旋翼组件以及飞行器
文献发布时间:2023-06-19 10:33:45
技术领域
本申请涉及飞行器领域,特别是涉及一种惯性控制旋翼组件以及具有该旋翼组件的飞行器。
背景技术
倾斜盘是目前大部分飞行器操纵系统中用来操纵旋翼总距和桨叶周期变距的一种特殊装置,以实现飞行器的升降、前后、左右运动。
传统的飞行器例如直升机中的倾斜盘用于调整直升机的旋翼的螺距,从而在直升机的旋转面上产生不同象限上的升力差,以此升力差来改变直升机的飞行方向。
因此,传统的飞行器旋翼系统要实现旋翼系统的变距必须要使用倾斜盘,而倾斜盘往往占用的空间较大,结构复杂。如果出现故障后维修的难度和成本较高,结构的稳定性也难以保证。
综上所述,目前还需要一种结构更加简单,成本比倾斜盘更低,结构更加稳定的旋翼组件,来替代传统的飞行器倾斜盘、并同样实现操控飞行器的飞行方向。
发明内容
本发明提供一种旋翼组件,可以不依赖传统的倾斜盘,同样达到直升机旋翼系统变距的效果。
为解决所述技术问题,本申请提供一种旋翼组件,包括:
桨座;
第一惯性传动组件,与所述桨座连接;
第一桨叶,与所述第一惯性传动组件连接;
第二惯性传动组件,与所述桨座连接;
第二桨叶,与所述第二惯性传动组件连接;
所述桨座在绕其旋转轴线转动时能够通过所述第一惯性传动组件带动所述第一桨叶旋转,通过所述第二惯性传动组件带动所述第二桨叶旋转;其中,当所述桨座减速时,所述第一惯性传动组件能够在惯性作用下带动所述第一桨叶转动进而增大所述第一桨叶的迎角,所述第二惯性传动组件能够在惯性作用下带动所述第二桨叶转动进而减小所述第二桨叶的迎角,当所述桨座减速后加速时,所述第一惯性传动组件能够在惯性作用下带动所述第一桨叶转动进而减小所述第一桨叶的迎角,所述第二惯性传动组件能够在惯性作用下带动所述第二桨叶转动进而增大所述第二桨叶的迎角。
本发明还提供了一种飞行器,包括机体、接收器、控制器、无刷电机、角度传感器以及本发明提供的旋翼组件;所述旋翼组件与所述无刷电机连接;
其中,所述无刷电机驱动所述旋翼组件旋转;所述角度传感器检测所述无刷电机的旋转角度并将旋转角度信息发送给所述控制器;所述接收器接收控制信号,并发送给所述控制器;所述控制器根据所述控制信号和所述旋转角度信息控制所述无刷电机的刹停位置和刹停周期,实现所述旋翼组件周期性变距。
本申请的有益效果是:桨座在绕其旋转轴线转动时能够通过第一惯性传动组件和第二惯性传动组件带动第一桨叶和第二桨叶旋转;桨座在具有加速度时,第一惯性传动组件和第二惯性传动组件能够在惯性作用下带动第一桨叶和第二桨叶转动进而改变第一桨叶的迎角和第二桨叶的迎角,使得可以不依赖传统的倾斜盘,同样达到直升机旋翼系统变距的效果,该旋翼组件结构简单且可靠性高。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,其中:
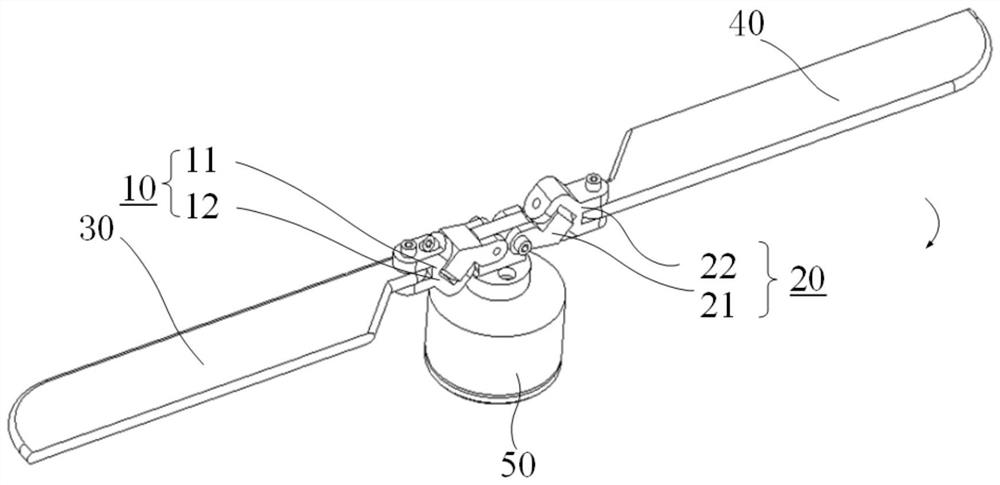
图1是本发明旋翼组件的一实施例主视图;
图2是本发明旋翼组件的一实施例惯性传动组件结构图;
图3是本发明旋翼组件的一实施例第一惯性传动组件结构连接图;
图4是本发明旋翼组件的一实施例第二惯性传动组件结构连接图;
图5是本发明旋翼组件的一实施例在某一运动状态下的变距示意图;
图6是本发明旋翼组件的一实施例桨座结构图;
图7是本发明旋翼组件的另一些实施例主视图;
图8是本发明旋翼组件的一实施例Ⅰ区域的透视图;
图9是本发明飞行器的主视图;
图10是本发明飞行器去除机体的结构图。
附图标记:10第一惯性传动组件,20第二惯性传动组件,30第一桨叶,40第二桨叶,50桨座,60第一安装座,70第二安装座,80第一惯性件,81第一杠杆,90第二惯性件,91第二杠杆,11第一铰链座,21第二铰链座,12第一桨夹,22第二桨夹,α第一夹角,β第二夹角β,101第一连接部,102第二连接部,201第三连接部,204第四连接部,51固定座,52连接板,121第一夹持部,221第二夹持部,131第三夹持部,231第四夹持部,300第一齿轮传动组件,400第二齿轮传动组件,301第一主动齿轮,302第一从动齿轮,401第二主动齿轮,402第二从动齿轮,130第一转轴,140第二转轴,230第三转轴,240第四转轴,01机体,02旋翼组件,03无刷电机,04控制模块。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本申请的一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
本申请中的术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
如图1所示,本发明实施例提供一种旋翼组件,该旋翼组件可以包括桨座50、第一惯性传动组件10、第一桨叶30、第二惯性传动组件20、第二桨叶40。可以理解,本发明提供的旋翼组件的性传动组件和桨叶的数量不限于两个,也可以为三个或四个等。本实施例中,以两个惯性传动组件和两个桨叶为例进行说明。
第一惯性传动组件10与桨座50连接,第一桨叶30与第一惯性传动组件10连接,第二惯性传动组件20与桨座50连接,第二桨叶40与第二惯性传动组件20连接。
当桨座50在绕其旋转轴线转动时,能够通过第一惯性传动组件10带动第一桨叶30旋转,并同时通过第二惯性传动组件20带动第二桨叶40旋转。
在桨座50以一定初速度绕其转轴线旋转时,第一惯性传动组件10、第一桨叶30、第二惯性传动组件20、第二桨叶40均绕桨座50的轴线旋转。
在此刻给予桨座50一个减速度,第一惯性传动组件10能够在惯性作用下带动第一桨叶30转动进而增大第一桨叶30的迎角,第二惯性传动组件20能够在惯性作用下带动第二桨叶40转动进而减小第二桨叶40的迎角。第一桨叶30迎角增大的大小和第二桨叶40迎角减小的大小与桨座50的初速度、减速度的大小有关,也和自身的构造、惯性传动组件的构造有关,此处不再限定迎角改变的程度。
可以控制初速度、减速度的大小,来控制第一桨叶30和第二桨叶40迎角改变的大小。
第一桨叶30的迎角增大,第一桨叶30的桨面受到的升力增大;第二桨叶40的迎角减小,第二桨叶40的桨面受到的升力减小,此时旋翼组件整体往第一桨叶30的方向倾斜。
同理,倾斜的角度和迎角改变的大小有关;同样的,可以控制初速度、减速度的大小,来控制旋翼组件倾斜程度。
在桨座50减速后,第一桨叶30相对第一惯性传动组件10进行了转动,第二桨叶40相对第二惯性传动组件20进行了转动,此刻再重新对桨座50进行加速,第一惯性传动组件10能够在惯性作用下带动第一桨叶30转动进而减小第一桨叶30的迎角,第二惯性传动组件20能够在惯性作用下带动第二桨叶40转动进而增大第二桨叶40的迎角。
第一桨叶30的迎角减小,第一桨叶30的桨面受到的升力减小;第二桨叶40的迎角增大,第二桨叶40的桨面受到的升力减小,此时旋翼组件整体往第二桨叶40的方向倾斜。
因为桨座50减速后,旋翼组件整体往第一桨叶30的方向倾斜,而在加速后,旋翼组件往第二桨叶40方向倾斜,也就是旋翼组件往原始的飞行状态恢复。
若在对匀速旋转的桨座50同一转动位置时刻下,周期性对桨座50施加一个瞬时的减速度,可以使旋翼组件整体往某个方向倾斜,而倾斜过后迅速恢复初始的运动状态,直到桨座50转动至相应位置,旋翼组件往之前同一方向倾斜。
如图2至图4所示,在一些实施例中,第一惯性传动组件10可以包括第一铰链座11、第一桨夹12,第二惯性传动组件20包括第二铰链座21、第二桨夹22。
参阅图3和图4,第一铰链座11与桨座50连接,第一桨夹12的一端通过第一斜轴110与第一铰链座11连接,第二铰链座21与桨座50连接,第二桨夹22的一端通过第二斜轴210与第二铰链座11连接。
当桨座50减速时,第一桨夹12和第一桨叶30由于惯性力的作用下,绕着第一斜轴110往初速度方向转动,进而增大第一桨叶30的迎角;此后对桨座50加速,第一桨夹12和第一桨叶30由于惯性力的作用下,绕着第一斜轴110转轴往滞后方向转动,进而减小第一桨叶30的迎角。
当桨座50减速时,第二桨夹22和第二桨叶40由于惯性力的作用下,绕着第二斜轴210往初速度方向转动,进而减小第二桨叶40的迎角;此后对桨座50加速,第二桨夹22和第二桨叶40由于惯性力的作用下,绕着第二斜轴210转轴往滞后方向转动,进而增大第二桨叶40的迎角。
在一些实施例中,继续参阅图3和图4,第一铰链座11包括第一连接部101、第二连接部102,第一连接部101的一端与第二连接部102的一端刚性连接,第一连接部101与第二连接部102之间具有第一夹角α;第二铰链座21包括第三连接部201、第四连接部202,第三连接部201的一端与第四连接部202的一端刚性连接,第三连接部201与第四连接部202之间具有第二夹角β。
第一夹角α大于90°小于180°,优选为120°-150°,例如130°、145°或150°。
第二夹角β大于90°小于180°,优选为120°-150°,例如130°、145°或150°,第一夹角α大小等于第二夹角β大小。
第一连接部101与第三连接部201位于同一直线上且位于第一桨叶30和第二桨叶40的旋转平面内,第二连接部102往靠近桨座50的方向弯折设置,第四连接部202往远离桨座50的方向弯折设置,第二连接部102平行于第四连接部202,即可以通过单纯的平移变化,实现第一夹角α与第二夹角β互为对顶角关系。
第一斜轴110垂直设置于第二连接部102上,第二斜轴210垂直设置于第四连接部202上,第一斜轴110平行于第二斜轴210且不平行于桨座50旋转的旋转面或第一桨叶30和第二桨叶40的旋转平面。第一桨叶30和第二桨叶40的旋转平面与第一斜轴110的夹角可以为大于等于30°且小于等于60°。在一个实施例中,第一桨叶30和第二桨叶40的旋转平面与第一斜轴110的夹角为45°。
因为第一斜轴110平行于第二斜轴210且不平行于所述桨座50旋转的旋转面,所以在桨座50获得减速后,第一桨夹12和第一桨叶30可以通过惯性力的作用下,绕着第一斜轴110往初速度方向转动,进而增大第一桨叶30的迎角;第二桨夹22和第二桨叶40可以通过惯性力的作用下,绕着第二斜轴210往初速度方向转动,进而减小第二桨叶40的迎角。
因为第一斜轴110平行于第二斜轴210且不平行于所述桨座50旋转的旋转面,所以在桨座50减速后加速时,第一桨夹12和第一桨叶30可以通过惯性力的作用下,绕着第一斜轴110转轴往滞后方向转动,进而减小第一桨叶30的迎角;第二桨夹22和第二桨叶40由于惯性力的作用下,绕着第二斜轴210转轴往滞后方向转动,进而增大第二桨叶40的迎角。
第一夹角α大小于第二夹角β大小相等,第二连接部102往靠近桨座50的方向弯折设置,第四连接部202往远离桨座50的方向弯折设置,意味着第二连接部102可以与第四连接部202相互平行。
第一连接部101与第三连接部201平行于桨座50旋转的旋转面,当桨座50绕其轴线旋转时,第一连接部101与第三连接部201的旋转面与桨座50的旋转面平行。
在一些实施例中,请参阅图2至图4,第一桨夹12还包括第一夹持部121,第二桨夹22还包括第二夹持部221。第一夹持部121夹持第二连接部102,夹持的两端分别位于第一转轴110的两端;第二夹持部221夹持第四连接部202,夹持的两端分别位于第二转轴210的两端。可以理解,也可以在第二连接部102和第四连接部202上设置夹持部,将第一桨夹12和第二桨夹22的端部夹持。或者,桨夹和连接部均设置夹持。
在一些实施例中,继续参阅图5,第一铰链座11与桨座50通过转动轴旋转连接,第二铰链座21与桨座50通过转动轴旋转连接,使得第一铰链座11能够在垂直于桨座50的旋转平面内旋转,第二铰链座21能够在垂直于桨座50的旋转平面内旋转,第一铰链座11和第二铰链座21在垂直于桨座50的旋转面的平面内的旋转方向相同。
图5为一些实施例中对匀速旋转的桨座50施加一个瞬时减速度后旋翼组件的状态图。因为第一桨叶30迎角增大,受到的升力变大,第一铰链座11在垂直于桨座50的旋转平面内向升力增大的方向旋转;第二桨叶40迎角变小,受到的升力减小,第二铰链座21在垂直于桨座50的旋转平面内旋转向升力减小的方向旋转。
第一铰链座11、第二铰链座21旋转的幅度大小可控,可通过控制第一桨叶30和第二桨叶40迎角改变的大小来改变第一铰链座11、第二铰链座21旋转的幅度大小。
当瞬时减速度消失、恢复初速度后,第一桨叶30的迎角变小,受到的升力变小,第一铰链座11在垂直于桨座50的旋转平面内向升力减小的方向旋转;第二桨叶40迎角增大,受到的升力变大,第二铰链座21在垂直于桨座50的旋转平面内旋转向升力增大的方向旋转,直到恢复至初始运动状态。
在一些实施例中,参阅图6,桨座50还包括固定座51以及与固定座51连接的连接板52,第一连接部101还包括第三夹持部131,第三夹持部201以夹持连接板52的方式形成第一连接部与桨座50连接;第三连接部201还包括第四夹持部231,第四夹持部231以夹持连接板52的方式形成第三连接部201与桨座50连接。可以理解,也可以在连接板52上设置夹持部,或连接板52与连接部上均设置夹持部。
第一铰链座11与桨座50通过转动轴旋转连接时,可以以第三夹持部131夹持连接板52的两端为转动轴的两端,使得第一铰链座11能够在垂直于桨座50的旋转平面内旋转。第二铰链座21与桨座50通过转动轴旋转连接时,可以以第四夹持部231夹持连接板52的两端为转动轴的两端,使得第二铰链座21能够在垂直于桨座50的旋转平面内旋转。
在另一些实施例中,请参阅图7和图8,图8为图7Ⅰ区域的透视图,第一惯性传动组件10包括,第一安装座60,第一齿轮传动组件300,第一桨夹12以及第一惯性件80。第一齿轮传动组件300设置于第一安装座60上,第一桨夹12一端与第一齿轮传动组件300连接,另一端与第一桨叶30连接,第一惯性件80与第一齿轮传动组件300连接。第二惯性传动组件20包括,第二安装座70,第二齿轮传动组件400,第二桨夹22以及第二惯性件90。第二齿轮传动组件300设置于第二安装座70上,第二桨夹22一端与第二齿轮传动组件400连接,另一端与第二桨叶40连接,第二惯性件90与第二齿轮传动组件400连接。
当桨座50绕其轴线旋转时,能带动第一安装座60、第一齿轮传动组件300、第一桨夹12、第一桨叶30、第一惯性件80、第二安装座70、第二齿轮传动组件400、第二桨夹22、第二桨叶40、第二惯性组件90一起旋转。
当桨座50减速时,第一惯性件80在惯性力的作用下继续转动,从而带动第一齿轮传动组件300转动,第一齿轮传动组件300带动第一桨夹12和第一桨叶30转动,进而增大第一桨叶30的迎角大小;第二惯性件90在惯性力的作用下继续转动,从而带动第二齿轮传动组件400转动,第二齿轮传动组件400带动第二桨夹22和第二桨叶40转动,进而减小第二桨叶40的迎角大小。
第一桨叶30的迎角增大,第一桨叶30的桨面受到的升力增大;第二桨叶40的迎角减小,第二桨叶40的桨面受到的升力减小,此时旋翼组件整体往第一桨叶30的方向倾斜。
当桨座50减速后加速时,第一惯性件80在惯性力的作用下带动第一齿轮传动组件300转动,第一齿轮传动组件300带动第一桨夹12和第一桨叶30转动,进而减小第一桨叶30的迎角大小;第二惯性件90在惯性力的作用下带动第二齿轮传动组件400转动,第二齿轮传动组件400带动第二桨夹22和第二桨叶40转动,进而增大第二桨叶40的迎角大小。
第一桨叶30的迎角减小,第一桨叶30的桨面受到的升力减小;第二桨叶40的迎角增大,第二桨叶40的桨面受到的升力减小,此时旋翼组件整体往第二桨叶40的方向倾斜,旋翼组件往原始的飞行状态恢复。
在一些实施例中,一并参阅图7和图8,第一齿轮组件300包括第一转轴130,第一主动齿轮301,第二转轴140以及第一从动齿轮302。第一转轴130与第一安装座60旋转连接,第一转轴130的第一端通过第一杠杆81与第一惯性件80连接,第二端与第一主动齿轮301连接。第二转轴140与第一安装座60旋转连接且与第一转轴130垂直设置,第二转轴140的第一端与第一桨夹12固定连接,第二端与第一从动齿轮302刚性连接,第一主动齿轮301与第一从动齿轮302啮合连接。第二齿轮组件400包括第三转轴230,第二主动齿轮401,第四转轴240以及第二从动齿轮402。第三转轴230与第二安装座70旋转连接,第三转轴230的第一端通过第二杠杆91与第二惯性件90连接,第二端与第二主动齿轮401连接。第四转轴240与第二安装座70旋转连接且与第三转轴230垂直设置,第四转轴240的第一端与第二桨夹22固定连接,第二端与第二从动齿轮402刚性连接,第二主动齿轮401与第二从动齿轮402啮合连接。
当第一惯性件80在惯性力的作用下运动时,能通过第一杠杆81带动第一转轴130转动,第一转轴130带动第一主动齿轮301转轴,第一主动齿轮301带动第一从动齿轮302转动从而使得第二转轴140转动,第二转轴140转动带动第一桨夹12和第一桨叶30转动最终改变第一桨叶30的迎角大小。
当第二惯性件90在惯性力的作用下运动时,能通过第二杠杆91带动第三转轴230转动,第三转轴230带动第二主动齿轮401转轴,第二主动齿轮401带动第二从动齿轮402转动从而使得第四转轴240转动,第四转轴240转动带动第二桨夹22和第二桨叶40转动最终改变第二桨叶40的迎角大小。
在一些实施例中,第二转轴140和第四转轴240平行于桨座50的旋转面,在桨座50带动第二转轴140和第四转轴240旋转时,第二转轴140绕桨座50的旋转轴的旋转面与第四转轴240绕桨座50的旋转轴的旋转面与桨座50的旋转面两两相互平行,第二转轴140的旋转面也可以与第四转轴240的旋转面位于同一平面。
在一些实施例中,第一转轴130与第二转轴140位于同一平面,该平面垂直于桨座50的旋转面。
在一些实施例中,第三转轴230与第四转轴240位于同一平面,该平面垂直于桨座50的旋转面。
可选的,第一转轴130、第二转轴140、第三转轴230、第四转轴240可以位于同一平面,该平面垂直于桨座50的旋转平面。
在一些实施例中,第一转轴130位于第二转轴140远离桨座的一侧,第三转轴230位于第四转轴240远离桨座50的一侧。第一惯性件80位于第一桨叶30远离桨座50的一侧,第二惯性件90位于第二桨叶40远离桨座的一侧。
在一些实施例中,第一转轴130与第一惯性件80间具有一定距离,第三转轴230与第二惯性件90间具有一定距离。
可选的,第一转轴130与第一惯性件80之间的距离可以通过第一杠杆81的长度进行调节,第三转轴230与第二惯性件90之间的距离可以通过第二杠杆91的长度进行调节,该距离能让桨座50减速时的第一惯性件80和第二惯性件90产生惯性运动即可。
可选的,第一惯性件80和第二惯性件90可以为摆锤组件,或其他具有一定质量的组件。
第一转轴130与第一惯性件80间的距离越大,在桨座50减速时第一惯性件80获得的惯性力越大;第二转轴230与第二惯性件90间的距离越大,在桨座50减速时第二惯性件90获得的惯性力越大,按照此原理,可以通过控制转轴和惯性件的距离,来控制惯性件获得的惯性力大小,最终达到控制桨叶迎角大小变化的程度。
可选的,第一杠杆81和第二杠杆91可以被设置为可调整长度的结构,可以通过调节第一杠杆81和第二杠杆91的长度,改变桨叶迎角变化程度。
本发明还提供一种飞行器,在一些实施例中,参阅图9和图10,飞行器可以包括机体01、旋翼组件02、无刷电机03和控制模块04。旋翼组件02为本发明上述提供的旋翼组件。旋翼组件02安装于机体01上。机体01能够通过旋翼组件02提供的动力进行飞行。无刷电机03与旋翼组件02连接,以带动旋翼组件02旋转。控制模块04内设置有接收器、控制器和角度传感器,控制模块04电性连接于无刷电机03。
请参阅图10,无刷电机03可以和桨座50连接,设置在桨座50内。无刷电机03驱动旋翼组件02旋转;控制模块04中的角度传感器检测无刷电机03的旋转角度并将旋转角度信息发送给控制模块04中的控制器;接收器接收控制信号,例如,来自远端遥控器的飞行姿势控制信号,并发送控制信号给控制器。
控制器还可配置为控制无刷电机03的转动速度和无刷电机03转动角度位置,控制器根据控制信号和旋转角度信息控制无刷电机03的刹停位置和刹停周期。
当无刷电机03在同一转动角度周期性刹停时,旋翼组件02周期性向同一方向变距,飞行器可以往特定方向前进。
以上仅为本申请的实施方式,并非因此限制本申请的专利范围,凡是依靠惯性传动组件导致桨叶迎角改变的结构或者其他结构的等效变换,或直接或间接运用在其他相关的技术领域,均同理包括在本申请的专利保护范围内。
- 旋翼组件及具有旋翼组件的无人飞行器
- 旋翼组件及具有旋翼组件的无人飞行器