跨领域或环境中的任一者或组合的多任务应用程序的运行平台系统
文献发布时间:2023-06-19 10:32:14
相关申请的交叉引用
本申请要求于2018年7月23日提交的临时申请No.62/702,151的权益。
技术领域
本公开涉及由无人驾驶和有人驾驶的运载工具实现的广泛的工业,这些运载工具以机载、机外或协作方式实施广泛的自主或半自主控制方案,从而在空中领域、陆地领域、地下领域、室内领域、封闭领域、不规则领域、混合领域和海洋领域(这些领域具有任何恒定或动态的环境条件)中动态地适应行进。
本公开还涉及系统可扩展性和模块化能力,其创建了“运行系统(system ofplay)”,由此可实现制造灵活性、客户需求适应性和多市场采用。
本公开还涉及在空中领域、陆地领域、地下领域、室内领域、封闭领域、不规则领域、混合领域和海洋领域(这些领域具有任何恒定或动态的环境条件)中具有改进的稳定性和操作安全性的运载工具,该运载工具设置有用于通过动态地操纵(被动地和/或主动地)运载工具的特性而实时控制俯仰力矩、侧倾力矩、横摆力矩、或其组合中的任一者的多个动态控制机构,所述特性可以包括推力中心、与重心相关的推力中心的力矩臂、推力取向、运载工具的空气动力学中心、气流压力中心、和模具运载工具的重心、或其任意组合中的任一者。
另外,本公开涉及通用运载工具系统,该通用运载工具系统设计成主要或完全具有提升本体,该提升本体由多个互连的模块构成,所述多个互连的模块构造成形成升力产生本体(提升本体)的空气动力学可行轮廓,并且该通用运载工具系统包括中央模块、多个模块、以及多个推力矢量化模块,所述多个推力矢量化模块以可移位的方式连接至任何其他一个或多个现有模块并且操作性地联接至相应的推进机构。多个推力矢量化模块动态地移位(以倾斜和/或平移的方式),以根据需要引导和致动一个或多个推进机构,以在空中领域、陆地领域、地下领域、室内领域、封闭领域、不规则领域、混合领域和海洋领域(这些领域具有任何恒定或动态的环境条件)中在各种操作模式下安全且稳定地操作,以及在各种操作模式之间转换。
根据一个方面,本公开涉及用于不受损害的空中操作模式、陆地操作模式、地下操作模式、室内操作模式、封闭操作模式、不规则操作模式、海洋操作模式、或组合操作模式的通用运载工具,其中,安全或风险计算在上述各操作模式之间转换。通用运载工具包括主要升力产生本体、主要结构本体,或主要升力产生本体和主要结构本体两者,主要升力产生本体和主要结构本体由多个配合模块构成,各自构造成形成混合本体,并且具有空气动力学/流体力学可行轮廓、结构运载工具轮廓、或空气动力学/流体力学可行轮廓和结构运载工具轮廓两者。
本公开还涉及通用运载工具,该运载工具设计成具有在二维或三维空间中改变加速度、保持零加速度、增加加速度、或减小加速度(减速度)的推进能力,具有或不具有针对一个或更多个环境或领域的混合推进能力及其组合。此外,本发明的范围包括线性、角形、或组合/联接的加速度。
另外,本公开涉及无人驾驶或有人驾驶的运载工具,尤其涉及主要使用提升本体空气动力学或流体动力学来实现期望的操作状态同时实现竖向飞行操作模式、横向飞行操作模式、以及水平飞行操作模式之间在有或没有下述各者的辅助下以及在没有一个或多个协作外部定位系统、内部定位系统、全球定位系统、或其组合或没有来自一个或多个协作外部定位系统、内部定位系统、全球定位系统、或其组合的辅助下的无缝安全转换的运载工具,所述各者为:多个惯性测量单元、指南针、磁力计、引导和导航支持传感器、路径规划支持传感器、状态估计器、控制器、命令和控制架构、操作者/飞行员、低级算法、低级算法支持传感器、高级算法、高级算法支持传感器、人工智能、机载协同计算、非机载协同计算、应答器、碰撞避免、及其组合;迄今为止,先前列出的多个部件通常被包括但不限于作为运载工具的引导和导航系统的现有部件。
本公开还涉及利用形态学可变性,由此一维、二维或三维可操作性合并静止高度、平移和旋转/角动力学,使得当由引导和导航系统启用时,运载工具可以保持在竖向操作模式、横向操作模式和水平操作模式的任意组合中从任何角度如从负角度、零角度和正角度观察到的相对于水平线的任意选定或命令的本体迎角。
本公开还涉及利用形态学可变性,由此二维可操作性合并静止高度、平移和旋转/角动力学,使得当由引导和导航系统启用时,运载工具可以保持在竖向操作模式、横向操作模式和水平操作模式的任意组合中从任何角度如从负角度、零角度和正角度观察到的相对于水平线的任意选定或命令的本体迎角。
本公开还涉及利用形态可变性,由此在三维可操作性合并静止、平移和旋转/角动力学或二维可操作性合并静止、平移和旋转/角动力学中,使得当由引导和导航系统启用时,运载工具通过生成其自身的力、操纵外力、利用重力、或其任意组合来推进其自身,以在平移或角运动的任意组合中加速或减速。
本公开还涉及通用运载工具,该通用运载工具具有空气动力学和/或矢量化推进质量,从而允许运载工具以短跑道(或没有跑道)、高运载工具密度和高吞吐量来运行。
背景技术
能够竖向飞行和水平飞行的飞行器通常被分类为VTOL(Vertical Take-off andLandin,竖向起飞和着陆)、STOL(Short Take-off and Landin,短起飞和着陆)、STOVL(Short Take-off and Vertical Landin,短起飞和竖向着陆)、VTOSL(Vertical Take-offand Short Landin,竖向起飞和短着陆)或V/STOL(Vertical and/or Short Take-ff andLanding,竖向起飞和/或短起飞和着陆)平台。这些飞行器通常不能够在起飞飞行状态与着陆飞行状态之间的转换期间使用空气动力升力。此外,这些设计本质上着眼于平衡悬停飞行与向前飞行之间的权衡;因此,实现多领域和多环境可操作性的属性和功能很少被认为是内置设计意图的一部分。相反,就多领域和微环境适用性而言,更可能的是,过去的直升机状和飞机状混合动力减小了其发明的操作广度。
美国专利No.005823468A、美国专利No.2011001020A1、美国专利No.20130105635A1、国际专利No.2018071970A1和美国专利No.20160114887A1描述了具有不同形式的推力矢量化的飞行器。然而,这些专利没有解决多轴启用的运动与多方向倾斜致动和空气动力升力产生的系统范围的混合。附加地,这些专利在子系统模块化、多域适用性和多环境可操作性方面存在缺陷。
VTOL飞行器有时设计成带有倾斜机翼、倾斜旋翼,或者包括临时安装在固定翼飞行器上的类似多旋翼的推进装置。然而,这些运载工具具有由于损害了基于空气动力学的飞行(飞机的飞行模式)和动力升力(直升飞机的飞行模式)而导致的缺点。一方面,对有效空气动力升力的要求通常来自大的有效升力产生表面积以及前进速度。另一方面,在运载工具的地面速度为零的悬停飞行操作模式中,整个升力产生由动力升力系统产生。使用翼状结构的运载工具需要大的操作占地面积,而那些直接利用旋翼进行动力升力的运载工具则具有向前飞行速度和有限的有效载荷能力。
本公开的范围组合了最佳属性,使得不仅实现了可扩展和模块化的多样化操作能力,而且在任务适用性、环境和领域适用性、以及市场适应性方面实现了多样性。
主要升力产生本体经由空气动力学/流体动力学效应或结构框架本体与推力矢量化的整体融合允许显著的子系统整合和模块化,并且提供了对许多行业中的最终用户高度有吸引力的宽操作范围,包括但不限于无人驾驶自主系统行业、城市移动性行业、国防行业和载人航空行业。
发明内容
本发明的一个目的是提供一种具有增强的操作包络的多领域高级航空运载工具,其通过将不受损害且平衡的操作的有效V/STQL能力引入具有可选的或预安装的附加操作模式或其组合的飞机操作模式和直升机操作模式中以及通过引入飞机操作模式与直升机操作模式之间的安全转换,以用于陆地领域、地下领域、室内领域、封闭领域、不规则领域、混合领域和海洋领域,具有任何恒定或动态的环境条件。因此,在与“运行系统”主题相关的本发明的范围内,一些实施方式可以完全从空中领域转移,并且仅在上面列出的领域的其他后续组合中操作。
根据一个实施方式,一个或更多个提升本体模块可以以可移除且可移位的方式彼此连接以形成模块化提升本体。提升本体的配合模块包括:至少一个推力矢量化模块和操作性地联接至推力矢量化模块的至少一个推进机构。推力矢量化模块配置成被动态地控制以影响推进机构的定位和致动,从而实现运载工具的定位和操作模式的动态(基本上实时)控制,并实现在运载工具的操作模式之间的转换。
根据一个实施方式,至少一个(或多个)推力矢量化模块可以包括倾斜舱模块,该倾斜舱模块在其上承载推进机构并且能够围绕从可选的升力产生主体和/或其配合模块延伸的轴线以旋转的方式移位。
本发明的另一目的是提供一种能够短起飞、短着陆、竖向起飞和/或竖向着陆的飞行器,该飞行器是紧凑的、易于制造、能够持续竖向飞行和水平飞行、能够在竖向飞行状态与水平飞行状态之间以任何顺序悬停以及高效且安全地转换、能够从固定平台和/或移动平台发射,这与起飞和/或着陆期间使用的发射/着陆区表面质量和/或地面类型无关。
本发明的另一目的是提供一种能够V/STOL的飞行器,其基于将升力本体概念与推力矢量化相结合,同时解决飞行模式转换期间的倾转翼和倾转旋翼缺陷,并且基本上以至少以下方式实现:(a)通过收获提升本体的益处以在大迎角下产生生理并且实现有利的失速性能,同时使升力面积最大化以为运载工具提供有用的升力,以及(b)通过减轻由于提升本体在过渡期间的可用升力而针对推进系统的要求,即使在大角度下亦是如此。因此,主题系统设计成利用较小的螺旋桨系统或大直径叶片系统实现持续的竖向飞行和安全过渡。
本发明的另一目的是增强运载工具的飞行包络(flight envelop),使得其可以保持从负角度、零角度和正角度的任何视角观察到的相对于水平线的任何选定或命令的本体迎角。因此,本发明是其自己的平移和倾斜系统,使得独立的万向支架致动器大部分是冗余的或过时的。此外,大范围的迎角操纵允许运载工具避开前或后、左或右、以及顶部或底部的传统定义。
本发明的另一目的是在飞行状态转变期间实现主题运载工具的升力产生,这导致推进系统的较少功耗/消耗,从而有益于运载工具范围、飞行包络、总体性能、运载工具重量、允许的任务类型、机载电子设备和/或推进系统。
本发明的另一目的是实现运载工具的大部分升力产生本体、大部分结构本体、或混合本体与一个或更多个通用模块的相当大程度的物理模块混合,所述一个或更多个通用模块中的一些通用模块与推进矢量化设备共享专门的功能,推进矢量化设备本身可以另外用作着陆机构/设备的部件,同时还引入用于驾乘高度变化性或捏合(kneeling)能力的致动。因此,当运载工具处于静止、平移、旋转、或其组合时,运载工具相对于表面或地面的姿态是可变的。物理模块杂交的集合结果是一个或更多个配合模块的运行或互连的系统。
除了推进矢量化设备、平铺致动和着陆设备的配合性质之外,本发明的另一目的是提供二维(非空运)运动的各种附加模式。这些实施方式可以例如但不限于借助于使一个或更多个推进模块致动或旋转同时可选地从安装的推进系统提供净矢量化推进力来使其自身向前、向后、转弯、爬升和旋转就位。
在替代操作中,如果矢量化或非矢量化净推进力包括一个或多个基于轮的驱动器,则这些实施方式主要支持类似于坦克的转向和操纵。替代性地,如果仅利用一个或多个推进矢量化设备的倾斜致动(例如,没有与周围流体的动量交换用于推进目的,而空气也被认为是流体),则该实施的系统可以例如但不限于爬行、行走、跳跃、跳过、滑动、抓握或浮动。
根据一个实施方式,物理配合模块可以设计成具有轻巧的配合本体表面和/或结构,比如但不限于利用在增材制造中使用的材料,该材料在以可移位的方式彼此连接时在其之间限定内部容积。运载工具本体可以包括中央模块、多个其他配合模块、和多个推进舱模块,所述多个推进舱模块可以刚性地或非刚性地附接。推进舱模块可以以可移位的方式(例如,以旋转的方式或以平移的方式)设置在中央模块或配合模块的每一侧处,以用于推进机构在受控方向上的对称或不对称致动。
根据一个实施方式,内部容积可以设计成以其组合分隔例如多个子系统,所述多个子系统包括但不限于航空电子系统、感测系统、武器系统、引导和导航系统、协同计算板系统、通信系统、动力系统、储能系统、有效载荷系统、推进系统、燃料电池系统、起落架系统、对接系统、系绳系统、飞行辅助系统、防撞系统、减速系统、飞行终止系统、压载系统、浮力系统、机械致动系统、电子系统和被动系统。
根据一个实施方式,至少一个马达可以定位在限定于提升本体模块或结构本体模块中的任一者中的内部隔室中。例如,马达可以位于舱模块内并且操作性地联接至推进机构。
根据一个实施方式,推进机构可以被动态地控制以便以相对于另一推进机构的反向旋转状态操作,以用于在具有相反涡流场的大部分升力产生本体或结构本体模块上产生气流。
根据一个实施方式,受一个或多个推力矢量化模块影响的操作模式可以包括短起飞、短着陆、常规起飞、常规着陆、外部辅助起飞、外部辅助着陆、及其组合。一个或多个推力矢量化模块还配置成通过对侧倾力矩、俯仰力矩和横摆力矩及其组合进行控制来控制运载工具的横向定位、纵向定位或竖向定位及其组合。
根据一个实施方式,推力矢量化模块构造成沿顺时针方向和逆时针方向旋转,其中,每个推力矢量化模块的推进机构构造成沿任何方向旋转。推力矢量化模块的推进机构可以操作为推动器、牵引器或其组合。
另一实施方式是一种对通用运载工具进行操作以使其在空中领域、陆地领域、地下领域、室内领域、封闭领域、不规则领域、混合领域和海洋领域中行进的方法(这些领域具有任何恒定或动态的环境条件),该通用运载工具处于各种操作模式,安全或风险计算在上述各操作模式之间转换。
根据一个实施方式,主题方法可以包括以下步骤:
将主要升力产生本体、结构本体、或混合本体配置成具有一个或更多个配合模块,所述一个或更多个配合模块具有或不具有用以产生基本上空气动力学轮廓的升力本体的轮廓形状,
将一个或多个物理配合模块配置成具有外部区室化、外部部件、内部区室化、或其组合,
将一个或多个物理配合模块选择性地配置成具有推力矢量能力,从而形成与至少一个推进装置操作性地联接的推力矢量化模块,以及
控制推力矢量化模块以影响所述一个或多个推进装置的定位和致动,进而动态地控制运载工具的操作模式并控制在操作模式之间的转换。
根据另一实施方式,主题方法还可以包括以下步骤:将运载工具操作处于竖向飞行、向前飞行、站上飞行、慢速飞行、悬停飞行、及其组合中的任一飞行,由此如从一个或多个视角观察到的运载工具相对于水平线的迎角被命令、预选、硬安装(hard-installed)、动态可选、或其组合。
根据另一实施方式,主题方法还可以包括以下步骤:将运载工具操作处于竖向飞行、向前飞行、站上飞行、慢速飞行、悬停飞行、及其组合中的任一飞行,由此如从一个或多个视角观察到的一个或多个推力矢量化模块相对于水平线的迎角被命令、预选、手动安装、动态可选、或其组合。
根据另一实施方式,主题方法还可以包括以下步骤:将运载工具操作处于竖向飞行、向前飞行、站上飞行、慢速飞行、悬停飞行、及其组合中的任一飞行,由此如从一个或多个视角观察到的由运载工具及其一个或更多个配合模块创建的相对的一个或多个角度被命令、预选、硬安装、动态可选、或其组合。
根据另一实施方式,主题方法还可以包括以下步骤:将运载工具操作处于竖向起飞、竖向着陆、非零速度起飞、非零速度着陆、及其组合中的任一者,由此如从一个或更多个视角观察到的运载工具相对于水平线的迎角被命令、预选、硬安装、动态可选、或其组合。
根据另一实施方式,主题方法还可以包括以下步骤:将运载工具操作处于竖向起飞、竖向着陆、非零速度起飞、非零速度着陆、及其组合中的任一者,由此如从一个或多个视角观察到的一个或多个推力矢量化模块相对于水平线的迎角被命令、预选、硬安装、动态可选、或其组合。
根据另一实施方式,主题方法还可以包括以下步骤:将运载工具操作处于竖向起飞、竖向着陆、非零速度起飞、非零速度着陆、及其组合中的任一者,由此如从一个或多个视角观察到的由运载工具及其一个或更多个配合模块创建的相对的一个或多个角度被命令、预选、硬安装、动态可选、或其组合。
根据另一实施方式,主题方法还可以包括以下步骤:将一个或多个推进装置联接至一个或多个推力矢量化模块,以用于在飞行中推进运载工具、在地面上推进运载工具、在流体介质上推进运载工具、在流体介质中推进运载工具、及其组合;将一个或多个编程算法、逻辑、数据结构或其组合联接,并且对飞行中的、地面上的、流体介质上的、流体介质中的、及其组合的运载工具进行路径规划;以及将一个或多个引导和导航系统联接至运载工具,并且将运载工具导航处于飞行中、地面上、流体介质上、流体介质中、及其组合;将一个或多个引导和导航系统联接至运载工具,并且控制飞行中的、地面上的、流体介质上的、流体介质中、及其组合的运载工具;将一个或多个引导和导航系统联接至运载工具,以及使运载工具在飞行中、在地面上、在流体介质上、在流体介质中、或其组合中稳定。
根据另一实施方式,该方法还包括:将一个或多个推力矢量化模块配置为多功能致动的推力模块;用至少一个多功能升力产生本体模块、至少一个多功能本体模块配置提升本体;在至少一个多功能推力模块的内部或外部安装至少一个部件;其中选自部件的至少一个部件包括选自包括下述各者的组的部件,所述各者为:有效载荷、武器化、对抗系统、通信系统、压载系统、感测系统、悬架系统、制动系统、阻尼系统、气囊、着陆伞、减速设备、驱动设备、转向设备、振动设备、起落架设备、充电设备、放电设备、电磁体装置、飞行辅助装置、运动辅助装置、机动辅助装置、具有或不具有与相应的对接基部电连接的对接设备、系绳、锚固装置、夹持装置、抓取装置、爪装置、浮动装置、取回装置、捕获装置、引导和导航系统、及其组合。
根据另一实施方式,该方法还包括:在损耗减轻操作模式中操作运载工具,以减少对运载工具的模块的损坏。损耗减轻操作模式由选自包括下述各者的组的机构触发,所述各者为飞行员触发、自主飞行员触发、观察者触发、传感器触发、减速触发、加速触发、雷达触发、应答器触发、交通控制器触发、碰撞触发、相对位置触发、人工智能触发、及其组合。
根据另一实施方式,该方法还包括:将运载工具操作处于由选自包括下述各者的组的机构触发的飞行终止模式,所述各者为飞行员触发、自主飞行员触发、观察者触发、传感器触发、减速触发、加速触发、雷达触发、应答器触发、交通控制器触发、撞击触发、相对位置触发、人工智能触发、及其组合。
根据另一实施方式,该方法还包括以下步骤:向一个或多个本体模块、一个或多个升力产生本体模块、一个或多个推进模块、一个或多个结构模块、或其组合施加打样处理。打样处理可以选自包括下述各者的组,所述各者为防弹、防碎裂、防爆、耐热、防火、检测打样、隔音、砂打样、电磁打样、导电打样、防晒、紧密打样、防水、防潮、防辐射、或其组合。
根据另一实施方式,该方法还包括以下步骤:使基本上用作感测设备、操纵设备、或感测设备和操纵设备两者的部件的传统万向支架致动的部署过时,或者使基本上用作感测设备、操纵设备的部件的传统万向支架致动的部署冗余。
根据另一实施方式,主题方法还包括:通过经由平移和/或旋转和/或内部和/或外部质量块的振动而沿着横向轴线、纵向轴线、或横向轴线和纵向轴线来操纵运载工具的重心进而来控制运载工具的稳定性。
在上述方法中,特别是当利用源自增材制造的制备技术时,一个或多个物理配合模块制造可以包含增材制造设计和制造过程基本上固有的内部压印图案化、外部压印图案化、或直通压印图案化,使得包括但不限于基于感测、基于视觉、基于张量流、基于人工智能、或以组合方式的算法可以识别一个或多个其他运载工具的存在,同时识别来自下述各者的朋友,所述各者为运载工具角色、运载工具真实性、运载工具配置、运载工具状态、运载工具遇险、运载工具通信、运载工具管理机构、或其组合。这样的压印图案化可以进一步由照明技术辅助,以便允许白天或夜间识别这样的图案化集合。类似地,安装在环境中的压印图案可以传达属性或唯一识别标记,以便在运载工具的任务过程中帮助运载工具。
在上述方法中,一个或多个推进装置选自包括但不限于螺旋桨、涡轮机、推进器、风扇和火箭的组,这些部件能够在气体介质或流体介质中利用燃烧、辉光、电、热点、独立的、基于燃料电池的、混合的、泵、齿轮传动的推进机构来加速,并且被安装在内部、外部、其组合,并且被刚性地附接、致动、或其组合,以控制运载工具平移、旋转、侧倾力矩、俯仰力矩和横摆力矩、及其组合
在上述方法中,一个或多个引导和导航系统选自包括下述各者但不限于下述各者的组,所述各者为:惯性测量单元、指南针、磁力计、引导和导航支持传感器、路径规划支持传感器、状态估计器、控制器、命令和控制架构、操作者/飞行员、低级算法支持传感器、高级算法、高级算法支持传感器、人工智能、机载协作计算、非机载协同计算、应答器、碰撞避免、及其组合;而没有一个或更多个配合外部定位系统、内部定位系统、全球定位系统、或其组合或者没有来自一个或更多个配合外部定位系统、内部定位系统、全球定位系统、或其组合的辅助。
从本申请中包含的进一步详细描述和附图中,本公开中描述的设计和方法的这些及其他目的和优点将是明显的。
附图说明
以下附图示出了本文公开的本发明的各实施方式的各种部件的示例,并且仅出于说明的目的。在所附附图的图中通过示例而非限制的方式示出了本发明的各实施方式,并且在附图中:
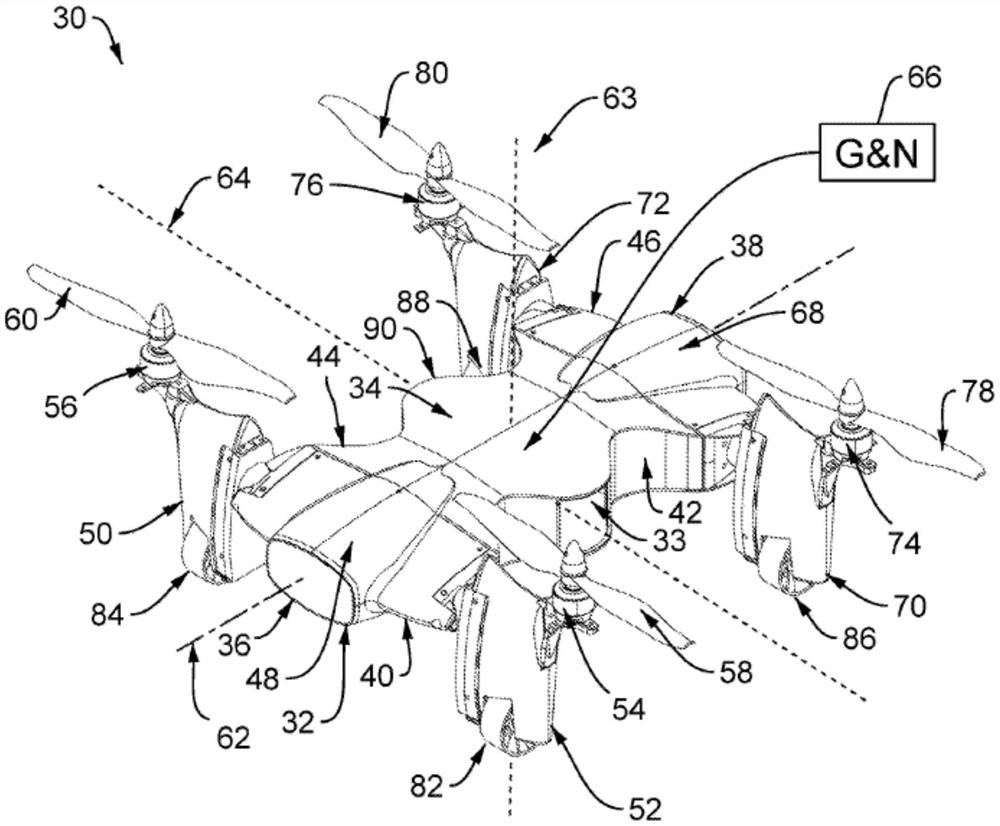
图1A示出了运载工具系统的一个实施方式的立体图,其中,推力矢量化模块搁置处于部署就绪位置;
图1B至图1E示出了运载工具系统的一个实施方式的立体图,其中,推力矢量化模块被致动;
图2A示出了运载工具系统的一个实施方式的侧视图,其示出了当处于基本上悬停飞行中时的飞行转换期间的运载工具迎角取向序列的一个示例,在基本上悬停飞行中使得运载工具迁移到水平和竖向取向以及从水平和竖向取向迁移回;
图2B示出了运载工具系统的一个实施方式的侧视图,其示出了当处于基本上非悬停飞行中时的飞行转换期间,运载工具迎角取向序列的一个示例,在基本上非悬停飞行中,存在平移速度矢量,使得运载工具可互换地迁移到水平和竖向取向以及从水平和竖向取向迁移回;
图2C示出了运载工具系统的一个实施方式的侧视图,其示出了在起飞和着陆程序范围内的飞行转换期间,运载工具迎角取向序列的一个示例;
图2D和图2E示出了在大部分竖向飞行中利用推力矢量进行平移的运载工具系统的一个实施方式的侧视图;
图2F和图2G示出了在大部分竖向飞行中利用推力矢量进行组合的平移和旋转的运载工具系统的一个实施方式的侧视图;
图2H示出了在大部分竖向飞行中利用推力矢量进行旋转的运载工具系统的一个实施方式的侧视图;
图3A示出了运载工具系统的一个实施方式的侧视图,其示出了倾斜致动的推力矢量化模块序列的一个示例,该倾斜致动的推力矢量化模块序列在运载工具保持选择的或命令的迎角时其迎角取向产生平移飞行路径;
图3B示出了运载工具系统的一个实施方式的侧视图,其示出了倾斜致动的推力矢量化模块序列的一个示例,该倾斜致动的推力矢量化模块序列在运载工具保持选择的或命令的迎角时其迎角取向产生交替的(反向的)基本上平移的飞行路径;
图4A至图4E示出了运载工具系统的一个实施方式的俯视图,其详述了从图4A所示的非悬停飞行转换至图4B至图4E所示的通过旋转或带有平移位移分量的旋转来进一步控制的飞行模式的一个示例;
图5A至图5D示出了运载工具系统的一个实施方式的侧视图,其示出了推力矢量化模块的一致倾斜致动用以操纵相对于表面的驾乘高度的一个示例;
图5E示出了运载工具系统的一个实施方式的侧视图,其示出了推力矢量化模块的独立倾斜致动用以操纵相对于表面的驾乘高度和驾乘角的一个示例;
图5F示出了运载工具系统的一个实施方式的正视图,其示出了推力矢量化模块的独立倾斜致动用以操纵相对于表面的驾乘高度和倾斜角两者的一个示例;
图6示出了运载工具系统的一个实施方式的侧视图,其示出了推力矢量化模块在滚动起飞滑跑的辅助下的倾斜致动的一个示例;
图7A和图7B示出了运载工具系统的一个实施方式的侧视图,其示出了推力矢量化模块的倾斜致动的一个示例,该推力矢量化模块辅助飞行模式转换同时进一步由空气动力升力辅助。
图8A、图8B和图8C示出了由配合模块的即插即用能力实现的多功能运行系统的实施方式;
图9A至图9D示出了以组合方式示出推力矢量化模块的多功能性,例如适于主要利用流体加速机动机构的地面适用性,的实施方式;
图10A至图10D示出了以组合方式示出推力矢量化模块的多功能性同时将本主题运载工具的实施方式转换为非航空应用(例如适于利用主驱动和辅助驱动型机动机构的多地面适用性)的实施方式;
图11A至图11D示出了以组合方式示出模块化推力矢量化模块的多功能性同时将本主题运载工具的实施方式转换为非越野应用(例如适于利用驱动型机构和延伸机构的多地面适用性)的实施方式;
图12A至图12D示出了运载工具系统转换为非航空应用且详述了具有各种安装的延伸机构构型的模块化推力矢量化模块的多功能性的实施方式的等轴图;
图13A至图13C示出了示出分散在整个运载工具系统中的已安装感测封装件的示例的实施方式;
图14A至图14E示出了构造成容纳具有各种功能的支承部件的示例性本体模块;
图15A示出了提升本体模块的一个实施方式的俯视图,其中,其他支承模块与具有截面切口的其他支承模块隔离,该截面切口的剖视图(图15B)示出了存在一个或多个结构部件,具有或不具有设计的失效模式,同时另外基本上形成一个或多个内部隔室;
图16A单独地示出了本体模块的一个实施方式的俯视图,同时示出了附属结构,该附属结构在图16B和图16C中详述并且具有可触及的安装特征(例如可以还包括设计的故障点);
图17A和图17B分别示出了具有压印特征或标记的运载工具系统的实施方式的俯视图和仰视图;
图18A至图18C分别示出了运载工具系统的一个实施方式的等轴图、正视图和侧视图,该运载工具系统转换为非航空操作性,并且示出了具有航海能力的模块化推力矢量化模块的多功能性的一个示例;
图19A和19B分别示出了转换为非空中可操作性的运载工具系统的一个实施方式的等轴图和侧视图,其示出了具有基本未淹没或浮力能力的模块化推力矢量化模块的多功能性的一个示例;
图20A至图20C示出了运载工具系统的一个实施方式的俯视图,该运载工具系统在例如大部分受限空间中的碰撞避免响应的辅助下利用推力矢量化模块的基本横向移位;
图21示出了利用系留(tethered)系统/布置的运载工具系统的一个实施方式;
图22A示出了运载工具系统的一个实施方式,该运载工具系统适于运载例如人或动物的物品,另外由倾斜致动的推力矢量化模块支承以如图22B所示简化装载/卸载以及如图22C所示与快速装载设备配合工作;
图23示出了本公开的实现适航性的系统架构实施方式的顶层功能框图;
图24示出了运载工具的一个实施方式;以及
图25示出了本体部段的一个实施方式。
具体实施方式
在本运载工具设计中,运载工具的有效性和通用性在导出模块化启用的运行系统30时至少由运载工具的子系统及其交叉功能的组合集成产生。主题系统的设计和操作的基本概念不限于使用具有专门专用功能的子系统,而是能够使用多个功能系统。例如,所公开的实施方式中的一些实施方式将推力矢量化模块与起落架和/或有效载荷隔室组合,本体模块用于辅助升力产生和航空电子设备/有效载荷区室化,推力矢量化模块用于指导在空中操作模式和非空中操作模式下的机动努力,同时另外用作着陆设备,等等。
本公开的飞行器,特别是用作无人航空系统(Unmanned Aerial System,UAS),可以用于满足各种最终用户需求,比如但不限于安全监测、危机缓解、救灾、科学感测、用于研究和开发其他子系统的传感平台、运输、有效载荷递送、通信、搜索和救援以及许多其他任务。
以下描述呈现了具有作为示例详述的无人驾驶飞行器系统的主题系统的实施方式。然而,本发明也可以应用于有人的(载人的)飞行器/运载工具。附图不一定按比例示出,并且一些特征可以示出为比它们相对于其他特征更大或更小,以便于对其的说明。
在图1A中示出了运行基础模型系统30的的一个示例。系统30示出为处于具有完全固定构型的状态(例如,其中所有物理本体模块相对于彼此不可移位并且在制造期间根据主题设计进行组装,然而,通过设计进行模块化)。运行基础模型系统30还包括各种一个或多个支持系统的重新配置、重新定向和/或致动状态,从而进一步允许新的任务适用性、可扩展性和/或产品市场适合性,如本文进一步论述的。
虽然仅作为示例,本文描述了推进装置中的特定类型,但是在主题系统中设想的推进设备还可以包括螺旋桨、涡轮机、风扇或其他动量交换装置,这些部件以多个或成对存在或作为单个单元存在,具有适用的任何叶片数,具有或不具有反向旋转、居中或偏移,具有任何直径和/或物理属性和/或尺寸,具有本体和/或容装件和/或模块,并且/或者是梢端安装的,固定安装的和/或被允许以致动,是串联和/或并联安装的,是对称或不对称安装的,并且/或者构造为牵引器和/或推动器。
此外,推进装置可以能够展开、收起、折叠、俯仰/侧倾/横摆控制、推力控制等。
虽然仅作为示例描述了辅助机动装置中的特定样式,但是在主题系统中设想的辅助机动装置还可以包括轨道、凸缘轮、跟踪轮、辊、滑板、螺纹、支脚、垫、弹簧启用装置、能量启用装置等。
虽然仅作为示例,本文描述了具有配合模块的特定轮廓的本体形状产生了部分或基本上升力产生运载工具,但是物理本体模块可以替代地由具有最小空气动力学/流体动力学值至不具有空气动力学/流体动力学值的结构部件构成,或者由混合的结构和升力产生模块构成,从而针对可制造性、可负担性、可接近性、可运输性、可扩展性、适应性、模块性、任务迁移需求或其组合创建权衡驱动的方法。
对于下面的所有附图,在捕获实现各种操纵的定向的、平移的和旋转变化的某些方面的同时,系统30始终保持沿着并围绕所有运载工具32轴线的稳定性和可控性。
图1A示出了系统30的一个实施方式的等轴图。在该实施方式中,运载工具32包括提升本体模块34,该提升本体模块34包括前本体部段(模块)36和后本体部段(模块)38,前本体部段(模块)36和后本体部段(模块)38优选地以形成将前向边缘/表面40连接至横向边缘/表面(分别为左边缘/表面42和右边缘/表面44)通向后向边缘/表面46的大致空气动力学/流体动力学形状的方式成形。轮廓90提供空气动力学特性、流体动力学特性、结构支承/刚性、或其组合,并且可以被应用以形成从一个或更多个视角观察到的简单和/或复杂的曲率,具有或不具有一个或多个正交关系。轮廓90可以另外构造成:生成部件整流罩、开口、安装件,提供冷却特征,实现围绕本体的推进流动,使围绕本体的流动畅通,并且使围绕本体的感官视野畅通等。
提升本体模块34可以设计有多个基本上提升本体模块、最低限度提升结构本体模块、或混合提升和结构本体模块。前本体部段36和后本体部段38可以以大体上与模具提升本体模块34协作的方式可移位地连接。多个其他本体模块可以通过在提升本体模块34的任何取向和位置上的任何剖切面或剖切曲率来创建,由此它们的独立和聚合功能通常是用户定义的。此外,多个其他本体模块可以被附接或移除,由此它们的独立和聚合功能通常连同期望数量的一个或多个可访问性端口33一起被用户定义。
系统30包括一个或多个右前推进设备50和一个或多个左前推进设备52,并且可以包括或不包括一个或多个前定位部段/模块48。系统30还包括驱动其相应的推进装置,即,左螺旋桨58和右螺旋桨60,的一个或多个左马达54和一个或多个右马达58。虽然在本文中前向推进系统在外部示出,但是至少一个马达可以定位在限定于任何提升本体模块中的内部隔室中。例如,一个或多个马达可以(完全地或部分地)位于推进设备内部并且操作性地联接至推进机构。
系统30包括一个或多个左前推进设备52和一个或多个右前推进设备50,所述一个或多个左前推进设备52具有驱动一个或多个推进装置(如图所示的螺旋桨58)的一个或多个马达54,所述一个或多个右前推进设备50具有驱动一个或多个推进装置(如图所示的螺旋桨60)的一个或多个马达56,并且同时可选地包括一个或多个向前定位的本体部段/模块36。虽然在本文中后向推进系统在外部示出,但是一个或多个马达可以定位在限定于任何提升本体模块中的内部隔室中。例如,马达可以(完全地或部分地)位于推进设备内部并且操作性地联接至推进机构。
系统30包括一个或多个左后推进设备70和一个或多个右后推进设备72,所述一个或多个左后推进设备70具有驱动一个或多个推进装置(如图所示的螺旋桨78)的一个或多个马达74,所述一个或多个右后推进设备72具有驱动一个或多个推进装置(如图所示的螺旋桨80)的一个或多个马达76,并且同时可选地包括一个或多个向后定位的本体部段/模块38。虽然在本文中后向推进系统在外部示出,但是一个或多个马达可以定位在限定于任何提升本体模块中的内部隔室中。例如,马达可以位于推进设备内部并且操作性地联接至推进机构。
系统30还可以包括配备到一个或多个配合推进设备上的辅助机动启用装置82、84、88、90。例如,分别附接至左前推进设备50、右前推进设备52、左后推进设备70和右后推进设备72的是左前机动启用装置82、右前机动启用装置84、左后机动启用装置88和右后辅助机动启用装置90。
进一步限定的是,当任何一个或多个配备的推进设备另外配备有/驱动有一个或多个倾斜致动机构时,机械驱动系统允许围绕一个或多个轴线的倾斜位移,从而产生一个或多个自由度,然后其形成如本文所提及的“推力矢量化模块”。此外,本推进设备的收集、一个或多个本推力矢量化模块的收集或多个本推进设备和推力矢量化模块的收集的总体机动效果被定义为如本文所提及的“净机动系统”。进一步定义的是,术语“运动”和“机动”通常涉及空间变化,所述空间变化通常从平移、旋转、角度、大部分稳定、大部分稳定化或其组合效应的变化导出,其通常由系统30产生,具有系统30的准静态、悬停和非静态动态/行为的影响,如先前部分和本文中所提及的。
根据该实施方式,系统30具有基本上升力产生形状(例如轮廓90),其参考沿着水平方向(例如,该水平方向是基本上实现升力在提升本体模块34上产生的典型的飞行方向)延伸的中心水平轴线62。中心水平轴线62在下文中被称为标准弦线或中心线。所有其他非标准弦线(也称为弦线)平行于水平方向延伸,但并不意味着运载工具对称。在本发明的范围内的其他实施方式不需要具有标准弦线。因此,如果系统30具有沿着该参考轴线的大致限定的前向或反向运动,则标准弦线62或下文中的任何其他弦线限定纵向轴线。
跨距线64垂直于包括任何其他现有弦线的标准弦线62延伸,并且通常沿着运载工具的较窄跨距延伸(其通常可以进一步支持对飞行产生贡献的较小升力)。跨距线64通常不对飞行器产生任何对称暗示。因此,如果系统30沿着该轴线具有左或右运动,则跨距线64在下文中限定横向轴线。
然而,大部分纵向对准和大部分横向对准的运动的定义由一个或多个操作代理进一步从上下文驱动,并且另外在引导和导航系统66内连同其设置/编码一起定义,所述设置/编码通常包括多个惯性测量单元、指南针、磁力计、高度传感器、引导和导航支持传感器、路径规划支持传感器、状态估计器、控制器、命令和控制架构、自适应控制、操作者/飞行员、低级算法、支持传感器的低级算法、更高级算法、支持传感器的更高级算法、人工智能、机载协同计算、机外协同计算、应答器、防撞系统及其组合,而没有一个或多个协同外部定位系统、内部定位系统、全球定位系统或其组合,或者没有来自一个或多个协同外部定位系统、内部定位系统、全球定位系统或其组合的协助。为了帮助图形表示,引导和导航系统66被描绘为包含字母“G&N”的框,由此其位置被内部地、外部地或以其组合分散在整个系统30中。
这里在大多数图中示出,与基本上左或右运动相比,通常前向和反向运动更有效地利用了系统30的显著升力产生潜力和/或净机动系统的显著移位益处。
因此,系统30可以替代性地以基本上前向或反向的运动操作,使得系统30的显著升力产生潜力和/或净机动系统的显著移位益处在基本上左运动或右运动中支配。还包括在本公开中,运载工具32的空气动力学升力产生潜力和净机动系统的移位益处可以通过设计或者受域和/或环境条件影响而对于运动基本上平衡、对于运动基本上不平衡、或者对于运动在平衡与不平衡之间交替。
进一步限定的是,附接至系统30的现有推进设备、推力矢量化设备、一个或多个辅助机动装置、或其组合可以彼此独立地、一致地、部分一致地、部分彼此独立地、或以其组合施加力。
图1B至图1D示出了包含运载工具32的系统30的一个实施方式的等轴图,其中,配备的推力矢量化模块包含一个或多个自由度。
图1B示出了现有的左前推力矢量化模块92、右前推力矢量化模块94、左后推力矢量化模块96、和右后推力矢量化模块98,前述这些模块大部分以一致的方式部署。
图1C示出了现有的左前推力矢量化模块92、右前推力矢量化模块94、左后推力矢量化模块96和右后推力矢量化模块98,前述这些模块大部分以相对于标准弦线62交替一致的方式部署。
图1D示出了现有的左前推力矢量化模块92、右前推力矢量化模块94、左后推力矢量化模块96、和右后推力矢量化模块98,前述这些模块大多数以相对于跨距线64交替一致的方式部署。
图1D示出了现有的左前推力矢量化模块92、右前推力矢量化模块94、左后推力矢量化模块96和右后推力矢量化模块98,前述这些模块大多数以独立的方式部署。如图所示,配备的一个或多个推力矢量化模块的部署构型/致动基本上有助于系统30的运动。
进一步限定的是,附接至系统30的现有推进设备、推力矢量化设备、一个或多个辅助机动装置或其组合引起昆虫样可操作性(insect-like operability),如在随后的附图中进一步论述的。短语“飞行路径”被定义为飞行中的物体所形成或遵循的空气或空间中的路径。这不限于在空气中飞行,这是因为除了空气之外,在其他流体中如在水中的飞行也是可能的。术语“空气”被定义为在航空航天工程(空气动力学或流体力学)中研究的流体,并且通常被研究为连续体。短语“昆虫样可操作性”被定义为系统在二维或三维中突然改变飞行路径/方向的能力、对控制器输入的实质性响应、对致动推力矢量偏转的实质性响应、对推力大小变化的实质性响应、或其组合。
此外,本文公开的常规设计的另外的改进是具有昆虫样可操作性与保持水平线(表面参考)的最恒定的视野/取向的组合。
图2A示出了包含运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力另外由改变运载工具32相对于表面/基准的迎角的能力辅助,使得运载工具32能够以可互换的方式基本上围绕系统30的大部分陷口/质心点A旋转,从而构成基本上俯仰的操纵。
此外,点A被定义为系统30的净动态中心,其通常受内部产生的力、内部产生的力矩、系统产生的力、系统产生的力矩、空气动力学效应、外力、外部力矩、其他机动干扰源或其组合影响。此外,系统30构造成以有限或无限的角移位沿多个方向中的一个方向旋转。系统30的净自由度实现操作,由此一个或多个现有传感器比如上部安装的传感器封装件100通过系统30的取向的改变而被操纵/重定向。
系统30重定向一个或多个现有传感器的能力增加了本设计的任务适用性。例如,一个或多个常平架致动/机构被制成冗余的或过时的,这是因为运载工具32改变其取向的能力允许其跟踪感兴趣的对象或地点,使其自身根据需要对准飞行规划等等。
图2A示出了描绘相对取向的概念的一个实施方式,由此在给定系统30的宽范围的运载工具本体迎角操纵的情况下,定向重新分配策略是可能的。例如,飞机具有确定的前部或后部以及顶部或底部,直升机或多旋翼(例如,三旋翼、四旋翼、六旋翼、八旋翼,分别指3旋翼飞行器、4旋翼飞行器、6旋翼飞行器和8旋翼飞行器)或其他典型的地面/海上运载工具,但是给定系统30的机动性,顶部可以变成底部,然后变成侧部,然后再变成底部,前部可以变成底部,然后变成顶部,然后变成后部等。此外,例如,在图2A的最上面的视图中,上部安装的传感器封装件100是左定向/面向的,当系统30主要围绕点A旋转时,上部安装的传感器封装件100变成右定向/面向的,如最下面的视图所示。因此,给定系统30的宽范围的倾斜致动,上部安装的传感器封装件可以向上、横向、向下等指向。例如,如果固定传感器正在搜索地板表面上的热点,则相同的固定安装的传感器可以用于搜索天花板表面上、墙壁表面上的热点,或者在运载工具自身定向之后沿着楼梯的飞行向下搜索热点。
图2A中所描述的倾斜应用程序在与绕竖向轴线63的偏航旋转联接时基本上允许系统30成为其自己的“平移和倾斜系统”;因此,半刚性或刚性配备的感测封装件可能不需要其自己的万向节致动器。系统30整体上在静止/悬停飞行和非悬停飞行中用作机载万向节。例如,在悬停状态下时,系统30将能够在表面上反射的激光指示器沿任何方向(向上、向下和从一侧到另一侧)移动时自主地跟踪激光指示器。此外,在相同的示例中,运载工具将能够跟踪相同的激光指示器反射,即使当系统30在任何方向上平移其自身时亦是如此。在实践中,例如,该能力适用于搜索感兴趣的点,或者跟踪内部的动态特征,同时消除对独立的平移和倾斜致动装置的需要,从而允许所公开的发明更轻、具有更低的成本、具有更多的部件、使用更少的功率等。
用于探索和/或操纵环境的“平移和/或倾斜”整个系统30的概念对于所有配备的硬件的辅助是有效的,所述硬件包括但不限于:传感器、操纵器、通信装置、天线、有效载荷、有效载荷递送机构、起落架系统等。全系统平移和倾斜功能对于着陆区不均匀或动态改变取向/姿态的起飞操作或着陆操作也是有用的。系统范围的平移和倾斜功能也可用于减少损失和故障保护操作。例如,如果推进模块坠落,则系统30可以自动地重新定向其自身以在碰撞的情况下重新获得稳定性/可控性或者减小冲击力。全系统的平移和倾斜功能也有助于有限的空间操作。例如,系统30在主要如图2A的俯视图或仰视图中所示的那样定向时将能够横穿竖向轴,或者在处于该相同取向时,系统将能够“削边(knife-edge)”到部分打开的门中等等。通过在下面的附图中论述的各种实施方式,进一步增强了系统范围的平移和倾斜功能。
图2B示出了包含运载工具32的系统30的实施方式,其还包括净机动作用力,所述净机动作用力另外由改变运载工具32相对于表面/基准面的迎角的能力辅助,从而使得运载工具32能够在整个360度取向范围上,以可互换的方式围绕一般飞行路径弧中心部分地平移以及围绕系统30的大部分中心/质心点A部分地旋转,从而构成大部分俯仰操纵。此外,所提供的视图序列示出了飞行器在处于基本上非悬停飞行时的飞行过渡期间的迎角控制权限和取向,其中,平移速度矢量102与关于点A的力矩组合存在,使得运载工具以可互换的方式迁移到水平取向(在序列中的俯视图和最低视图中示出)和竖向取向(在序列中的最右视图中示出)以及从水平取向(在序列中的俯视图和最低视图中示出)和竖向取向(在序列中的最右视图中示出)迁移回。此外,最初面向上的上部固定感官封装件100经由操纵重新定向,并且以可互换的方式面向下结束同时迁移通过若干其他取向。此外,所有机载传感器可以在飞行过渡的过程中有益于取向迁移。
图2C示出了包含运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力另外由改变运载工具32相对于表面/基准104的迎角的能力辅助,同时使得运载工具32能够围绕一般飞行路径弧形中心部分地平移,以及围绕大部分居中/质心点A部分地旋转,作为对本文使得可能的起飞或着陆取向的类型的附加功能。此外,系统30可以根据下降期间的本体迎角首先着陆在其与表面的接触点中的任何一个或更多个接触点上。例如,运载工具可以“着陆在其前爪上”或“着陆在其后爪上”,例如,类似于跳跃后的动物。系统30还配置成基本上竖向地着陆,具有朝向表面/基准104定向的后部38本体部段或前部36本体部段,使其成为在其基本上竖向的着陆配置上可翻转的坐尾式运载工具。
图2D和图2E示出了包含运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力另外由系统30的基本上保持竖向(由此标准弦线62相对于表面/基准104垂直)取向79的能力辅助并且进一步沿大致一致的方向部署一个或多个推力矢量化模块92、94、96和98,同时使得运载工具32能够基本上平移至向右方向81(图2D)或向左方向83(图2E)。
图2F示出了包含运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力另外由系统30的基本上保持竖向取向79(由此标准弦线62相对于表面/基准104大部分垂直),并且进一步部署一个或多个推力矢量化模块,不与点A对准而是在大致一致的方向上朝向运载工具的前半部(96和98)定位,同时使得运载工具32能够大致围绕点A旋转顺时针85并且主要将点A平移到向右方向81,或者主要围绕点A逆时针87旋转并且主要将点A平移到向左方向83。
图2G示出了包含运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力另外由系统30的基本上保持竖向取向79(由此标准弦线62相对于表面/基准104大部分垂直)的能力辅助,并且进一步部署一个或更多个推力矢量化模块,不与点A对准而是在大致一致的方向上朝向运载工具的后半部(96和98)定位,同时使得运载工具32能够大致围绕点A顺时针85旋转并且大致将点A平移至向右方向81,或者大致围绕点A逆时针87旋转并且大致将点A平移至向左方向83。
图2H示出了包含运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力另外由系统30的基本上保持竖向取向79(由此标准弦线62相对于表面/基准104大部分垂直)的能力辅助,并且进一步部署一个或多个推力矢量化模块,不与点A对准而是在大致一致但基本上彼此相反的方向上朝向运载工具的前半部(98和96)或运载工具的后半部(92和94)定位,同时使得运载工具32能够基本上围绕点A顺时针85旋转,或者围绕点A逆时针87旋转。以上一种或多种操纵在飞行操作期间可能引起或可能不引起高度损失,但是在飞行器可能具有相当大浮力的流体(浸没)操作中尤其重要,因此,能够主要围绕点A旋转。
此外,图2A至图2H还包括机动作用力,该机动作用力另外由用以改变运载工具的相对于表面/基准104的迎角的能力辅助,由此配备的推力矢量化模块92、94、96和98最大程度地产生了与重力对准的合成推力线。
图2F至图2H中所示的定向改变和机动作用力(例如在从基本上水平的姿态开始时,由此标准弦线大部分平行于表面/基准104)构成了可以或可以不进一步受益于系统30的空气动力学产生能力的附加俯仰操纵。此外,系统30构造成在其所有平移和倾斜操纵和取向中保持在沿其轴线的力和绕其轴线的力矩方面的操作权限。
图3A示出了包含主题运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力附加地由改变一个或多个推力矢量化模块92、94、96和98的取向的能力辅助,进一步由选择、预设或命令给定运载工具相对于地面的迎角的能力辅助,这使得系统30能够动态地平移。使净推力矢量化设备倾斜的附加能力在产生大部分平移运动的同时使得系统30能够保持预设的迎角,使得水平线的现有取向保持在其飞行路径中并且随后保持处于期望的感官视野(例如,当以第一人称飞行时相机的视野)。例如,这对于感测和操纵环境是特别有价值的。附加地,由操纵一个或多个推力矢量化模块92、94、96和98的一个或多个旋转自由度(倾斜角)的能力实现的系统30的固有控制权限进一步实现了“昆虫样操作”,所述昆虫样操作包括在二维或三维中突然改变飞行路径/方向的能力、对控制器输入的实质响应灵敏度、对致动推力矢量偏转的实质响应、对推力大小变化的实质响应或其组合。
图3B示出了包含运载工具32的系统30的实施方式,其还包括改变一个或多个推力矢量化模块92、94、96和98的取向的能力,进一步由选择、预设或命令给定运载工具相对于地面的迎角的能力辅助,这使得系统30能够在与图3A相反的方向/飞行路径上动态地平移。前向、反向、横向平移飞行同时保持本体迎角并可能受益于气动升力的存在的组合能力在本文中被称为“仪表板飞行”。
图3A和图3B进一步加强了先前引入的不存在绝对取向定义的概念,由此改变飞行路径(通常指示运载工具的前部变为运载工具的后部,并且反之亦然)动态发生,并具有在整个可用速度状态中保持相对于表面/基准的本体迎角的附加能力。具有类似直升机的飞行状态的飞行器(如直升机和传统的多旋翼飞行器)必须权衡相对于地面的迎角以获得速度。具有类似飞机的飞行状态的飞行器(如在固定翼航空中那样)同时能够在它们的整个可用速度范围内相对于地面保持设定的本体迎角,不能实现双向行进(即,在与其原始起飞路径相反的方向上)。
图4A至图4E示出了图1B中示出的实施方式的俯视图。
图4B至图4E示出了来自图1B至图1E所示的实施方式的配备有推力矢量化模块92、94、96和98的附加部署。
图4B示出了包含主题运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力另外由改变一个或多个推力矢量化模块92、94、96和98的取向的能力辅助,同时使得运载工具能够围绕位于所显示的运载工具左侧的一般飞行路径弧中心部分地平移,并且围绕大部分居中/质心点A旋转,从而构成基本上偏航状操纵。
图4C示出了包含主题运载工具32的系统30的实施方式,该主题运载工具32还包括净机动力,该净机动力另外由改变一个或多个推力矢量化模块92、94、96和98的取向的能力辅助,同时使得运载工具能够围绕位于所显示的运载工具右侧的一般飞行路径弧中心部分地平移,并且围绕大部分居中/质心点A部分地旋转,从而构成相反的基本上偏航状操纵。
图4D示出了包含主题运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力附加地由改变一个或多个推力矢量化模块92、94、96和98的取向的能力辅助,同时使得运载工具能够基本上围绕大部分居中/质心点A旋转,从而构成基本上偏航状操纵。
图4E示出了包含主题运载工具32的系统30的实施方式,其还包括净机动作用力,该净机动作用力另外由改变一个或多个推力矢量化模块92、94、96和98的取向的能力辅助,同时使得运载工具能够围绕位于所显示的运载工具右侧的一般飞行路径弧中部分地平移,并且围绕大部分居中/质心点A部分地旋转,从而构成相反的基本上偏航状操纵。更重要的是,应当指出,一个或多个推进装置的差值推力产生还影响围绕运载工具30的轴线(纵向轴线62、横向轴线64、竖向轴线63)或其组合中的每一者的运载工具本体力矩。此外,沿着运载工具的轴线(纵向轴线62、横向轴线64、竖向轴线63)作用的一致的、联接的、独立的或组合大小的推力操纵生成在与多个推进装置的倾斜致动(另外具有多个自由度中的一个自由度)联接时通过创建多个二维或三维平移控制、旋转控制或组合控制来进一步增强系统30的可操作性。
因此,如以上附图中分段描绘的那样,在大部分或基本上静止的操作中操纵相对于表面/基准的迎角和操纵偏航方向的组合能力使得系统30能够是其自己的常平架,进一步使得系统30能够在大部分或基本上悬停的飞行状态中围绕给定空间扫掠。此外,由于系统30能够从上到下重新定向或者从下到上重新定向,从左到右重新定向或者从右到左重新定向,因此可用的旋转范围超过常规万向支架行程限制。
图2A、图2B、图2C、图3A、图3B、图4B、图4C、图4D和4E中所述的运动在混合动力VTQL型运载工具、旋翼运载工具(包括典型的多旋翼概念)和类似飞机的运载工具中是不可能的。系统30配置成在空中操作、非空中操作、过渡操作等中相对于表面/基准两者操纵运载工具本体迎角。
如本文所包含的所有附图中所描绘的操纵的部分或集合系统30能力进一步实现了具有或不具有自动化和/或具有或不具有全球定位系统(GPS)的许多算法实现、更高级可操作性、复杂交互、复杂控制、复杂物理引导和导航及其组合。
图5A和图5D示出了包含运载工具32的系统30的实施方式的侧视图,其还包括配备有推力矢量化模块92、94、96和98的一个或多个倾斜致动,其迎角取向可以在表面上方对系统30产生或不产生运动效应,同时另外改变运载工具32相对于表面的驾乘高度,由此弦跨距62保持基本上平行于表面/基准104。
图5E示出了包含运载工具32的系统30的一个实施方式的侧视图,该运载工具32还包括配备有推力矢量化模块92、94、96和98的一个或多个倾斜致动,其迎角取向可以在表面上方对系统30产生或不产生运动效应,同时另外改变运载工具32相对于表面的驾乘高度和驾乘角度。
图5F示出了包含运载工具32的系统30的实施方式的正视图,其还包括配备有推力矢量化模块92、94、96和98的一个或多个倾斜致动,其迎角取向可以在表面上方对系统30产生或不产生运动效应,同时另外改变运载工具相对于基准表面104的横向倾斜角(图5F的顶部)或者组合地改变运载工具相对于基准表面104的横向倾斜角度和驾乘角度(图5F的底部),进一步使与表面105接触的一个或多个运载工具点能够从基准表面104抬起(升起)。
此外,例如,如图5A至图5F中所描述的组合机动性与运载工具的迎角操纵一起允许其执行以下任务:起飞并使给定传感器面向下方(图2C)、在从气动本体外壳产生升力的同时有效地向前飞行(图7A和图7B),然后过渡并着陆,使得相同的传感器面朝上(图2C),然后使推力矢量化模块向前倾斜以在表面上方驱动(图5A)和转向(图1C以及图4B至图4E),从而在卡车下方推进其自身并且检查其违禁品或隐藏装置(如果被认为是威胁,则在肯定识别时起诉目标),进一步在卡车下方使用其他形式的倾斜和侧倾(图5E和图5F),然后从其下方反向滚出(图5B),然后进行翻滚起飞(图6),并且返回。
图6示出了包含运载工具32的系统30的实施方式的侧视图,其还包括推力矢量化模块92、94、96和98在滚动起飞运行的辅助下的倾斜致动,由此大部分短起飞可以受益于或可以不受益于由具有或不具有其其他配合模块的提升本体模块34产生的气动升力。
图7A和图7B示出了包含运载工具32的系统30的实施方式的侧视图,其还包括推力矢量化模块92、94、96和98的倾斜致动,同时辅助从主要悬停飞行(图7A)的飞行模式转换至大部分向前(虚线)飞行(图7B),同时部分地共享推力矢量化模块92、94、96和98的动力升力106的生成,以及由具有或不具有其其他配合本体模块的提升本体模块34产生的部分空气动力学升力108。此外,当在水平(虚线)飞行中时,系统30还包括相对于基准表面(水平线)104对正迎角、负迎角和零迎角进行自动保持的能力,使得气动升力产生可以被直接操纵(例如,系统30可以为巡航飞行设定相对于地面的有效迎角,并且另外在水平飞行操作期间动态地改变迎角)。例如,系统30设定入射角的能力允许气动升力产生从动力升力产生推力矢量化模块卸载功率消耗;因此减少能量消耗并增强飞行时间、航程和/或有效载荷重量能力等。此外,在产生升力和具有最小横截面阻力面积的同时向前平移的能力减小了阻力,并且再次增加了系统30的性能。例如,当旋转升力被“借用”以产生向前推力矢量时,典型的直升机或多旋翼必须枢转(倾斜)到预期的飞行路径中;因此,向前飞行的能量消耗在于为小的向前矢量分量重新分配升力矢量以及通过倾斜整个机身来增加面向前的阻力面积,这些问题至少由于如图7A和图7B中所描绘的以上描述而得以解决,同时还具有实现更大的向前飞行速度的能力。
图8A、图8B和图8C示出了系统30的实施方式的等轴图以及对应的俯视图,该系统30包含运载工具32,该运载工具32还包括与提升本体模块34、前本体模块36和后本体模块38相配合的一个或多个推力矢量模块111的模块化特性,同时还示出了模块化运行系统30的多功能性,该多功能性进一步通过一个或多个混合推进配合模块的即插即用能力来实现。
图9A和图9D示出了包含主题运载工具32的系统30的一个实施方式的等轴图和相关详细视图(图9B至图9D的轴测图和侧视图),其还包括以组合方式的一个或多个混合模块化推进配合模块111的多功能性,适用于基于地面的可操作性,同时主要利用流体加速机动机构进行空中操作和辅助的主动和/或被动驱动型机动机构。图9B(111的替代细节实施方式视图)替代地利用螺旋桨型推进设备113用于基本上空中操作。图9C(111的替代细节实施方式视图)替代地利用叶轮型推进装置115用于基本上空中操作。图9D(111的替代细节实施方式视图)另外利用了包括自含式(火箭)、排气产生、能量爆发等的基于排气的推进设备117。
图10A至图10D示出了包含主题运载工具32的系统30的一个实施方式的等轴图和相关详细视图(10B至图10D的轴测图和侧视图),其还包括以组合方式的一个或多个混合模块化推进配合模块111的多功能性,同时将所描绘的系统实施方式转换为基本上非空中应用,适于利用一个或更多个主驱动型机动机构119和辅助驱动型机动机构119的多样性的多定向和/或多地面可操作性,所述主驱动型机动机构119和辅助驱动型机动机构119以任何组合被主动地和/或被动地驱动。
图11A和图11D示出了包含主题运载工具32的系统30的优选实施方式的等轴图和相关详细视图(图11B至图11D的轴测图和侧视图),其还包括以组合方式的一个或多个模块化推进配合模块111的多功能性,同时将所描绘的实施方式转换为基本上非空中应用,适于多定向和/或多地面可操作性同时主要利用主动伸展型机动机构和/或被动伸展型机动机构和辅助驱动型机动机构的。图11A(111的替代细节实施方式视图)利用了基本由一个或多个抓取型延伸装置121构成的主机动机构。图11B(111的替代细节实施方式视图)利用了基本由一个或多个配合/咬合型延伸装置123构成的主机动机构。图11C(111的替代细节实施方式视图)利用了基本由一个或多个铲/撬型延伸装置125构成的主机动机构,并且图11D(111的替代细节实施方式视图)利用了基本由一个或多个钩挂/捕获型延伸装置127构成的主机动机构。
图12A至12D示出了包含运载工具32的系统30的实施方式的等轴图,所述运载工具32还包括地面型主动或被动机动装置的协作定向和/或定位,以增强一个或多个模块化推力产生模块的可操作性,在这种情况下,术语“推力”是指当倾斜致动使任何给定的推力矢量化模块围绕其指定的自由度旋转时,运载工具可以如何推动其自身。
图13A至图13C示出了包含运载工具32的系统30的实施方式的等轴图,其还包括分散在整个运载工具中的一个或多个感测封装件和支持硬件安置件;图13A示出了用于致动感测封装件110、用于附加的前和后感测封装件112以及附加的前和后支承硬件114、以及用于附加的倾斜致动感测封装件116的安置,图13B示出了用于表面安装的感测封装件118和用于附加的可缩回感测封装件120的安置,并且图13C示出了用于通孔腹部安装的感测封装件122和附加支承硬件124以及用于附加倾斜致动的面向下的感测封装件126的安置。
图14A至图14E示出了例如与图13A和图13C所示的本体模块相似的本体模块,该本体模块构造成容纳一个或多个装置,一个或多个所述装置具有需要一个或多个不同安装策略的多个功能,其不限于开口128、封闭件130、一个或多个竖向开口132、一个或多个水平开口134和复合安装件136。
图15A示出了具有截面切口的代表性提升本体模块34的非组装俯视图,该截面切口的剖视图(图15B)揭示了存在一个或多个结构部件138,进一步指定一个或多个内部分隔策略,而无论具有或不具有设计的故障模式与否。
图16A示出了代表性的可互换的前本体部段(模块)36或后本体部段(模块)38的非组装俯视图,该前本体部段(模块)36或该后本体部段(模块)38支承基本上内部的并且可选地分离的硬件载体140。图16B详述了硬件载体142的整个安置和快速安装系统。图16C是图16B的详细视图,其示出了分离特征144的设计失效模式的一个示例,其增强了现有硬件在遇到不利的(设计的或意外的)偶然事件时的生存能力。
图17A和图17B分别示出了包含运载工具32的系统30的实施方式的等轴俯视图和等轴仰视图,其还包括源自增材制造的制备技术,其可以包含增材制造设计和制造过程基本上固有的内部压印图案化、外部压印图案化、或直通压印图案化,使得包括但不限于基于感测、基于视觉、基于张量流、基于人工智能或以组合方式的算法可以识别一个或多个其他运载工具的存在,同时识别下述各者:运载工具角色、运载工具真实性、运载工具配置、运载工具状态、运载工具遇险、运载工具通信、运载工具管理机构或其组合。这样的压印图案化可以进一步由照明技术辅助,以便允许白天或夜间识别这样的图案化集合。类似地,安装在环境中的压印图案可以传达属性或唯一识别标记,以便在运载工具的任务过程中帮助运载工具。此外,压印可以提供其他被动属性比如伪装、营销、视觉识别/区分、运载工具版本区分等。
图18A、图18B和图18C分别示出了包含运载工具32的系统30的实施方式的等轴俯视图、正视图和侧视图,其还包括一个或多个模块化海洋推力矢量化模块148在流体动力制备中适于水下应用的基本上专用的功能,同时主要利用流体加速机动机构进行流体150中或流体150上的操作。
图19A和图19B分别示出了包含运载工具32的系统30的实施方式的等轴俯视图和侧视图,其还包括以组合方式适于水上应用(基本上在流体150顶上)的一个或多个模块化推力矢量化模块的多功能性,同时主要利用用于空中操作的流体加速机动机构和辅助海运型主动或被动机动机构。
图20A至图20C示出了包含运载工具32的系统30的实施方式的主要俯视图,其还包括一个或多个推力矢量化模块的倾斜致动,一个或多个所述推力矢量化模块执行基本上横向对准的运动,同时当系统在基本上受限的空间中行进时使系统主要围绕弦跨距152倾斜。对于该实施方式,横向对准的运动主要沿着标准弦线致动。因此,由于本发明提供的取向的相对性质,运载工具的前部156取向和后部158取向被限定为主要沿着侧壁154运行,并且左160取向和右162取向被限定成朝向左或右侧壁154。例如,为了在由箭头163示出的大致方向上横穿所描绘的空间,运载工具围绕弦跨距轴线152旋转以产生部分向前指向的力。为了跟踪侧壁154之间的主要居中的路径,配备的倾斜致动推力矢量化模块操作运载工具,如图20A至图20C所示,其中,倾斜致动推力矢量化模块在部署时具有基本上昆虫样的响应性以基本上辅助横向机动控制。因此,系统30的显著更大的横向响应在利用更高级的算法和控制策略时可以快速地避免与侧壁的碰撞,而不具有必须远离壁倾斜的传统多旋翼飞行器的携带动量问题(这通常引起剧烈的效果,特别是由于存在壁的边界层和地面效应)。本公开最小化或消除了这些负面影响,这是因为倾斜致动提供了快速响应,并且在图20A至图20C的情况下,当沿着有限空间行进时,如从正视图观察到的,本体保持与表面齐平。
图21示出了运载工具系统30的一个实施方式,其中,运载工具32经由系绳166连接至固定或移动连接点168,固定或移动连接点168可以是空中的、接地的、两栖的或海上的。除了结构承重系绳结构之外,系绳166还可以承载例如电、光纤、其他信号承载部件或其任何组合。
系绳连接件164可以位于该系绳连接件164的任何位置上,使得连接件164具有接合能力以及脱离能力。
系绳操作方法允许系绳飞行能力并具有脱离系绳以便按命令飞行的附加益处。附加地,至少一条或多条系绳166可以连接至由运载车辆运输的至少一个或多个拖曳物体168。
图22A示出了主题系统30的实施方式,主题系统30还包括运输至少一个乘员170的能力,乘员170的健康状态可能是有生命的或无生命的。
图22B示出了主题系统30的实施方式,该主题系统30还包括通过捏合主题运载工具来容易地装载或卸载一个或多个乘员170以及一个或多个通用有效载荷并且/或者服务于任何功能主体的一个或多个有效载荷的能力,如在本公开的先前附图中另外描述的那样,并且另外包括一个或多个快速装载设备176(图22C),所述一个或多个快速装载设备176可以或可以不与一个或多个装载辅助门172和/或一个或多个舱口174基本上协作地工作。
图23示出了由两个计算体系构成的适航系统架构201的一个实施方式的顶层功能框图,即,低级计算体系200和高级计算体系202。稳定性和控制所需的核心(低级)计算能力驻留在容纳飞行控制器单元204的低级计算体系200中,该飞行控制器单元204包含一个或多个协作算法(例如,状态估计器等),由此包括一个或多个惯性测量单元206和其他支持飞行传感器208的引导传感器向飞行控制器204提供输入。惯性测量单元(inertialmeasurement unit,IMU)206可以包括但不限于加速度计、磁力计、一个或多个陀螺仪、指南针、气压计或其组合。此外,飞行控制器204可以具有其自己的IMU传感包,以用于主要或辅助(故障保护)操作。
通常与外部环境信息的变化检测、寻找和/或跟踪有关的其他飞行传感器208可以包括但不限于全球定位传感器(例如,GPS等)、本地定位传感器(例如,光流等)、测距仪(激光雷达等)或其组合。此外,一个或多个命令和控制(C&C)线210可以无线地与飞行控制器单元204通信,由此控制命令被远程地传输至相应的一个或多个机载接收器。命令和控制线210块被定位以简化整体框图,并且通常指示可以从多于一个源实现适航系统架构201的远程命令和控制。因此,命令和控制线210块还通常描绘了信号的定向性质,由此至飞行控制器单元204的输入通常是控制输入,并且从飞行控制器单元204发射的信号基本上用于遥测监测。此外,命令和控制线210块通常还描绘了处理信号的发送和接收的无线通信系统的存在。
命令和控制线210可以从一个或多个手持式导频发射机214或一个或多个地面控制站(ground control station,GCS)212生成。进一步地,系统30不需要存在基于膝上型计算机的GCS,并且不需要遥测反馈。在完全自主模式中,手持式导频发射机214和GCS 212两者都可以作为架构的一部分被禁用或不被安装。
飞行控制器单元204具有推进驱动系统220的直接或可切换的控制权限,其可以包括但不限于电子速度控制器和马达。
要求有条件的(例如,感测和避免等)、高自主性(感测和导航等)和/或完全自主性(导航和优先化)的核心(较高级的)计算能力驻留在包含一个或多个协作算法(量程、映射等)的较高级计算体制202中、容纳一个或多个中央处理单元(CPU)224、具有或不具有基本上由感知传感器套件222支持的图形处理单元(GPU)能力,其中,所述感知传感器套件222可以包括但不限于立体相机、单目相机、复合相机、雷达、声纳、激光雷达(旋转或固定)、热等。例如,在机载CPU 224中运行的经训练的人工智能(AI)算法在搜索所配备相机的观察帧中的生命或移动的迹象时,可以引导控制器自主地飞向感兴趣的位置。
旁路216是倾斜致动系统的控制可以可选地由手持式导频发射机214、GCS 212或机载CPU 224共享的接合点。假如鲁棒飞行控制器单元204的存在,经由可用的倾斜致动推力矢量对系统30的倾斜致动的控制(如许多现有附图中所描述的)可以模拟飞行控制器204的瞬时或持续扰动而发生,或者更一般化地,模拟飞行控制器204对飞行系统架构201的瞬时或持续扰动而发生。结果是系统30倾斜其本体迎角以抵消一个或多个推力矢量化模块的外部命令的倾斜(如基本上在图2A至图2H中所论述的)或者保持命令的本体迎角,同时允许一个或多个推力矢量化模块的倾斜,以基本上以某种方式推进运载工具(如基本上在图3A和图3B,图4D至图AE,图6以及图7A和7B中所论述的)。此外,旁路216可以存在于飞行控制器单元204内部,物理地连接至飞行控制器单元204,由此倾斜致动命令可以或可以不由飞行控制器单元204本身进行进一步调节/改变;然而,无论是否改变信号,飞行控制器单元204都可以感测所命令的输入的存在以使运载工具倾斜,进而使得其自身的控制律可以适应所命令的取向变化。
此外,可以利用系统30的宽飞行包络的智能机器人行为实际上是在较高级的计算体制202处执行的。例如,旋转激光雷达可以用于绘制洞穴,但鉴于激光雷达的视野有限,系统30可以以35度头部向上取向流动。系统30的倾斜将允许旋转的激光雷达同时映射凹穴的顶板、凹穴的侧壁和壳体的底板。此外,就向下悬挂的障碍物(钟乳石)而言,对环境的了解/感知将使避障算法可以人为地超越控制控件或自主避开一个或多个障碍物。此外,通过如以上示例中所述使运载工具倾斜,不需要仅用于跟踪天花板特征的冗余传感器。
图24示出了系统30的一个实施方式的视图。
图25示出了运载工具提升本体32的实施方式的各种视图视角,该运载工具提升本体32还包含前本体部段36和后本体部段34。
还应当指出的是,在不脱离本发明的精神或范围的情况下,致动、推进装置和具有附加自由度的机构类型的姿态和/或取向还可以以组合的方式实现。因此,运载工具保持以单数或组合方式沿所有方向平移,并围绕所有运载工具轴线产生本体力矩(在航空航天工程术语中通常称为侧倾、俯仰和横摆)的能力,以创建各种操作域中的操作价值所需的广泛稳定性和控制,而对于所有所论述的实施方式,每个域对系统30具有各种环境影响,并且所有各种实施方式都具有在本发明的精神或范围内的附加形式和变型。
虽然已经结合本发明的具体形式和实施方式对本发明进行了描述,但是应当理解的是,在不脱离如所附权利要求中限定的本发明的精神或范围的情况下,可以采取比上述那些修改更多的各种修改。例如,功能上等同的元件可以替代具体示出和描述的那些元件,某些特征可以独立于其他特征使用,并且在某些情况下,元件的特定位置可以颠倒或插入,所有这些都不脱离如所附权利要求限定的本发明的精神或范围。
- 跨领域或环境中的任一者或组合的多任务应用程序的运行平台系统
- 一种虚拟机环境中应用程序部署和运行的装置及方法