一种无人机机载动态测试系统
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及无人机测试技术领域,尤其是一种无人机机载动态测试系统。
背景技术
无人机的设计和应用在现代社会中是一个活跃的领域,而对于无人机飞行器的整体效率和气动性能的评估,是一个至关重要的方面。目前对于无人机飞行器参数的评估,主要包括对螺旋桨的拉力、扭矩、电压、电流、系统效率、空速、电机转速等数据的测量,现有技术中多采用地面静态试验。无人机机载动态数据测量是飞行器在真实飞行环境下,应用测量的一种方案,具有工程应用价值和可靠的测量结果,而针对于无人机机载的动态数据测量,则目前还没有被研发应用。
所以,对于上述现有技术中的空缺,则需设计一种无人机机载动态测试系统。
发明内容
本发明的目的在于克服现有技术的不足,提供一种可测量动力系统拉力、功耗与效率以及螺旋桨的拉力和扭矩的无人机机载动态测试系统。
本发明解决其技术问题是采取以下技术方案实现的:
一种无人机机载动态测试系统,包括机身,所述机身的前端设置有机头,所述机身的两侧设置有机翼,其特征在于:所述机身的后侧还设置有尾翼,位于所述机身的后端还设置有螺旋桨,所述机身与螺旋桨之间还设置有动拉力测试装置,所述的动拉力测试装置通过电机与所述螺旋桨相连。
通过动拉力测试装置连接无人机的电机,并将电机与螺旋桨相连,可以实时检测无人机的螺旋桨的拉力或推力,还可以测量无人机电机的功耗与效率,以及螺旋桨的桨效等数据,采用动拉力测试装置,不仅可以对无人机动力系统进行评估和优化,也可以完成飞行器的气动参数的测量。
优选的,所述的电机电连接有电机调速器,所述的电机调速器连接有动力电池。
所述的电机调速器可以对电机的转速进行调整,来满足不同规格的飞行器的飞行工作。
优选的,所述的电机调速器连接有飞机控制接收器,所述的飞机控制接收器连接有主控盒,所述的主控盒电连接有电功率测量模块。
所述的电功率测量模块主要是为了测量飞行器系统输入的电流值和电压值,通过测量的数值来判断无人机在飞行过程中的工作状态。
优选的,所述的电功率测量模块还连接有测试系统电池。
所述的测试系统电池为电功率测量模块进行供电。
优选的,所述的动拉力测试装置上集成有换相转速传感器、温度传感器、气压传感器、电压电流传感器和拉力扭矩传感器。
所述的换相转速传感器采集电机的转速数据,所述的温度传感器采集无人机在飞行工作时的外部环境温度,所述的气压传感器采集无人机在飞行过程中所受的气压值,所述的电压电流传感器采集无人机电源系统的输入端的电流值和电压值,所述的拉力扭矩传感器采集螺旋桨在工作时的扭矩力和拉力。
优选的,所述的换相转速传感器、温度传感器、气压传感器、电压电流传感器和拉力扭矩传感器均电连接在所述的主控盒中。
所述的换相转速传感器、温度传感器、气压传感器、电压电流传感器和拉力扭矩传感器分别将采集到的数据信息传输到主控盒中,并通过飞机控制接收器将数据远传至地端,供用户查看。
优选的,所述的机头上安装有压差(空速)传感器,所述的压差(空速)传感器电连接在所述主控盒中。
所述的压差(空速)传感器采集飞行器相对于周围空气的运动速度值,并将其传输至主控盒中。
优选的,所述的动力电池的电压测量范围为7-70V,其电流范围为0-200A。
本发明的优点和积极效果是:
本发明的飞行器在飞行过程中,通过动力电池给电机供电,带动螺旋桨的旋转,螺旋桨的旋转产生了拉力和扭矩,其中飞行器系统的电压和电流通过电功率测量模块采集,同时,无人机机载动拉力测试装置可以测量动力系统的拉力、功率和效率,以及可以测量无人机飞行器的发动机功耗与效率、螺旋桨的桨效等数据信息,完成了对无人机飞行状态时的实时动态测试。且主控盒可以收集飞行器的电压、电流、拉力、扭矩、发动机的功率和效率等数据,可以实现实时对飞行器的各种数据信息进行检测,以观察飞行器的运行状态。此外,主控盒连接飞机控制接收器,动态测试系统可以通过飞机控制接收器将采集的数据远传至地端,做到数据的实时图表显示,并对采集的数据进行实时存储,存储频率达到10HZ。
附图说明
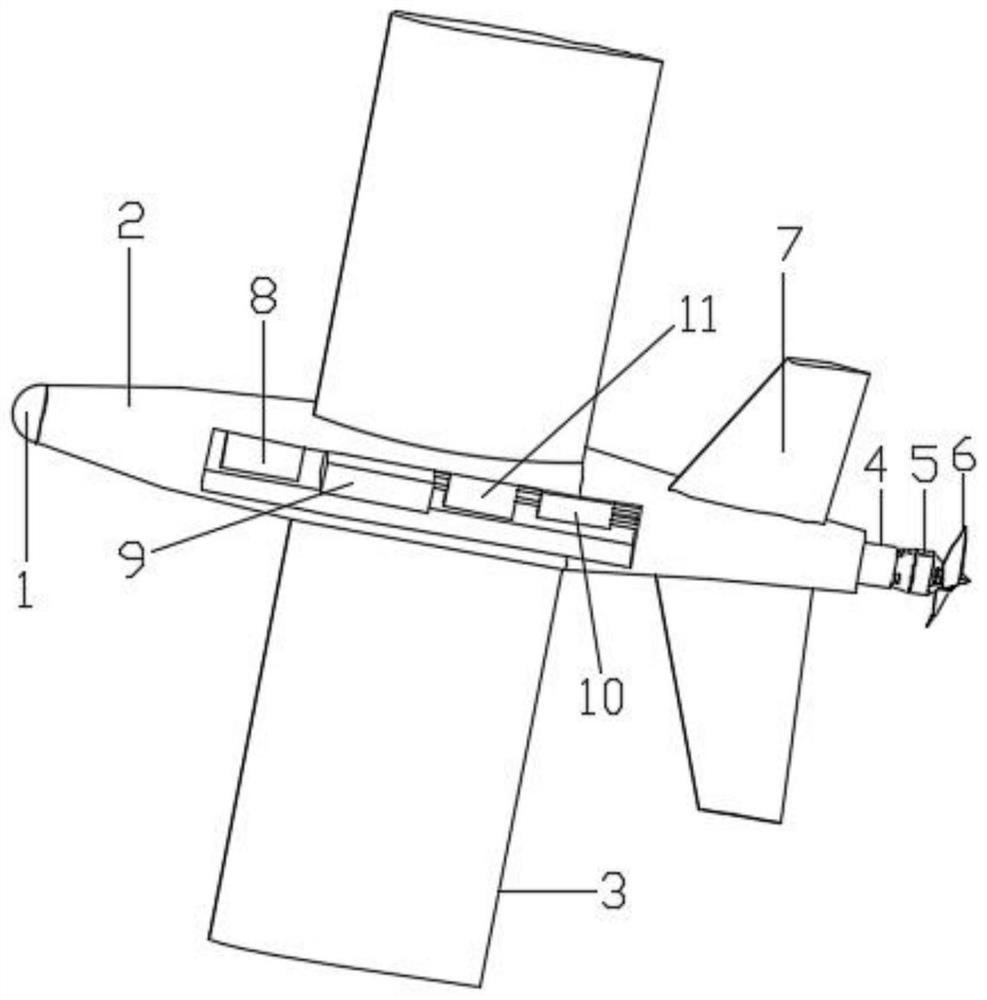
图1是本发明的轴侧正视结构示意图;
图2是本发明的轴侧仰视结构示意图;
图3是本发明的各部件之间电连接示意图。
图中:1、机头;2、机身;3、机翼;4、动拉力测试装置;5、电机;6、螺旋桨;7、尾翼;8、主控盒;9、动力电池;10、电机调速器;11、电功率测量模块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
以下结合附图对本发明实施例做进一步详述:
如图1和2所示,本发明所述的一种无人机机载动态测试系统,包括机身2,所述机身2的前端设置有机头1,所述机身2的两侧设置有机翼3,所述机身2的后侧还设置有尾翼7,位于所述机身2的后端还设置有螺旋桨6,所述机身2与螺旋桨6之间还设置有动拉力测试装置4,所述的动拉力测试装置4通过电机5与所述螺旋桨6相连。通过动拉力测试装置4连接无人机的电机5,并将电机5与螺旋桨6相连,可以实时检测无人机的螺旋桨6的拉力或推力,还可以测量无人机电机5的功耗与效率,以及螺旋桨6的桨效等数据,采用动拉力测试装置4,不仅可以对无人机动力系统进行评估和优化,也可以完成飞行器的气动参数的测量。
进一步,如图3所示,所述的电机5电连接有电机调速器10,所述的电机调速器10连接有动力电池9。所述的电机调速器10可以对电机5的转速进行调整,来满足不同规格的飞行器的飞行工作。
进一步,所述的电机调速器10连接有飞机控制接收器,所述的飞机控制接收器连接有主控盒8,所述的主控盒8电连接有电功率测量模块11。所述的电功率测量模块11主要是为了测量飞行器系统输入的电流值和电压值,通过测量的数值来判断无人机在飞行过程中的工作状态,所述的飞机控制接收器与地端信号发射器之间的通讯距离可达到2km。
进一步,所述的电功率测量模块11还连接有测试系统电池。所述的测试系统电池为电功率测量模块11进行供电。
进一步,所述的动拉力测试装置4上集成有换相转速传感器、温度传感器、气压传感器、电压电流传感器和拉力扭矩传感器。所述的换相转速传感器采集电机5的转速数据,所述的温度传感器采集无人机在飞行工作时的外部环境温度,所述的气压传感器采集无人机在飞行过程中所受的气压值,所述的电压电流传感器采集无人机电源系统的输入端的电流值和电压值,所述的拉力扭矩传感器采集螺旋桨6在工作时的扭矩力和拉力。
进一步,所述的换相转速传感器、温度传感器、气压传感器、电压电流传感器和拉力扭矩传感器均电连接在所述的主控盒8中。所述的换相转速传感器、温度传感器、气压传感器、电压电流传感器和拉力扭矩传感器分别将采集到的数据信息传输到主控盒8中,并通过飞机控制接收器将数据远传至地端,供用户查看。
进一步,所述的机头1上安装有压差(空速)传感器,所述的压差(空速)传感器电连接在所述主控盒8中。所述的压差(空速)传感器采集空速,即飞行器相对于周围空气的运动速度值,并将其传输至主控盒8中。
此外,所述的动力电池9的电压测量范围为7-70V,其电流范围为0-200A,主控盒8所储存的温度数值范围为-30℃~+60℃,其所使用时的温度范围为-20℃~+50℃,气压传感器的量程为50-120kpa,温度传感器测量的电机温度量程为-70℃~+350℃,温度传感器测量的环境温度的量程为-40℃~+125℃。所述的换相转速传感器的量程为300-150000RPM,所述的拉力扭矩传感器的拉力量程为5-70kgf,扭矩量程为0-50N·M。
当无人机飞行器在进行重着陆、剧烈振动或滑降打桨等对传感器有剧烈冲击的行为时,要对传感器进行自检,其自检步骤如下:先拔出主控盒8上的拉力扭矩传感器,将拉力扭矩传感器与电机5的任意轴切面保持与地面平行(即电机5主轴平行于地面),将螺旋桨6(二叶)水平对置(若三叶即保证拉力扭矩传感器不受力即可),接着给测试系统通电,并连接计算机观察拉力和扭矩的数值,拉力值应在100g以内,扭矩值应在0.01以内,并在通电状态下插回拉力扭矩传感器(保持拉力扭矩传感器不受力),观察计算机上的示数,若拉力值大于500g,扭矩值大于0.1NM,则说明拉力扭矩传感器损坏;若计算机上示数小于以上值,则说明拉力扭矩传感器工作正常。
具体实施时,将换相转速传感器、温度传感器、气压传感器、电压电流传感器、拉力扭矩传感器和压差(空速)传感器均接到主控盒8上,打开计算机,连接无人机的飞机控制接收器,通过各个传感器的参数观察各自传感器是否处于工作正常状态,若存在故障,则取下对应的传感器进行维修,若不存在故障问题,则对无人机的各个参数数值进行清零处理。螺旋桨6的拉力和扭矩清零时,将拉力扭矩传感器与电机5的任意轴切面保持与地面平行,将螺旋桨6水平对置,在稳定状态下清零。无人机空速清零时,在无风环境中使用空速管套罩住空速管,对空速进行清零。在无人机的各种数据信息清零后,启动无人机,在无人机飞行过程中,换相转速传感器采集电机5的转速数据,温度传感器采集无人机在飞行工作时的外部环境温度,气压传感器采集无人机在飞行过程中所受的气压值,电压电流传感器采集无人机电源系统的输入端的电流值和电压值,拉力扭矩传感器采集螺旋桨6在工作时的扭矩力和拉力,上述的传感器将各自采集到的数据传输至主控盒8中,并进行存储,主控盒8再将采集的数据通过飞机控制接收器远传至地端用户计算机处,在计算机上进行数据查看,通过测量无人机飞行器各个部位的工作时的数值,可以得知无人机的正常工作状态时的最佳参数。此动态测试系统可以实时记录飞行数据并远程传输至用户终端,用以无人机的工作研究。
本发明的飞行器在飞行过程中,通过动力电池9给电机5供电,带动螺旋桨6的旋转,螺旋桨6的旋转产生了拉力和扭矩,其中飞行器系统的电压和电流通过电功率测量模块11采集,同时,无人机机载动拉力测试装置4可以测量动力系统的拉力、功率和效率,以及可以测量无人机飞行器的发动机功耗与效率、螺旋桨6的桨效等数据信息,完成了对无人机飞行状态时的实时动态测试。且主控盒8可以收集飞行器的电压、电流、拉力、扭矩、发动机的功率和效率等数据,可以实现实时对飞行器的各种数据信息进行检测,以观察飞行器的运行状态。此外,主控盒8连接飞机控制接收器,动态测试系统可以通过飞机控制接收器将采集的数据远传至地端,做到数据的实时图表显示,并对采集的数据进行实时存储,存储频率达到10HZ。
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
- 一种无人机机载动态测试系统
- 无人机机载航电设备测试系统及测试方法