一种遥感无人机结构
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及无人机,更具体的说是一种遥感无人机结构。
背景技术
例如公开号CN211893673U一种无人机飞行防撞装置,包括无人机本体,所述无人机本体顶部固定安装有防撞体,所述防撞体顶部活动设置有第一螺栓,所述无人机本体底部活动设置有连接杆,所述连接杆外壁活动设置有滑动环,所述滑动环外部固定安装有第一防撞杆,所述第一防撞杆于滑动环外壁呈“十”字型分布,所述第一防撞杆外壁固定安装有第一防撞环,所述连接杆底部固定安装有电伸缩装置,所述电伸缩装置底部固定设置有第二防撞环,所述第二防撞环内壁固定安装有第二防撞杆,所述防撞体于无人机本体顶部和底部对称分布;该实用新型的缺点是不能大幅度的改变飞行臂的位置。
发明内容
本发明的目的是提供一种遥感无人机结构,可以大幅度的改变飞行臂的位置。
本发明的目的通过以下技术方案来实现:
一种遥感无人机结构,包括飞行支架、摆动机构、飞行臂和飞行机构,所述摆动机构设置有两个,飞行臂设置有两个,飞行机构设置有两个,两个摆动机构均连接在飞行支架上,两个飞行臂分别连接在两个摆动机构上,两个飞行机构分别连接在两个摆动机构和两个飞行臂上。
作为本技术方案的进一步优化,本发明一种遥感无人机结构,所述飞行支架包括侧支架、连接支架、间隙球腔体和辅助翼,侧支架设置有两个,两个侧支架的中部之间固定连接有连接支架,两个侧支架的后端之间固定连接有辅助翼,两个侧支架的外侧均固定连接有间隙球腔体。
作为本技术方案的进一步优化,本发明一种遥感无人机结构,所述摆动机构包括摆动电机Ⅰ、摆动支架、横移电机、横移滑块、转动支架和滑动筒,摆动电机Ⅰ的输出轴上固定连接有摆动支架,摆动支架上固定连接有横移电机,横移电机的输出轴上通过螺纹连接有横移滑块,横移滑块滑动连接在摆动支架上,横移滑块上转动连接有转动支架,转动支架上固定连接有滑动筒,连接支架上固定连接有两个摆动电机Ⅰ。
作为本技术方案的进一步优化,本发明一种遥感无人机结构,所述飞行臂包括滑动柱、间隙球体、铰接支架、收展电机Ⅰ和收展臂,滑动柱上固定连接有间隙球体,滑动柱的端部固定连接有铰接支架,铰接支架上固定连接有收展电机Ⅰ,收展电机Ⅰ的输出轴上固定连接有收展臂,两个滑动筒上均滑动连接有滑动柱,两个间隙球体分别间隙配合在两个间隙球腔体内。
作为本技术方案的进一步优化,本发明一种遥感无人机结构,所述飞行机构包括收展电机Ⅱ、飞行臂、收展转轴、飞行电机Ⅰ和飞行螺旋Ⅰ,收展电机Ⅱ和收展转轴传动连接,收展转轴上固定连接有飞行臂,飞行臂上固定连接有两个飞行电机Ⅰ,两个飞行电机Ⅰ的输出轴上均固定连接有飞行螺旋Ⅰ,两个铰接支架上均固定连接有收展电机Ⅱ,收展电机Ⅱ的输出轴和收展电机Ⅰ的输出轴同轴设置,收展转轴转动连接在收展臂上。
作为本技术方案的进一步优化,本发明一种遥感无人机结构,所述遥感无人机结构还包括支撑机构,支撑机构包括支撑电机、支撑筒、支撑支架和支撑臂,支撑电机固定连接在连接支架上,支撑筒设置有两个,两个支撑筒上均固定连接有支撑支架,两个支撑支架的前后两端均转动连接有支撑臂,支撑臂和支撑支架之间固定连接有扭簧,两个支撑筒均和支撑电机的输出轴传动连接,两个支撑筒分别转动连接在两个侧支架上。
作为本技术方案的进一步优化,本发明一种遥感无人机结构,所述遥感无人机结构还包括冲击机构,冲击机构包括摆动电机Ⅱ、冲击腔体、飞行电机Ⅱ、飞行螺旋Ⅱ、压气机构和堵塞柱,摆动电机Ⅱ固定连接在连接支架上,冲击腔体转动连接在两个侧支架之间,冲击腔体和摆动电机Ⅱ的输出轴传动连接,冲击腔体上固定连接有两个飞行电机Ⅱ,两个飞行电机Ⅱ的输出轴上均固定连接有飞行螺旋Ⅱ,飞行电机Ⅱ上固定连接有压气机构,飞行电机Ⅱ内固定连接有堵塞柱。
作为本技术方案的进一步优化,本发明一种遥感无人机结构,所述遥感无人机结构还包括阻挡机构,阻挡机构包括伸缩机构、堵塞塞和喷气孔,伸缩机构固定连接在冲击腔体上,伸缩机构的伸缩端上固定连接有堵塞塞,堵塞塞上设置有喷气孔,堵塞塞堵在冲击腔体的下端,堵塞柱堵在喷气孔内。
本发明一种遥感无人机结构的有益效果为:
本发明一种遥感无人机结构,可以通过支撑机构对装置进行地面上的支撑,摆动机构驱动飞行臂进行多位置的摆动,飞行臂带动飞行机构进行收展,进而在摆动机构和飞行臂的带动下飞行机构进行多方位运动,可以大幅度的改变飞行机构的位置,同时冲击机构在装置的起飞和飞行过程中,启动辅助飞行的作用,使得装置可以进行弹射起飞,并且可以在飞行中突然加速。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
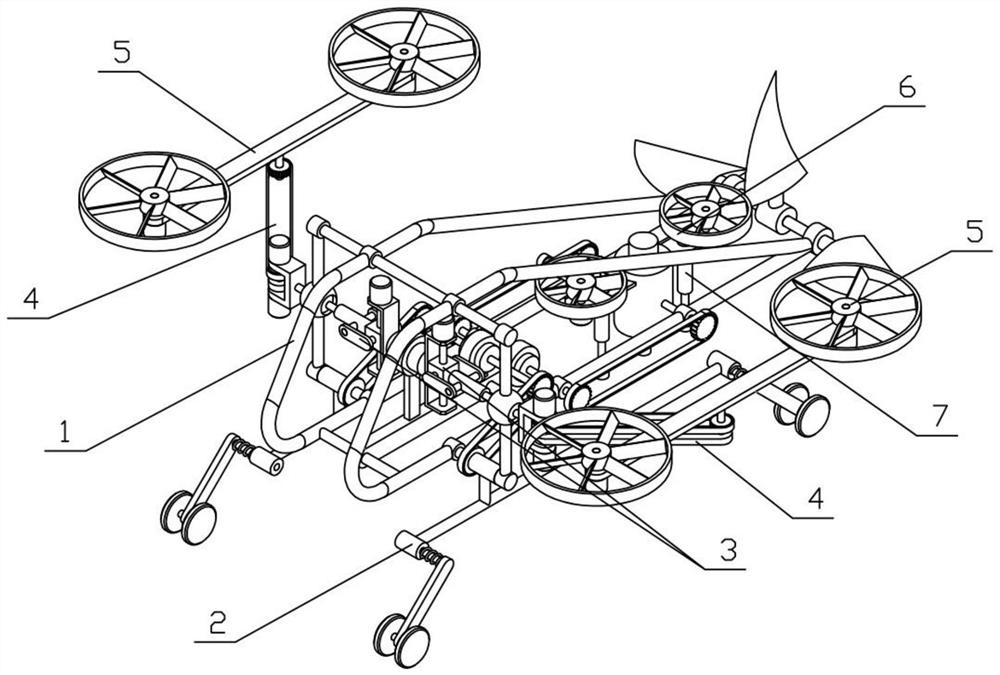
图1是本发明的遥感无人机结构整体结构示意图一;
图2是本发明的遥感无人机结构整体结构示意图二;
图3是本发明的飞行支架结构示意图;
图4是本发明的支撑机构结构示意图;
图5是本发明的摆动机构结构示意图;
图6是本发明的飞行臂结构示意图;
图7是本发明的飞行机构结构示意图;
图8是本发明的冲击机构结构示意图;
图9是本发明的冲击机构剖视图结构示意图;
图10是本发明的阻挡机构结构示意图。
图中:飞行支架1;侧支架101;连接支架102;间隙球腔体103;辅助翼104;支撑机构2;支撑电机201;支撑筒202;支撑支架203;支撑臂204;摆动机构3;摆动电机Ⅰ301;摆动支架302;横移电机303;横移滑块304;转动支架305;滑动筒306;飞行臂4;滑动柱401;间隙球体402;铰接支架403;收展电机Ⅰ404;收展臂405;飞行机构5;收展电机Ⅱ501;飞行臂502;收展转轴503;飞行电机Ⅰ504;飞行螺旋Ⅰ505;冲击机构6;摆动电机Ⅱ601;冲击腔体602;飞行电机Ⅱ603;飞行螺旋Ⅱ604;压气机构605;堵塞柱606;阻挡机构7;伸缩机构701;堵塞塞702;喷气孔703。
具体实施方式
下面结合附图对本发明作进一步详细说明。
在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”和“竖着”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接可以是直接连接,亦可以是通过中间媒介间接连接,可以是两个部件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
此外,在本发明的描述中,除非另有说明,“多个”、“多组”、“多根”的含义是两个或两个以上。
具体实施方式一:
下面结合图1至10说明本实施方式,一种遥感无人机结构,包括飞行支架1、摆动机构3、飞行臂4和飞行机构5,所述摆动机构3设置有两个,飞行臂4设置有两个,飞行机构5设置有两个,两个摆动机构3均连接在飞行支架1上,两个飞行臂4分别连接在两个摆动机构3上,两个飞行机构5分别连接在两个摆动机构3和两个飞行臂4上;可以通过支撑机构2对装置进行地面上的支撑,摆动机构3驱动飞行臂4进行多位置的摆动,飞行臂4带动飞行机构5进行收展,进而在摆动机构3和飞行臂4的带动下飞行机构5进行多方位运动,可以大幅度的改变飞行机构5的位置,同时冲击机构6在装置的起飞和飞行过程中,启动辅助飞行的作用,使得装置可以进行弹射起飞,并且可以在飞行中突然加速。
具体实施方式二:
下面结合图1至10说明本实施方式,本实施方式对实施方式一作进一步说明,所述飞行支架1包括侧支架101、连接支架102、间隙球腔体103和辅助翼104,侧支架101设置有两个,两个侧支架101的中部之间固定连接有连接支架102,两个侧支架101的后端之间固定连接有辅助翼104,两个侧支架101的外侧均固定连接有间隙球腔体103。
具体实施方式三:
下面结合图1至10说明本实施方式,本实施方式对实施方式二作进一步说明,所述摆动机构3包括摆动电机Ⅰ301、摆动支架302、横移电机303、横移滑块304、转动支架305和滑动筒306,摆动电机Ⅰ301的输出轴上固定连接有摆动支架302,摆动支架302上固定连接有横移电机303,横移电机303的输出轴上通过螺纹连接有横移滑块304,横移滑块304滑动连接在摆动支架302上,横移滑块304上转动连接有转动支架305,转动支架305上固定连接有滑动筒306,连接支架102上固定连接有两个摆动电机Ⅰ301;装置起飞后启动摆动电机Ⅰ301,摆动电机Ⅰ301的输出轴带动摆动支架302进行转动,摆动支架302带动横移滑块304和转动支架305进行转动,转动支架305带动滑动筒306进行转动,滑动筒306带动滑动柱401进行转动,滑动柱401上设置有限位凸起,图中并没有示出,主要是限制滑动柱401的转动,使得滑动柱401只能在滑动筒306内进行滑动,进而滑动筒306带动滑动柱401进行转动,飞行臂4发生偏转,进而飞行臂4带动飞行机构5进行偏转,同时启动横移电机303,横移电机303的输出轴通过螺纹带动横移滑块304进行升降,横移滑块304带动转动支架305进行运动,转动支架305带动滑动筒306进行运动,进而使得滑动柱401在滑动筒306内进行滑动,调整飞行臂4的偏转角度,摆动机构3可以带动飞行臂4进行多范围多角度的偏转。
具体实施方式四:
下面结合图1至10说明本实施方式,本实施方式对实施方式三作进一步说明,所述飞行臂4包括滑动柱401、间隙球体402、铰接支架403、收展电机Ⅰ404和收展臂405,滑动柱401上固定连接有间隙球体402,滑动柱401的端部固定连接有铰接支架403,铰接支架403上固定连接有收展电机Ⅰ404,收展电机Ⅰ404的输出轴上固定连接有收展臂405,两个滑动筒306上均滑动连接有滑动柱401,两个间隙球体402分别间隙配合在两个间隙球腔体103内。
具体实施方式五:
下面结合图1至10说明本实施方式,本实施方式对实施方式四作进一步说明,所述飞行机构5包括收展电机Ⅱ501、飞行臂502、收展转轴503、飞行电机Ⅰ504和飞行螺旋Ⅰ505,收展电机Ⅱ501和收展转轴503传动连接,收展转轴503上固定连接有飞行臂502,飞行臂502上固定连接有两个飞行电机Ⅰ504,两个飞行电机Ⅰ504的输出轴上均固定连接有飞行螺旋Ⅰ505,两个铰接支架403上均固定连接有收展电机Ⅱ501,收展电机Ⅱ501的输出轴和收展电机Ⅰ404的输出轴同轴设置,收展转轴503转动连接在收展臂405上;启动收展电机Ⅰ404,收展电机Ⅰ404的输出轴带动收展臂405进行转动,收展臂405带动飞行机构5进行运动,进而调整飞行机构5的收展状态,启动收展电机Ⅱ501,收展电机Ⅱ501的输出轴带动收展转轴503进转动,收展转轴503带动飞行臂502进行运动,进而进一步调整飞行机构5的收展状态,进而在摆动机构3和飞行臂4的带动下飞行机构5进行多方位运动,可以大幅度的改变飞行机构5的位置。
具体实施方式六:
下面结合图1至10说明本实施方式,本实施方式对实施方式五作进一步说明,所述遥感无人机结构还包括支撑机构2,支撑机构2包括支撑电机201、支撑筒202、支撑支架203和支撑臂204,支撑电机201固定连接在连接支架102上,支撑筒202设置有两个,两个支撑筒202上均固定连接有支撑支架203,两个支撑支架203的前后两端均转动连接有支撑臂204,支撑臂204和支撑支架203之间固定连接有扭簧,两个支撑筒202均和支撑电机201的输出轴传动连接,两个支撑筒202分别转动连接在两个侧支架101上;使用时装置在地面上还未起飞时,四个支撑臂204和地面接触,进而对装置进行支撑,启动四个飞行电机Ⅰ504,四个飞行电机Ⅰ504的输出轴带动对应的飞行螺旋Ⅰ505进行转动,进而带动装置进行起飞,当需要装置进行弹射起步时,启动飞行电机Ⅱ603,飞行电机Ⅱ603的输出轴带动飞行螺旋Ⅱ604进行转动,飞行螺旋Ⅱ604在转动时产生向下的推动力,进而对四个支撑臂204进行挤压,四个支撑臂204和支撑支架203之间的扭簧被压缩,同时在缓慢启动四个飞行电机Ⅰ504,四个飞行电机Ⅰ504带动飞行螺旋Ⅰ505进行转动,飞行螺旋Ⅰ505转动时产生向上的升力,两个飞行螺旋Ⅱ604产生的向下力大于飞行螺旋Ⅰ505的升力,进而扭簧不断的压缩,突然断开飞行电机Ⅱ603,优选的飞行电机Ⅱ603内设置有抱闸,飞行螺旋Ⅱ604不再进行转动,飞行电机Ⅰ504产生的升力足以带动装置起飞,同时扭簧的力释放,进而推动装置进行弹射起飞。
具体实施方式七:
下面结合图1至10说明本实施方式,本实施方式对实施方式六作进一步说明,所述遥感无人机结构还包括冲击机构6,冲击机构6包括摆动电机Ⅱ601、冲击腔体602、飞行电机Ⅱ603、飞行螺旋Ⅱ604、压气机构605和堵塞柱606,摆动电机Ⅱ601固定连接在连接支架102上,冲击腔体602转动连接在两个侧支架101之间,冲击腔体602和摆动电机Ⅱ601的输出轴传动连接,冲击腔体602上固定连接有两个飞行电机Ⅱ603,两个飞行电机Ⅱ603的输出轴上均固定连接有飞行螺旋Ⅱ604,飞行电机Ⅱ603上固定连接有压气机构605,飞行电机Ⅱ603内固定连接有堵塞柱606。
具体实施方式八:
下面结合图1至10说明本实施方式,本实施方式对实施方式七作进一步说明,所述遥感无人机结构还包括阻挡机构7,阻挡机构7包括伸缩机构701、堵塞塞702和喷气孔703,伸缩机构701固定连接在冲击腔体602上,伸缩机构701的伸缩端上固定连接有堵塞塞702,堵塞塞702上设置有喷气孔703,堵塞塞702堵在冲击腔体602的下端,堵塞柱606堵在喷气孔703内;在装置的飞行和起飞的过程中均可以启动压气机构605,压气机构605可以是气泵,或者其它可以进行往复对气体进行压缩的机械结构,压气机构605主要的功能是将外侧的空气吸入冲击腔体602内,冲击腔体602内的气体被压缩,在装置起飞或者飞行的过程中,需要进行突然的加速时,启动伸缩机构701,伸缩机构701可以是液压缸或者电动推杆,伸缩机构701的伸缩端带动堵塞塞702向下进行运动,堵塞塞702不再对冲击腔体602的下端阻挡,同时堵塞柱606退出喷气孔703内,冲击腔体602内的气体快速排出给装置一个方向上提供冲击力,克服了直升飞机不能进行快速冲击变向的技术问题,启动摆动电机Ⅱ601,摆动电机Ⅱ601的输出轴带动冲击腔体602进行摆动,进而调整气体喷射的方向,满足不同的使用需求。
本发明的一种遥感无人机结构,其工作原理为:
使用时装置在地面上还未起飞时,四个支撑臂204和地面接触,进而对装置进行支撑,启动四个飞行电机Ⅰ504,四个飞行电机Ⅰ504的输出轴带动对应的飞行螺旋Ⅰ505进行转动,进而带动装置进行起飞,当需要装置进行弹射起步时,启动飞行电机Ⅱ603,飞行电机Ⅱ603的输出轴带动飞行螺旋Ⅱ604进行转动,飞行螺旋Ⅱ604在转动时产生向下的推动力,进而对四个支撑臂204进行挤压,四个支撑臂204和支撑支架203之间的扭簧被压缩,同时在缓慢启动四个飞行电机Ⅰ504,四个飞行电机Ⅰ504带动飞行螺旋Ⅰ505进行转动,飞行螺旋Ⅰ505转动时产生向上的升力,两个飞行螺旋Ⅱ604产生的向下力大于飞行螺旋Ⅰ505的升力,进而扭簧不断的压缩,突然断开飞行电机Ⅱ603,优选的飞行电机Ⅱ603内设置有抱闸,飞行螺旋Ⅱ604不再进行转动,飞行电机Ⅰ504产生的升力足以带动装置起飞,同时扭簧的力释放,进而推动装置进行弹射起飞;装置起飞后启动摆动电机Ⅰ301,摆动电机Ⅰ301的输出轴带动摆动支架302进行转动,摆动支架302带动横移滑块304和转动支架305进行转动,转动支架305带动滑动筒306进行转动,滑动筒306带动滑动柱401进行转动,滑动柱401上设置有限位凸起,图中并没有示出,主要是限制滑动柱401的转动,使得滑动柱401只能在滑动筒306内进行滑动,进而滑动筒306带动滑动柱401进行转动,飞行臂4发生偏转,进而飞行臂4带动飞行机构5进行偏转,同时启动横移电机303,横移电机303的输出轴通过螺纹带动横移滑块304进行升降,横移滑块304带动转动支架305进行运动,转动支架305带动滑动筒306进行运动,进而使得滑动柱401在滑动筒306内进行滑动,调整飞行臂4的偏转角度,摆动机构3可以带动飞行臂4进行多范围多角度的偏转;启动收展电机Ⅰ404,收展电机Ⅰ404的输出轴带动收展臂405进行转动,收展臂405带动飞行机构5进行运动,进而调整飞行机构5的收展状态,启动收展电机Ⅱ501,收展电机Ⅱ501的输出轴带动收展转轴503进转动,收展转轴503带动飞行臂502进行运动,进而进一步调整飞行机构5的收展状态,进而在摆动机构3和飞行臂4的带动下飞行机构5进行多方位运动,可以大幅度的改变飞行机构5的位置;在装置的飞行和起飞的过程中均可以启动压气机构605,压气机构605可以是气泵,或者其它可以进行往复对气体进行压缩的机械结构,压气机构605主要的功能是将外侧的空气吸入冲击腔体602内,冲击腔体602内的气体被压缩,在装置起飞或者飞行的过程中,需要进行突然的加速时,启动伸缩机构701,伸缩机构701可以是液压缸或者电动推杆,伸缩机构701的伸缩端带动堵塞塞702向下进行运动,堵塞塞702不再对冲击腔体602的下端阻挡,同时堵塞柱606退出喷气孔703内,冲击腔体602内的气体快速排出给装置一个方向上提供冲击力,克服了直升飞机不能进行快速冲击变向的技术问题,启动摆动电机Ⅱ601,摆动电机Ⅱ601的输出轴带动冲击腔体602进行摆动,进而调整气体喷射的方向,满足不同的使用需求。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种智能遥感无人机结构
- 一种遥感无人机结构