成多个同等长度的短圆柱,设备能够将较短的圆柱传送至收集箱里,在塑料圆柱加工圆柱1-40被传送与旋转时,连接轴a1-13处于旋转状态,连接轴a1-13旋转带动输出连接轮2-13顺时针旋转,输出连接轮2-13旋转时带动输出拨动块2-14旋转,输出拨动块2-14旋转带动输出滑动块2-15向安装板e2-20拨动输出滑动块2-15,并在输出复位轴2-16与安装板d2-17与联动拉簧2-18的作用下,输出滑动块2-15可以实现复位,输出滑动块2-15先向安装板e2-20运动在复位,如此往复运动,经传送过来的较短的圆柱向输出连接箱2-19拨动,设备能够将塑料圆柱切割成小球,拉动拉手1-7,拉手1-7运动带动滑动板1-6向远离连接板a1-12方向运动,滑动板1-6运动带动电机1-9运动,电机1-9运动带动电机轴1-10运动,电机轴1-10运动带动摩擦轮1-11,当摩擦轮1-11运动至与切割摩擦轮a3-14接触时,摩擦轮3-13运动至与摩擦轮b1-16接触,滑动板1-6与远离连接板a1-12一侧的限位条1-5接触,滑动板1-6受到同侧的三角块1-4限制,三角块1-4在复位拉簧1-3的作用下,保证了滑动板1-6相对位置稳定,电机滑动限位板1-8进一步的助益了滑动板1-6的相对位置稳定,在滑动板1-6运动时,滑动板1-6运动拉动动橡胶柱3-1,橡胶柱3-1拉动刹车块3-2向远离刹车连接板3-4的方向运动,并在拉动柱3-3与刹车连接板3-4与刹车连接弹簧3-5的作用下刹车块3-2可以自动复位,此时刹车块3-2被拉动至与连接轴c1-26与连接轴l1-41接触,并向连接轴c1-26与连接轴l1-41施加压力,使连接轴c1-26与连接轴l1-41受到传送不在旋转,此时小摩擦轮1-24与大摩擦轮1-25摩擦连接失效,电机1-9工作,电机1-9工作带动电机轴1-10旋转,电机轴1-10旋转带动摩擦轮3-13旋转,摩擦轮3-13旋转带动切割摩擦轮a3-14旋转,在切割摩擦轮a3-14旋转时摩擦轮b1-16被传动并处于旋转状态,此时塑料圆柱加工圆柱1-40处于旋转状态,电机1-9运动带动电机轴1-10运动,电机轴1-10运动带动摩擦轮1-11旋转,摩擦轮1-11旋转带动切割摩擦轮a3-14旋转,切割摩擦轮a3-14旋转带动斜齿轮b3-15旋转,斜齿轮b3-15旋转带动连接轴二3-16旋转,斜齿轮b3-15旋转时还带动斜齿轮a3-8旋转,斜齿轮a3-8旋转带动连接轴一3-9旋转,连接轴一3-9旋转在连接板三3-10的作用下向下运动,连接轴一3-9向下运动时通过连接板四3-11带动半圆刀3-12向下运动,半圆刀3-12向下运动时与正在旋转的塑料圆柱加工圆柱1-40切割成球体。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种塑料加工用塑料圆柱切割设备
- 一种固定效果好的塑料加工用切割设备