一种多旋翼飞行器
文献发布时间:2023-06-19 10:36:57
技术领域
本发明属于飞行设备技术领域,特别涉及一种多旋翼飞行器。
背景技术
多旋翼无人机由于结构简单,操作可靠,造价经济,目前已成为低空货运,尤其是短途低空货运的一种主力机型,对具有六个以上旋翼的无人机而言,旋翼在机身上结构布局的好坏将直接决定了整个飞行器的总升力及旋翼效率。
目前,多个旋翼通常都采用在一个平面内沿四周等间距排列于机身上的布局,也即所有旋翼安装在机身的同一层面上,由于机身同一层面的空间体积有限,因此旋翼安装轴的数量与旋翼尺寸之间存在反比关系,当需要安装更多的旋翼时,旋翼尺寸就要相应减少,否则就需要增加飞行器的整体尺寸,故而旋翼系统的安装数量以及布置灵活度则受到限制,以致于飞行器的性能不能提升。
发明内容
本发明提供一种多旋翼飞行器,用于解决现有技术中具有六个或者六个以上机臂的多旋翼飞行器,其旋翼系统的安装数量以及布置灵活度受到限制的技术问题。
本发明通过下述技术方案实现:一种多旋翼飞行器,包括:
机身,所述机身的形状为长条形,并且所述机身包括机头和机尾;
第一臂组、第二臂组和第三臂组,所述第一臂组、所述第二臂组以及所述第三臂组均由两根对称设置在所述机身两侧的机臂组成,所述第一臂组位于所述机身的顶端,所述第二臂组位于所述机身的底部靠近所述机头的位置,所述第三臂组位于所述机身的底部靠近所述机尾的位置;
旋翼系统,每根所述机臂上均安装有所述旋翼系统,并且所述第一臂组上的旋翼系统位于所述第二臂组的旋翼系统以及所述第三臂组的旋翼系统的上方。
进一步地,为了更好的实现本发明,货舱,所述货舱设置在所述机身底端。
进一步地,为了更好的实现本发明,每根所述机臂分别通过一个铰接结构转动安装在所述机身上,所述第一臂组的所述机臂的转动方向在竖直面内,所述第二臂组的所述机臂以及所述第三臂组的所述机臂的转动方向在水平面内;
锁紧结构,每根所述机臂分别通过一个所述锁紧结构可拆卸固定于所述机身上。
进一步地,为了更好地实现本发明,所述铰接结构包括铰接座和铰接轴,所述铰接座固设于所述机身上,所述铰接轴穿过所述机臂的一端后转动插装在所述铰接座上,所述旋翼系统安装在所述机臂的另一端;
所述锁紧结构包括锁杆和锁块,所述锁杆的一端转动连接在所述机臂的中部,并且所述锁杆的另一端设有锁孔,所述锁块固设于所述机身上;
其中,在所述锁紧结构将所述机臂锁紧在所述机身上时,所述锁块扣接于所述锁孔中。
进一步地,为了更好地实现本发明,还包括旋翼倾转机构,至少所述第一臂组上的所述旋翼系统通过所述旋翼倾转机构转动安装在所述第一臂组的机臂上。
进一步地,为了更好地实现本发明,所述第二臂组的机臂上以及所述第三臂组的机臂上均安装有位于所述机臂下方的起落支架。
进一步地,为了更好地实现本发明,所述第一臂组、所述第二臂组和所述第三臂组的数量均是一组,所述机身的顶面为自所述机头延伸至所述机尾且朝上拱起的第一线性曲面,所述第一臂组位于所述第一线性曲面的顶部。
进一步地,为了更好地实现本发明,所述第一臂组的数量为两组,所述第二臂组和所述第三臂组的数量均是一组,所述机身的顶面为自所述机头延伸至所述机尾且朝上拱起的第二线性曲面,所述机身单侧的四根所述机臂分别位于同一梯形的四个顶点上。
进一步地,为了更好地实现本发明,所述第一臂组的数量为三组,所述第二臂组和所述第三臂组的数量均是一组,所述机身的顶面为自所述机头延伸至所述机尾且朝上拱起的第三线性曲面,其中一组所述第一臂组位于所述第三线性曲面的顶部,另外两组所述第一臂组分别位于所述第三线性曲面顶部的两侧。
进一步地,为了更好地实现本发明,所述第一臂组的数量为两组,所述第二臂组和所述第三臂组的数量均是一组,所述机身的顶面为自所述机头延伸至所述机尾并朝上拱起的弯折面,所述机身单侧的四根所述机臂分别位于同一四边形的四个顶点上。
本发明相较于现有技术具有以下有益效果:
本发明提供的多旋翼飞行器包括机身,第一臂组、第二臂组、第三臂组以及旋翼系统,机身的形状为长条形,并且机身包括机头和机尾,第一臂组、第二臂组以及第三臂组均由两根对称设置在机身两侧的机臂组成,第一臂组位于机身顶端,第二臂组位于机身的底部靠近机头的位置,第三臂组位于机身的底部靠近机尾的位置,在每根机臂上均安装由旋翼系统。通过上述结构,本发明提供的多旋翼飞行器能够安装旋翼的空间则更大,和现有技术相比,在相同机身尺寸以及相同旋翼大小的情况下,本实施例提供的多旋翼飞行器则可以安装更多的旋翼,旋翼数量增多,则可以使得其总升力以及旋翼效率均得以增强,旋翼的布置更加灵活,换句话说,当安装的旋翼数量以及尺寸相同时,本实施例提供的多旋翼飞行器的机身可制造得更小,从而使得结构更加紧凑,另外,机身单侧的各个旋翼之间的距离增大之后,能够方便机舱门的布置,第一臂组上的旋翼位于整个多旋翼飞行器的重心之上,从而使得多旋翼飞行器飞行时的自稳效果更好,而且,第一臂组上的旋翼尺寸可以制造得比第二臂组以及第三臂组的旋翼更大,这样,可进一步提升飞行稳定性、增强旋翼效率以及总升力,并且由于第一臂组的旋翼离地较高,从而有效降低起飞或者降落时的地效效应。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
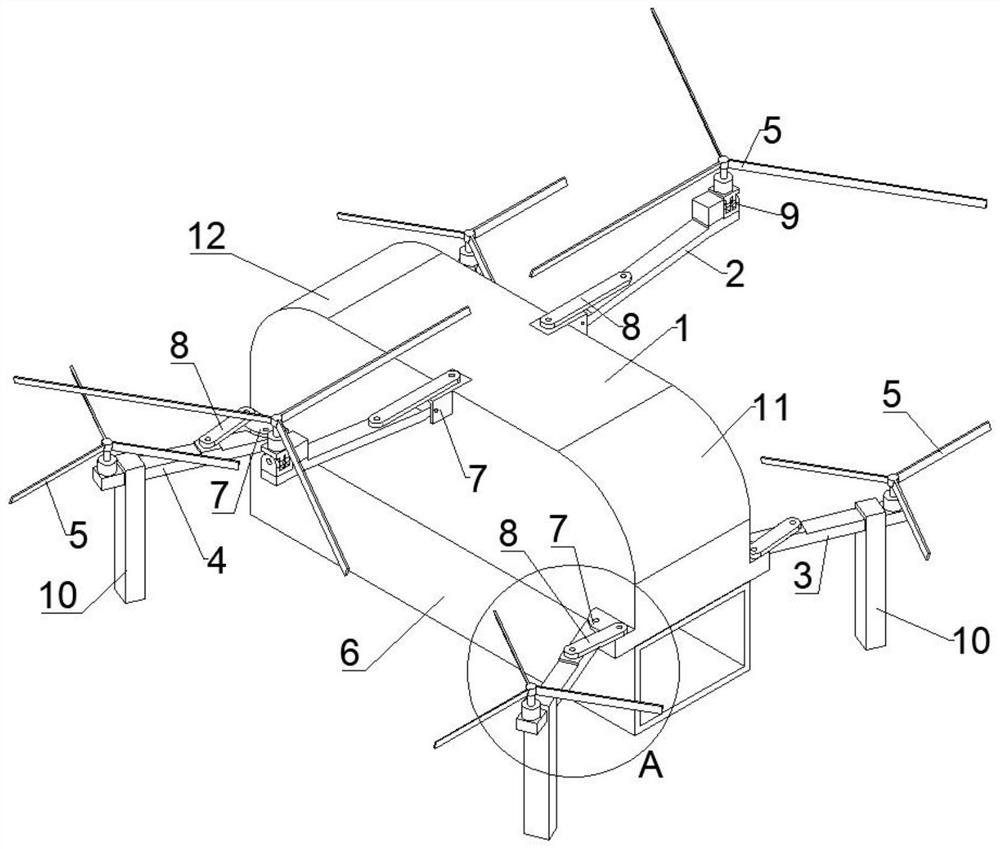
图1是本申请中的多旋翼飞行器的结构示意图;
图2是图1中的A区域局部放大图;
图3是本申请中的多旋翼飞行器的爆炸图;
图4是图3中的B区域局部放大图;
图5是本申请中机身上安装的第一臂组、第二臂组以及第三臂组的数量均是一组时的结构示意图;
图6是本申请中机身上安装的第一臂组为两组、第二臂组以及第三臂组均是一组时的结构示意图(机身顶面为第二线性曲面);
图7是本申请中机身上安装的第一臂组为两组、第二臂组以及第三臂组均是一组时的结构示意图(机身顶面为弯折面);
图8是本申请中机身上安装的第一臂组为三组、第二臂组以及第三臂组均是一组时的结构示意图。
图中:
1-机身;11-机头;12-机尾;
2-第一臂组;
3-第二臂组;
4-第三臂组;
5-旋翼系统;
6-货舱;
7-铰接结构;71-铰接座;72-铰接轴;
8-锁紧结构;81-锁杆;82-锁块;
9-旋翼倾转机构;91-齿座;92-圆杆;93-转动块;94-旋转电机;
10-起落支架。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
实施例1:
本实施例提供一种多旋翼飞行器,用于解决现有技术中具有六个或者六个以上旋翼的多旋翼飞行器,其旋翼系统的安装数量以及布置灵活度受到限制的技术问题。具体地,现有技术中,具有六个或者六个以上旋翼的多旋翼飞行器的旋翼安装方式有三种,第一种是所有旋翼都安装在机身顶部,第二种是所有旋翼都安装在机身中部,第三种是所有旋翼都安装在机身底部,不管哪一种安装方式,所有旋翼均安装在机身同一层面上,由于机身同一层面周边的空间体积有限,也即旋翼系统安装空间尺寸有限,这样,则使得旋翼系统数量以及旋翼的尺寸大小呈反比关系,如若旋翼更多,则旋翼的尺寸则需要做得更小,如若旋翼的尺寸做得更大,则能安装的旋翼数量则相应减少,否则就会使得相邻的旋翼之间发生干涉而不能正常运行,另一种方式便是增加机身尺寸,但是这样则会造成机身重量增大的问题。
本实施例提供的多旋翼飞行器包括机身1、第一臂组2、第二臂组3、第三臂组4以及旋翼系统5,机身1的整体形状为长条形,并且机身1包括机头11和机尾12,具体地,机身1的整体形状呈长条且扁平的形状,更具体地,机头11和机尾12设置在机身1长度方向的两端,机头11和机尾12之间的连线长度大于机身1上顶点到机头11机尾12之间连线的垂线长度,另外,机身1上顶点到机头11机尾12之间连线至少大于机身1宽度的60%。
上述第一臂组2、第二臂组3以及第三臂组4均由两根对称设置在机身1两侧的机臂组成,在每根机臂上均安装有旋翼系统5,值得注意的是,本实施例中,每根机臂上安装的旋翼系统5可以为一个,这样,本实施例提供的多旋翼飞行器的旋翼系统5的数量则是六个,当然,也可以在每根机臂上安装一上一下两个旋翼系统5,此时,本实施例提供的多旋翼飞行器的旋翼系统5的数量则是十二个,以获得更好的升力,提升载重能力,因此本实施例提供的多旋翼飞行器实际为一种至少具有六个旋翼系统5的飞行器。另外,第一臂组2上的旋翼系统位于第二臂组3的旋翼系统以及第三臂组3的旋翼系统的上方
本实施例中,第一臂组2位于机身1的顶端,最优地,第一臂组2位于机身1顶端未靠近机头11或者机尾12的位置,第二臂组3位于机身1的底部靠近机头11的位置,第三臂组4位于机身1的底部靠近机尾12的位置。这样布置,位于机身1单侧的多个机臂中,第二臂组3和第三臂组4的机翼位于机身1同层(底部),但是第二臂组3的机臂位于靠近机头11的位置,第三臂组4的机臂位于靠近机尾12的位置,第二臂组3的机臂和第三臂组4的机臂之间间距很大,第一臂组2的机臂位于机身1顶端,此时,第一臂组2的机臂和第二臂组3/第三臂组4的机臂没有在同一层面,故而第一臂组2的机臂相距第二臂组3的机臂以及三臂组的机臂之间的距离均较大。而且,第二臂组3和第三臂组4中的旋翼系统5的旋翼所处位置高度低于第一臂组2的旋翼系统5的旋翼所处位置高度。
通过上述结构,本实施例提供的多旋翼飞行器上,能够安装旋翼的空间则更大,和现有技术相比,在相同机身1尺寸以及相同旋翼大小的情况下,本实施例提供的多旋翼飞行器则可以安装更多的旋翼,旋翼数量增多,则可以使得其总升力以及旋翼效率均得以增强。换句话说,当安装的旋翼数量以及尺寸相同时,本实施例提供的多旋翼飞行器的机身1可制造得更小,从而使得结构更加紧凑。另外,机身1单侧的各个旋翼之间的距离增大之后,能够方便机舱门的布置。第一臂组2上的旋翼位于整个多旋翼飞行器的重心之上,从而使得本实施例提供的多旋翼飞行器飞行时的自稳效果更好。作为本实施例的一种最佳实施方式,本实施例中,第一臂组2上的旋翼尺寸大于第二臂组3以及第三臂组4,这样,可进一步提升飞行稳定性、增强旋翼效率以及总升力,并且由于第一臂组2的旋翼离地较高,从而有效降低起飞或者降落时的地效效应。另外,本实施例中,第二臂组3的机臂与第三臂组4的机臂之间的连线长度大于第一臂组2的机臂与该连线之间的垂线长度,而且第一臂组2的机臂与该连线之间的垂线长度大于机身1宽度的百分之六十以上。
作为本实施例的一种实施方式,本实施例中的多旋翼飞行器还包括旋翼控制器,其中,第一臂组2上的旋翼系统5与一个旋翼控制器电性连接,第二臂组3上的旋翼系统5以及第三臂组4上的旋翼系统5均与另一个旋翼控制器电性连接,这样,位于机身1顶端的旋翼和位于机身1底部的旋翼通过两个旋翼控制器分开控制,这样可提高飞行的安全性。作为本实施例的另一种实施方式,本实施例中的第一臂组2上的旋翼系统5和第二臂组3上的旋翼系统5以及第三臂组4上的旋翼系统5均与一个旋翼控制器电性连接。值得注意的是,本实施例中的旋翼控制器和现有技术中的旋翼飞行器一样,其作为现有技术,故而在此不再对其进行详尽的赘述。
作为本实施例的一种更优实施方式,本实施例中,在机身1的底端设置有货舱6,具体地,货舱6挂载于机身1底端,或者货舱6焊接在机身1底端,以便于运输货物。在货舱6的侧壁上便可以设置舱门。作为本实施例的另一种实施方式,本实施例中的货舱6也可以设置在机身1内部,并位于机身1的中后部位。
作为本实施例的一种更优实施方式,本实施例中,每根机臂分别通过一铰接结构7转动安装在机身1上,并且第一臂组2的机臂的转动方向在竖直面内,第二臂组3的机臂以及第三臂组4的机臂转动方向在水平面内,并且每根机臂与机身1之间还设置有锁紧结构8,在需要飞行时,每根机臂都展开且使用锁紧结构8锁紧在机身1上,当需要使用卡车或者其余运输工具运输该多旋翼飞行器时,则将锁紧结构8解锁,并使得第一臂组2的机臂朝下折叠,使得第一臂组2和第二臂组3的机臂朝中间折叠,从而方便运输。另外,本实施例中,第一臂组2、第二臂组3以及第三臂组4之间的位置关系使得三个臂组彼此之间具有足够的空间以便于机臂折叠。值得注意的是,当锁紧结构8锁紧后,第一臂组2中的机臂朝上倾斜,第二臂组3中的机臂朝多旋翼飞行器的前方倾斜,第三臂组4中的机臂朝多旋翼飞行器的后方倾斜,以在彼此之间留出更宽的空间。
作为本实施例的一种具体实施方式,本实施例中的铰接结构7包括铰接座71和铰接轴72,其中,铰接座71焊接或者通过螺钉连接在机身1上,铰接轴72穿过机臂的一端后转动插装在铰接座71上,从而使得机臂转动连接在机身1上,上述旋翼系统5包括电动机以及电动机带动转动的旋翼,而旋翼系统5的电动机则安装在机臂的另一端且旋翼位于机臂上方。本实施例中的锁紧结构8包括锁杆81和锁块82,锁杆81的一端转动连接在机臂的中部,并且锁杆81的另一端设有锁孔,锁块82焊接或者一体成型设置在机身1上,锁紧时,锁块82扣接在锁孔中,此时,利用锁杆81的连接作用,便可以对机臂和机身1之间的相对位置进行锁紧。该种铰接结构7以及锁紧结构8具有结构简单,重量轻的优点。
作为本实施例的一种更具体实施方式,本实施例中的铰接座71为槽钢,铰接轴72为销钉,第一臂组2对应的槽钢的槽口朝下,第一臂组2的机臂则插在第一臂组2的槽钢槽口中且可在其中转动,第二臂组3对应的槽钢的槽口朝向机身1后方,第二臂组3的机臂则插在第二臂组3的槽钢槽口中且可在其中转动,第三臂组4对应的槽钢的槽口朝向机身1前方,第三臂组4的机臂则插在第三臂组4的槽钢槽口中且可在其中转动。销钉则穿过槽钢的侧壁以及机臂的一端,从而实现机臂铰接在机身1上。
作为本实施例的一种更优实施方式,本实施例中,至少第一臂组2上的旋翼系统5通过旋翼倾转机构9转动安装在第一臂组2的机臂上。最佳地,第一臂组2上的旋翼系统5通过旋翼倾转机构9转动安装在第一臂组2的机臂上,第二臂组3上的旋翼系统5通过另一旋翼倾转机构9转动安装在第二臂组3的机臂上,第三臂组4上的旋翼系统5通过另外一个旋翼倾转机构9转动安装在第三臂组4的机臂上。此时,第二臂组3上的旋翼和第三臂组4上的旋翼可以倾转一定角度,从而使得本实施例提供的飞行器能够实现俯仰、斜冲等动作/飞行,但是需要说明的是,当第二臂组3的旋翼和第三臂组4上的旋翼在对应的旋翼倾转机构9驱动下而位于水平面内且位于相应机臂上方时,第二臂组3的旋翼和第三臂组4的旋翼旋转能提供升力。当然,也可以只有在第一臂组2的旋翼和第一臂组2的机臂之间设置旋翼倾转结构。采用上述结构,则可以使得本实施例提供的多旋翼飞行器能够是适用于多种不同的场景,譬如当降落在水面上时,则可以通过旋翼倾转机构9驱动旋翼倾转而实现在水面上行驶。另外,本实施例中,第一臂组2、第二臂组3以及第三臂组4之间的位置关系使得三个臂组彼此之间具有足够的空间以便于旋翼倾转。
作为本实施例的一种更优实施方式,本实施例中,在机身1下部、或者上述货舱6以及第二臂组3以及第三臂组4内安装有浮力球,以便于本实施例提供的多旋翼飞行器在水面漂浮。值得注意的是,本实施例中,上述第一臂组2上的旋翼在旋翼倾转机构9的驱动下可以转至水平(也即第一臂组2上的旋翼在水平面内转动),也可以转至竖直(也即在竖直面内转动),并且,当第一臂组2上的旋翼转至在竖直面内转动时,第一臂组2上的旋翼外缘高于机身1或者货舱6的底端。
由于上述浮力球的作用,当本实施例提供的飞行器降落在水面上时,第一臂组2上的旋翼在相应的旋翼倾转机构9驱动下转至竖直,从而使得第一臂组2上的旋翼能够在竖直面内转动,以使得本实施例提供的飞行器能够在水面行驶,因此本实施例提供的多旋翼飞行器则是一种既能在空中飞行的飞行器,也可以在水面漂浮/行驶的飞行器,也即一种水空两用飞行器。以及,本实施例提供的多旋翼飞行器至少具有两种状态,第一状态,第一臂组2上的旋翼在旋翼倾转机构9的作用下转至水平并位于第一臂组2的上方,此时,第一臂组2上的旋翼旋转则可以提供升力,第二状态,第一臂组2上的旋翼在旋翼倾转机构9的作用下转至竖直,此时,第一臂组2上的旋翼旋转则可以为本实施例提供的飞行器提供水面上行驶的动力。和现有技术中能够停留在水面的飞行器相比,本实施例提供的飞行器不仅能够在水面停留,还可以在水面上行驶,其实用性更强,从而解决现有技术中多旋翼无人机不能在水面上行驶的技术问题。
作为本实施例的一种具体实施方式,本实施例中的旋翼倾转机构9包括齿座91、圆杆92、转动块93以及旋转电机94,齿座91固设在机臂的另一端上表面,并且齿座91的齿槽朝上,转动块93插接在齿槽中,旋转电机94安装在机臂上,圆杆92键接在转动块93上且圆杆92转动插接在齿槽的槽壁上,上述旋转电机94的动力输出端与上述圆杆92通过联轴器连接,上述旋翼系统5的电动机在安装在上述转动块93上,这样,电动机运行时则可以带动转动块93以及其上的旋翼系统5相对于机臂旋转/倾转。
作为本实施例的一种更优实施方式,本实施例中,在上述第二臂组3的机臂上以及第三臂组4的机臂上均通过螺钉安装有位于机臂下方的起落支架10,值得注意的是,本实施例中的起落支架10实际上是一根杆体,该起落支架10的底端低于上述机身1底端/货舱6底端。当本实施例提供的多旋翼飞行器降落在地面时,起落支架10搭接在地面上,以便于该多旋翼飞行器平稳起飞以及着陆。本实施例中的起落支架10相较于现有技术而言,其具有结构更简单,质量更轻的优点。而且由于第二臂组3的机臂和第三臂组4的机臂相距位置较远,因此各个起落支架10之间的距离较远,因此,本实施例中的多个起落支架10能够更加稳固地支撑机身1。相较于现有技术中旋翼安装在机身1顶部的飞行器而言,本实施例提供的多旋翼飞行器不需要安装专门的起落架,从而使得多旋翼飞行器的结构更加简化。更优地,本实施例中的起落支架10上也可以加装浮力球,从而增大本实施例提供的多旋翼飞行器在水中的浮力。
作为本实施例的一种实施方式,本实施例中的第一臂组2、第二臂组3以及第三臂组4的数量均是一组,并且机身1的顶面为自机头11延伸至机尾12且朝上拱起的第一线性曲面,也即该机身1的顶面为拱面,上述第一臂组2位于第一线性曲面的顶部。该种结构中,机身1单侧的三个机臂则位于同一三角形的三个顶点上。该种结构的多旋翼飞行器中,机身1单侧的三个机翼之间的距离较大,第一臂组2的机臂周边空间很大,可安装更大尺寸的旋翼。
作为本实施例的另一种实施方式,本实施例中的第一臂组2的数量为两组,第二臂组3和第三臂组4的数量均是一组,机身1的顶面为自机头11延伸至机尾12且朝上拱起的第二线性曲面,此时,机身1单侧的四根机臂分别位于同一梯形的四个顶点上,并且该梯形为上底位于下底上方的梯形,最佳地,该梯形为上小下大的等腰梯形。本实施例中,机身1顶面上安装的旋翼(第一臂组2的旋翼)可以和第二臂组3以及第三臂组4上安装的旋翼尺寸相同。
作为本实施例的另外一种实施方式,本实施例中的第一臂组2的数量为三组,第二臂组3和第三臂组4的数量均是一组,机身1的顶面为自机头11延伸至机尾12且朝上拱起的第三线性曲面,其中一组第一臂组2位于第三线性曲面的顶部,另外两组第一臂组2分别位于第三线性曲面顶部的两侧,此时,机身1单侧的五根机臂分别位于同一五边形的五个顶点上。
作为本实施例的另一实施方式,本实施例中的第一臂组2的数量为两组,第二臂组3和第三臂组4的数量均是一组,机身1的顶面为自机头11延伸至机尾12并朝上拱起的弯折面,两组第一臂组2分别位于弯折面的弯折节点处,该结构中,机身1单侧的四根机臂分别位于同一四边形的四个顶点上。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明记载的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 多旋翼飞行器电子控制装置、多旋翼飞行器的航拍电子控制装置及跟随航拍式多旋翼飞行器
- 一种多旋翼飞行器用翼展控制系统和多旋翼飞行器